MATLAB实现控制系统的根轨迹分析 |
您所在的位置:网站首页 › 根轨迹分离点怎么用计算器 › MATLAB实现控制系统的根轨迹分析 |
MATLAB实现控制系统的根轨迹分析
|
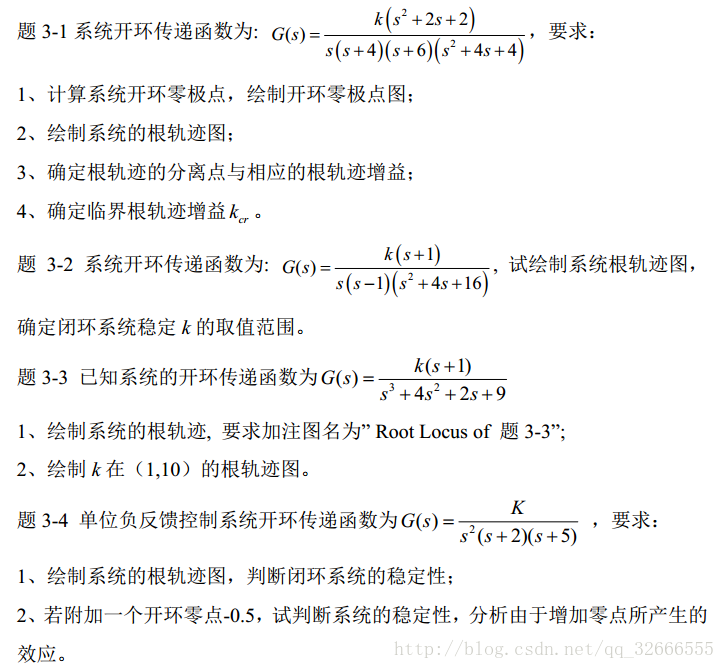
要点
1、零极点图绘制 2、根轨迹图绘制 3、 rlocfind()函数 4、 sgrid()函数 实操
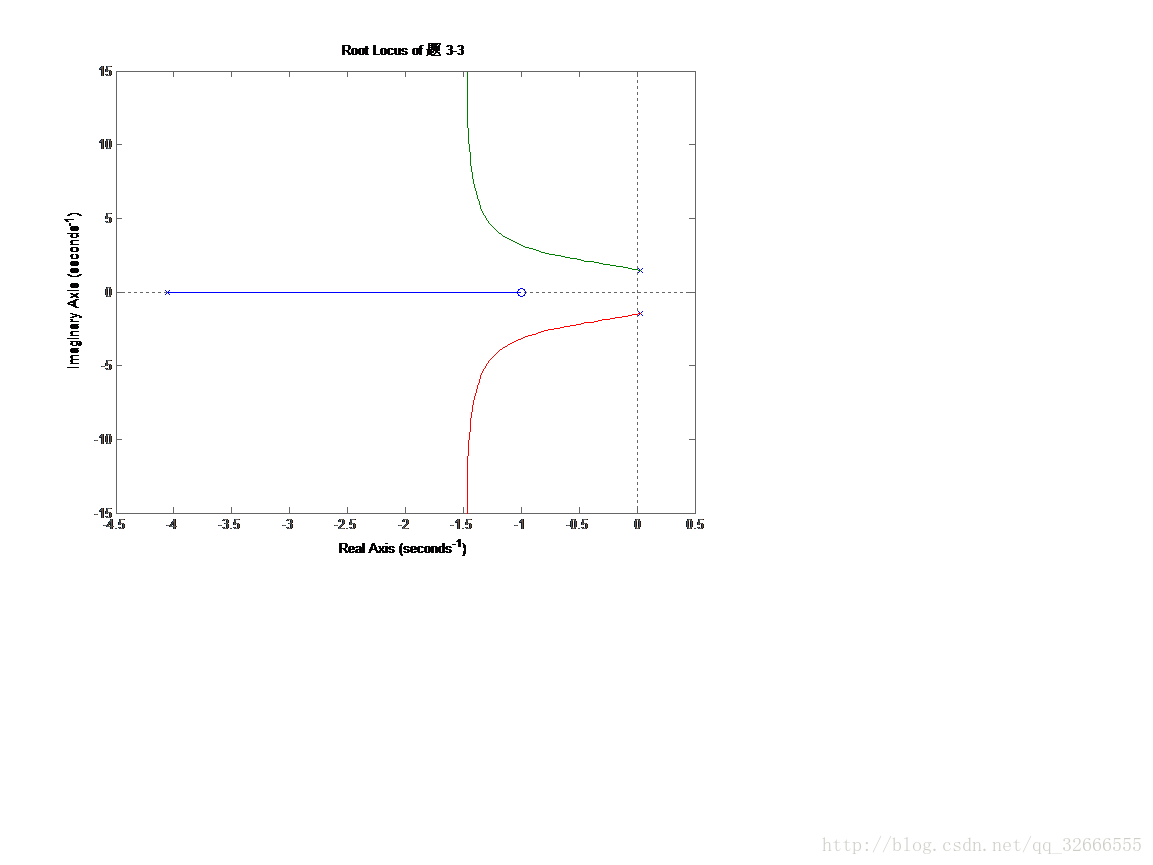
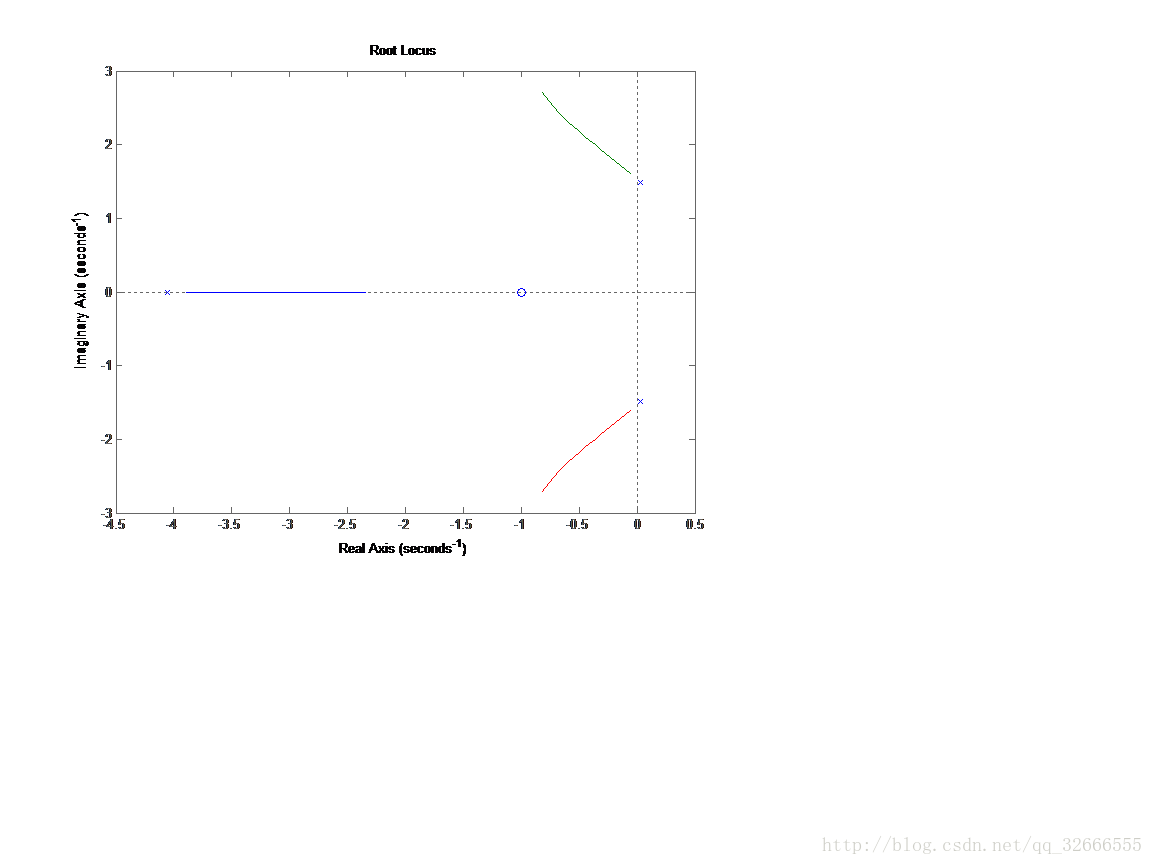
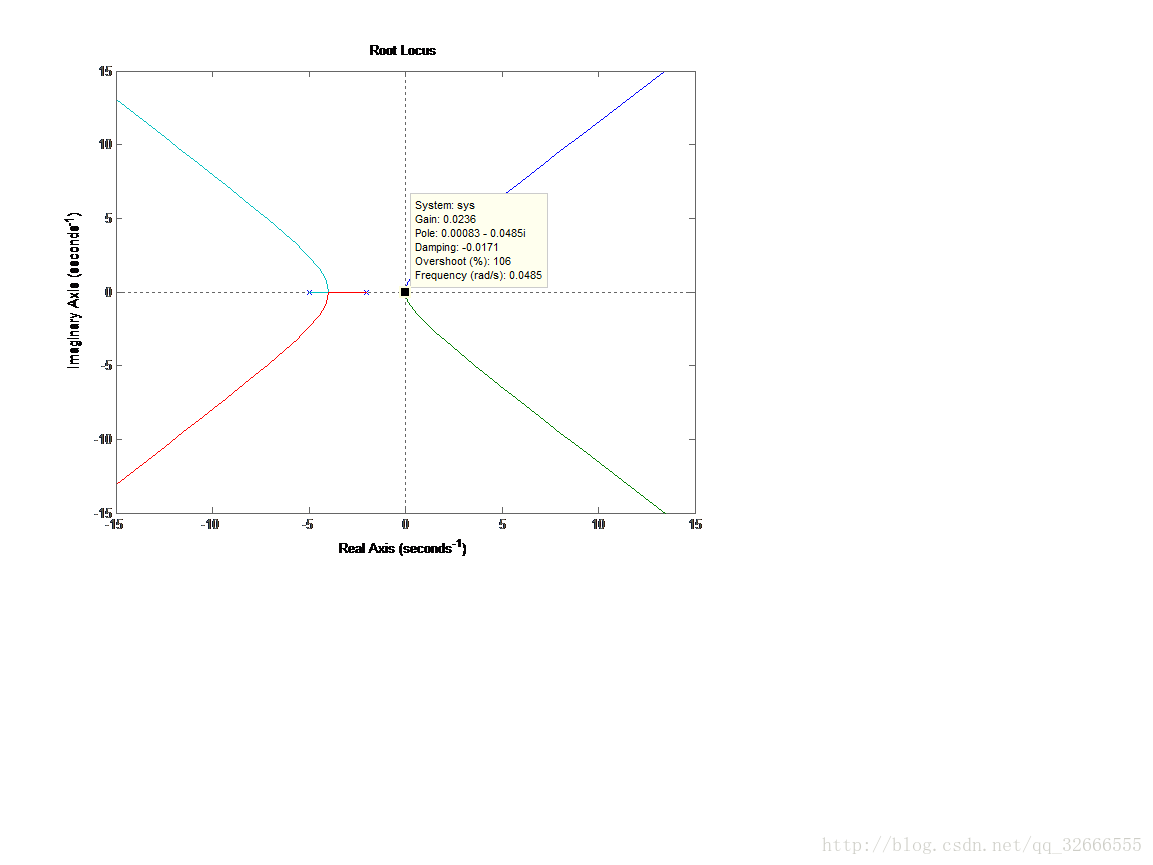
调用rlocfind()函数,求出系统与虚轴交点的K值,可得与虚轴交点的K值为34.0224,故系统稳定的K的范围为(0, 34.0224) 3-3 num=[1 1]; den=[1 4 2 9]; figure(1);rlocus(num,den) title('Root Locus of 题 3-3'); k=1:0.5:10; figure(2);rlocus (num,den,k)
加入零点-0.5后,当K |
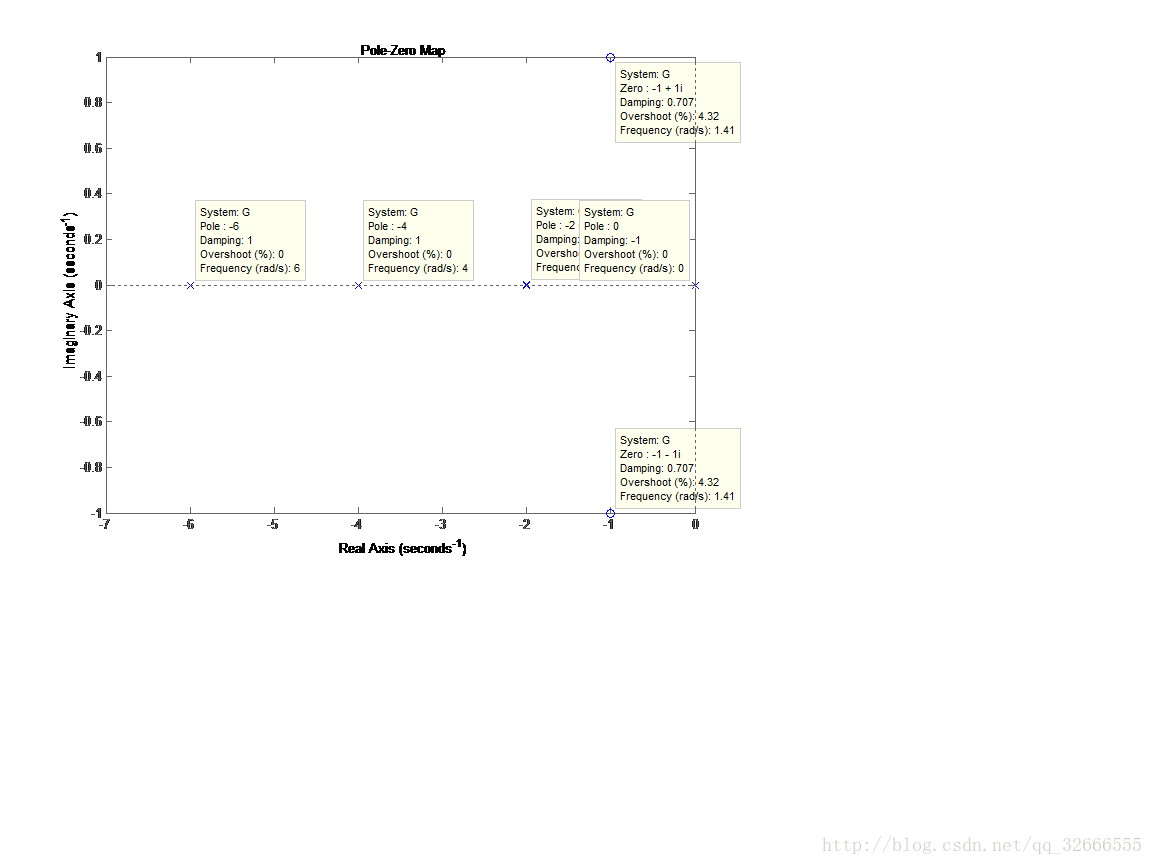
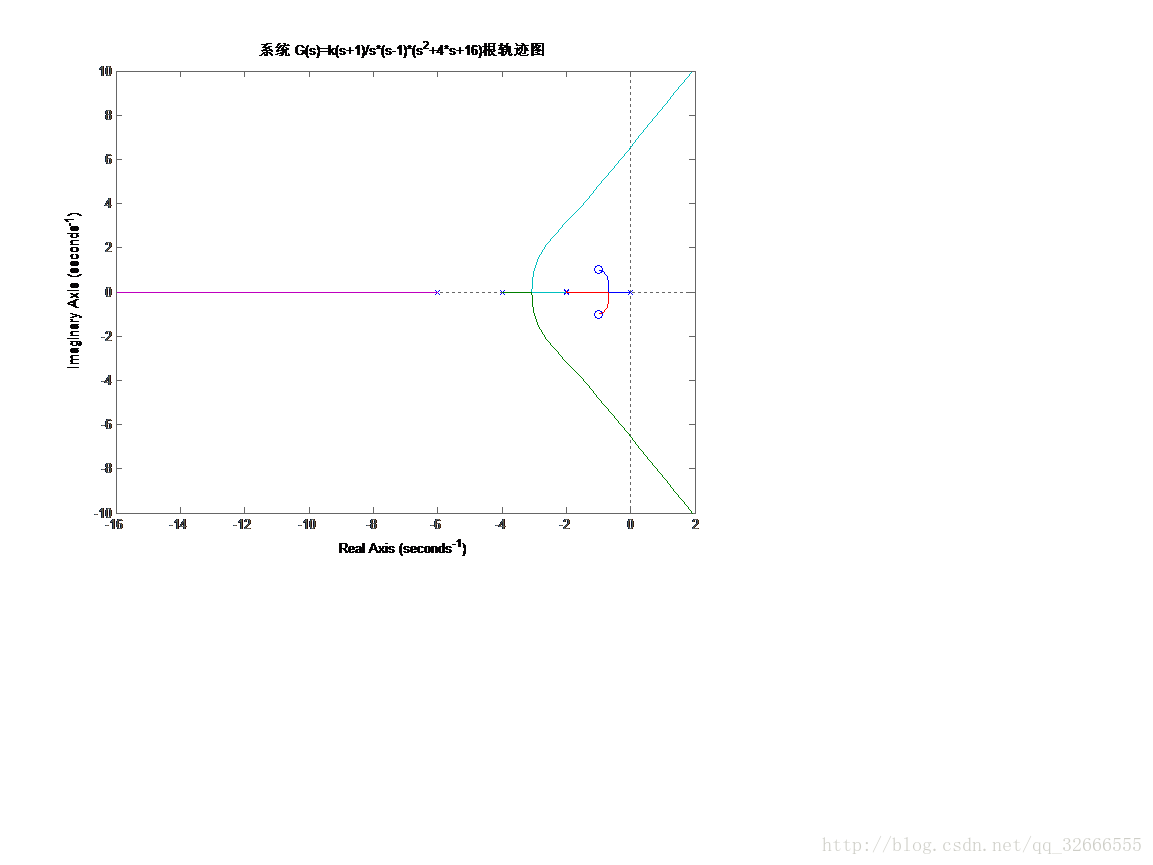
 由图得分离点 d=-3.1,相应的根轨迹增益 k=1.81
由图得分离点 d=-3.1,相应的根轨迹增益 k=1.81 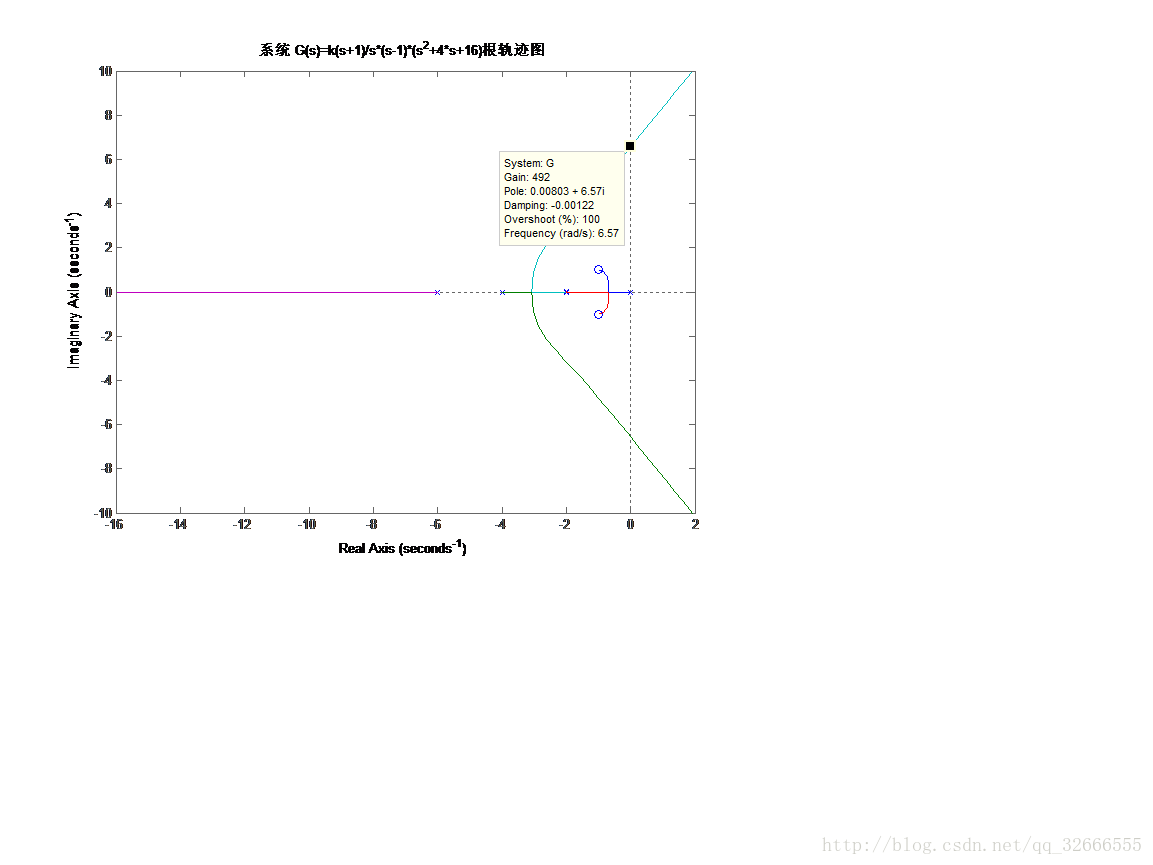 由图得临界根轨迹增益kcr =492
由图得临界根轨迹增益kcr =492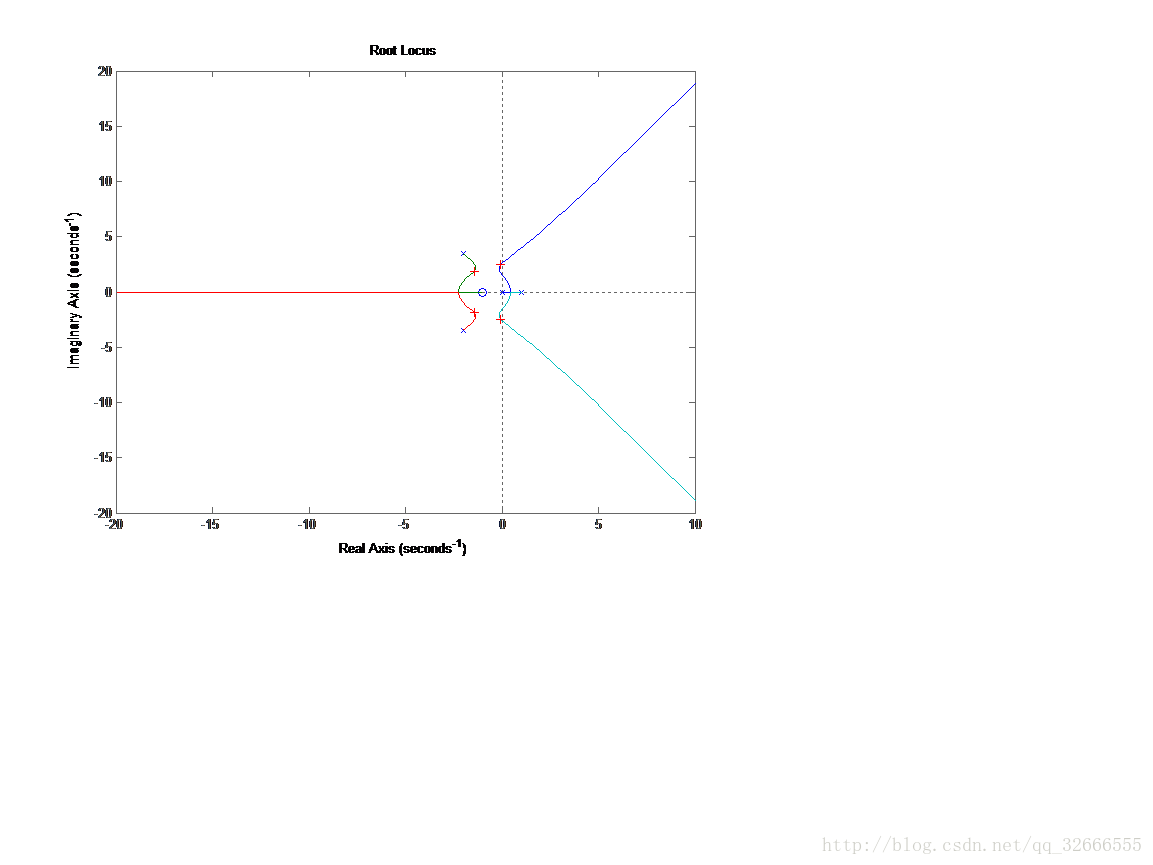
 无论K取何值,系统都不稳定。
无论K取何值,系统都不稳定。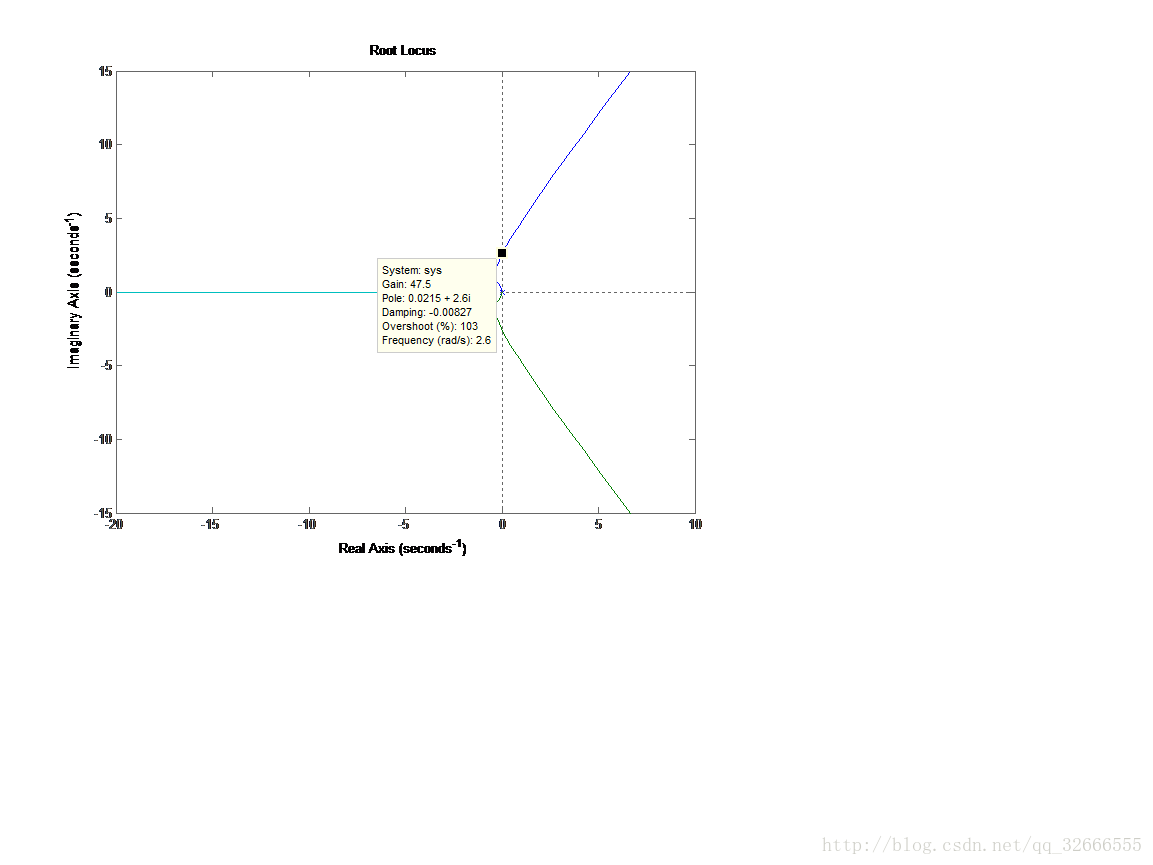
【本文地址】