【速腾聚创混合固态激光雷达RS |
您所在的位置:网站首页 › 速腾聚创产品怎么样 › 【速腾聚创混合固态激光雷达RS |
【速腾聚创混合固态激光雷达RS
|
【RS-M1系列 - 0】速腾聚创混合固态激光雷达RS-M1简介与实物开箱
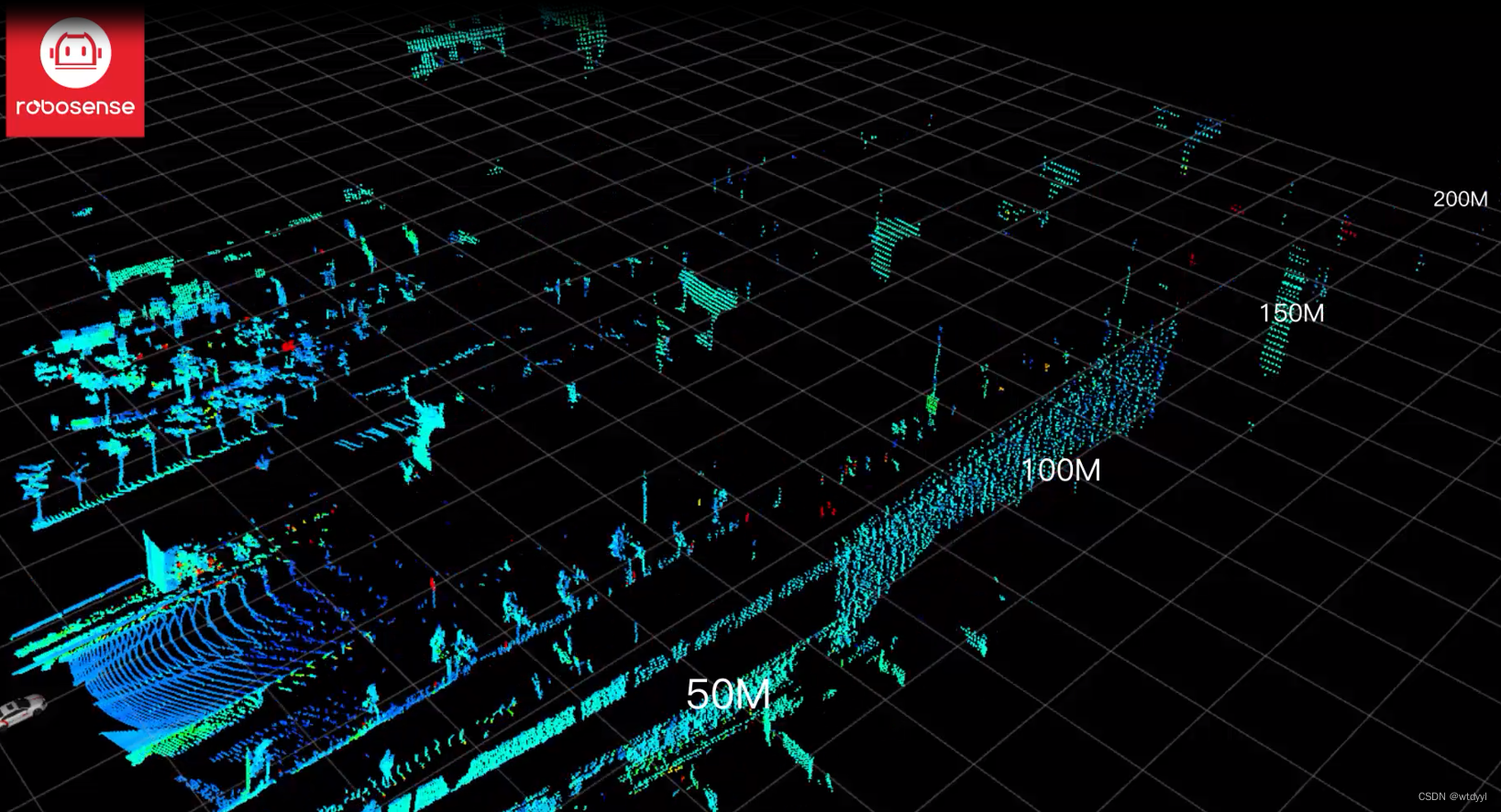
这是我在CSDN的第一篇博客,文中难免有疏漏甚至错误,如有错误敬请在评论区指出,相互学习~ 网上关于传统机械式激光雷达的技术文档已经相当丰富,但关于固态/半固态的仍然很少,本系列主要介绍速腾聚创激光雷达RS-M1。(刚到手,学习ing) 文章目录 【RS-M1系列 - 0】速腾聚创混合固态激光雷达RS-M1简介与实物开箱RS-M1简介主要参数参数说明 实物开箱优劣分析参考资料 RS-M1简介目前,激光雷达分为传统机械旋转式和固态/半固态,速腾聚创的RS-M1采用MEMS微振镜技术实现面阵扫描,采用TOF技术测距,具体原理在此不做深究,将其归类为一种混合固态的激光雷达。自2019年推出以来已经面向自动驾驶量产,通过采取不同的安装方式,RS-LiDAR-M1可满足L3/L4甚至更高级别的自动驾驶需求。下图为官方宣传视频效果图
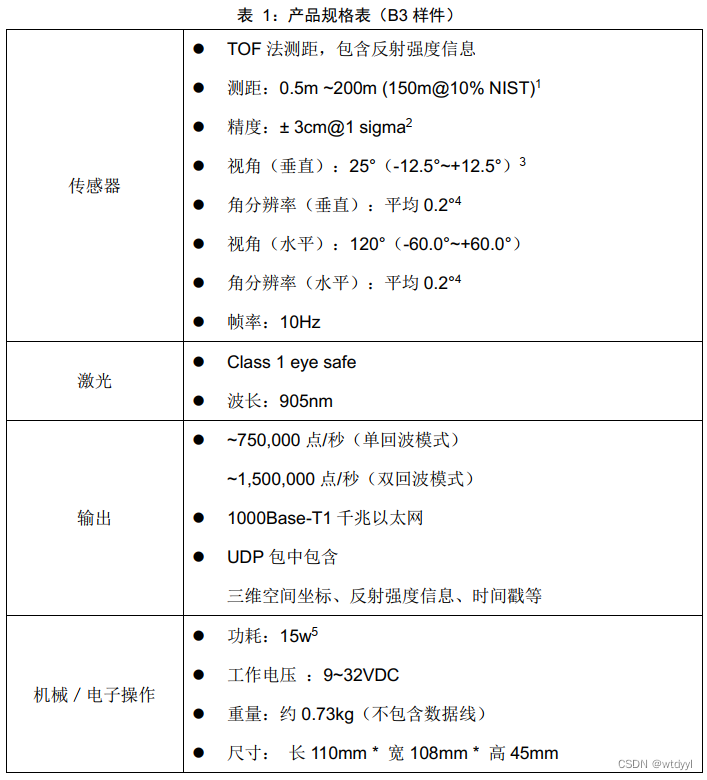
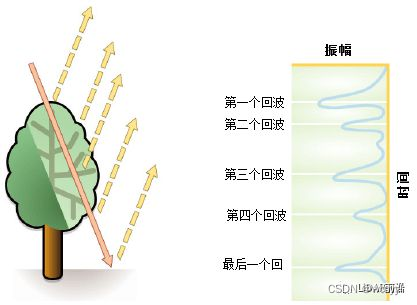
在此主要说明以下几个参数: 测距能力 目前,激光测距传感器所标称的距离大多以90%反光率的漫反射物体(如白纸)作为测试基准。实际上,对于深色数据的有效检出也同样是一个重要的性能指标。深色物体因吸收了绝大部分的光能量,要让激光雷达对于深色物体具有和白色物体一样的检出能力是很难的。 官方给出的极限测距能力在0.5m-200m,而实际距离较近时数值波动较大,大于150m时点云也很稀疏,以10%NIST漫反射板为目标测距可达150m。 角分辨率 表中的水平和垂直角分辨率均为0.2°,不同于传统机械式激光雷达的扫描方式,RS-M1采用的扫描方式为多视场螺旋形扫描(我编的词,可能不准确),具体扫描方式见:【RS-M1系列 - 2】RS-M1视场与扫描方式。其角水平/垂直FOV区域的分辨率不是均匀分布的,0.2°为其均值。 回波模式 激光雷达发射出的一个激光脉冲可能会以一个或多个回波的形式返回到激光雷达传感器。任何发射出的激光脉冲在传播时,如果遇到多个反射表面则会被分割成与反射表面一样多的回波。 而回波模式表示激光雷达打出一束激光后可以接收几个回波。 单回波:表示打出1个激光点,激光雷达最多接收1个回波。 双回波:表示打出1个激光点,激光雷达最多接收2个回波。 实物开箱以下为RS-M1(B3)实物开箱: 开箱感受: M1激光雷达约0.73kg,拿在手里沉甸甸的,做工、质感也很好,棱比较尖小心磕着自己哈哈~;电源转接线和数据线的接口都是塑料的,并且很薄,转接器那个小盒子也是很轻的一个塑料盒子(可能为了减重吧),感觉插拔的时候容易弄坏,尽量小心点吧!数据线和电源线给的很长,如果需要在小车等小型设备上运行需要重新买短点的线。 优劣分析 优势: 1、实现智能化,低成本、车规级稳定性、结构精简、体积小、完全嵌入车身,可输出语义级的感知结果(加入AI芯片的版本)。 2、相比同价位机械式,其测距能力更强、固态式使得安装位置不受限、出点数更多,垂直视场角拥有等效125线的扫描效果,线束上媲美目前全球已发布中,最高线束(128线)的机械式激光雷达,垂直角分辨率高。 3、高速运动下性能表现良好(待评估),若选择机械旋转式,则需要选择高线数(64线及以上)产品,对比之下该产品性价比更高。 4、该产品已经量产,并且配装多款车型,售后技术支持完善。劣势 1、价格相对昂贵,不过按目前激光雷达发展的趋势,价格应该会持续下降; 2、由于其独特的扫描方式和小FOV,网上的参考资料(数据包、代码)较少。以上为个人粗浅分析,各位批判性看待。 参考资料回波模式:https://blog.csdn.net/vito0522/article/details/105130059 https://www.163.com/dy/article/GC02R5CK05319UN7.html 速腾聚创官网. |



【本文地址】
今日新闻 |
推荐新闻 |