最新轨迹预测综述:从基础定义到各类方法、评测汇总 |
您所在的位置:网站首页 › 飞机的实时轨迹图准吗可信吗 › 最新轨迹预测综述:从基础定义到各类方法、评测汇总 |
最新轨迹预测综述:从基础定义到各类方法、评测汇总
|
点击下方卡片,关注“自动驾驶之心”公众号 ADAS巨卷干货,即可获取 >>点击进入→自动驾驶之心【轨迹预测】技术交流群 论文作者 | claire 编辑 | 自动驾驶之心 0 写在前面最近很多小伙伴来向我们咨询轨迹预测相关的入门学习基础,今天我们也为大家分享下轨迹预测的定义、输出格式、常用的相关术语,常用的轨迹预测方法论,以及评测方式。所有的内容都为日常笔记输出,建议收藏,有时间随时可以学习!所有参考文献,底部备有出处~ 以上内容均出自《轨迹预测理论实战&论文带读课程》,双十一八折优惠进行中!
道路位置、人行横道位置、车道方向 1.1.2 周围车辆信息当前状态、历史轨迹 1.1.3 目标车辆信息当前状态、历史轨迹:  1.2 轨迹预测的输出
1.2.1 目标车辆未来轨迹及分布
1.2 轨迹预测的输出
1.2.1 目标车辆未来轨迹及分布
目标车辆(1~N)的未来f个时刻的轨迹及轨迹分布:  1.2.2 输出类型
1.2.2 输出类型
单模态轨迹、多模态轨迹 1.3 相关术语轨迹(trajectory):一个物体或实体随时间变化的运动。它表示对象经过的一系列位置或状态。机动(manoeuvre):车辆或物体所执行的特定动作或运动,如变道、转弯、合并、加速、减速和停止。自身车辆(Ego Vehicle,EV):自动驾驶汽车本身。目标车辆(Target Vehicle,TV):期望得到预测轨迹的车辆。周围车辆(Surrounding Vehicle,SV):TV周围对其运动产生影响的车辆。无关车辆(Non-Effective Vehicle,NV):不会对TV运动产生影响的车辆。 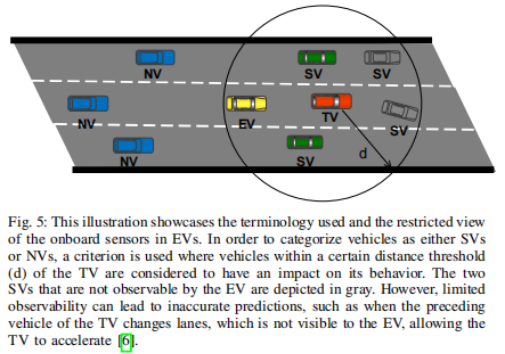 2 传统轨迹预测方法
2.1 基于物理的方法
2.1.1 物理模型
2 传统轨迹预测方法
2.1 基于物理的方法
2.1.1 物理模型
1)通常采用动力学(形式复杂)或运动学(形式简单,更常用)模型来描述物理行为。2)也可采用体现微观交互的模型:跟车模型(例,智能驾驶员模型(IDM))、换道模型-微观交通建模常用3)可为使用单一模型,也可使用交互多模型(IMM,用IMM-KF实现结合)-参考文献16 2.1.2 干扰/不确定性处理方式一:卡尔曼滤波器(KF),得到滤波处理后的一条轨迹-参考文献39。方式二:粒子滤波方式三:蒙特卡洛(MC)模拟:得到未来轨迹分布-参考文献40、41。 2.1.3 优缺点分析优点:可解释性强,性能稳定;运动学计算简单;缺点:复杂的动力学模型计算量大;仅适合短时预测( |

【本文地址】