PX4 飞控源码系统框架介绍 |
您所在的位置:网站首页 › romfs文件夹下的model › PX4 飞控源码系统框架介绍 |
PX4 飞控源码系统框架介绍
|
如下介绍对应于上面的红色标识 1、编译以后生成的固件,烧录进飞控即可。内部会有一些需要用到的头文件和.cp文件p。 2、mavlink协议部分,负责地面站通信的库文件都在此。 3、msg是负责进程间通信的消息集合,在自己创建私有任务时需要再次文件内部添加需要的数据结构。 4、Nutt是飞控所用的OS,这个不做系统移植不需要深入研究。我们所做的都是OS之上的。 5、ROMFS内部是启动文件,配置需要启动哪些任务与启动顺序,还有一些就是关于系统默认的一些配置。具体配置哪些需要阅读启动脚本了解。 6、SRC内部就是所有的sensor驱动和各种任务,比如姿态解算和姿态控制、位置解算和位置控制等等。 7、makefile内部是常用的命令行指令集合。 下面主要介绍一下SRC文件夹里面的东西
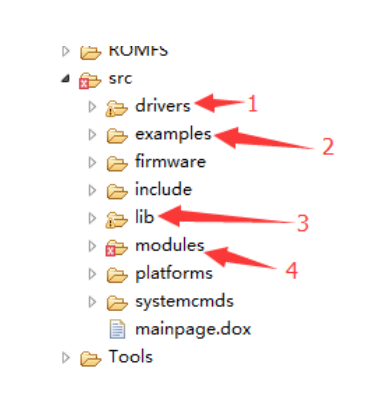
1、drivers:所使用到的所有的sensor驱动程序都在此处。(如果添加sensor,注意该处) 2、顾名思义,实现代码,创建私有任务时可以参考。 3、Lib库,很多矩阵运算相关的数学库。 4、重点,飞行模式,姿态解算,姿态控制,位置结算,位置控制,落地检测等任务都在该modules里面。(飞控相关算法都在该处) 下面介绍重点modules
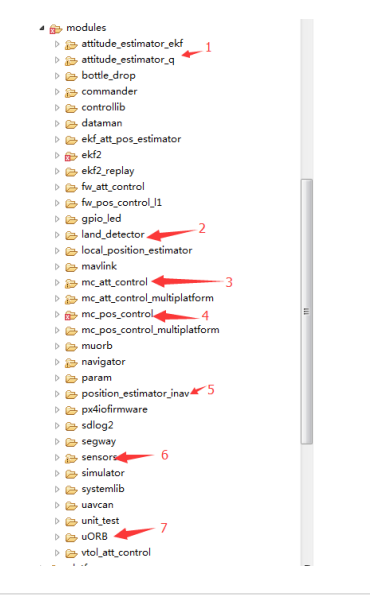
1、姿态解算的代码实现部分 2、落地检测的代码实现部分 3、姿态控制的代码实现部分 4、位置控制的代码实现部分 5、位置解算的代码实现部分 6、各种sensors的初始化部分 7、uORB:进程间通信所用
|
【本文地址】
今日新闻 |
推荐新闻 |