一种车辆横向载荷转移率计算方法 |
您所在的位置:网站首页 › 载荷转移计算公式是什么 › 一种车辆横向载荷转移率计算方法 |
一种车辆横向载荷转移率计算方法
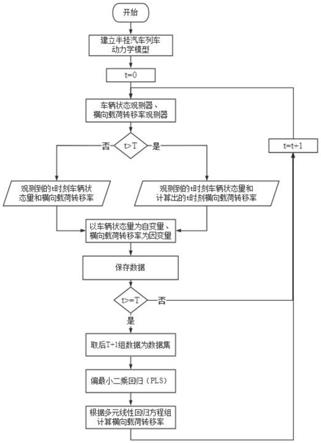 1.本发明涉及一种基于偏最小二乘回归(pls)的半挂汽车列车横向载荷转移率计算方法,属于汽车安全设计领域。 背景技术: 2.半挂汽车列车重心高、重量大、轮距窄,且牵引车和挂车耦合关系复杂,具有后部放大特点,因此其侧翻稳定阈值低,极易发生侧翻。基于静态门限值的侧翻预警方法通过分析车辆侧向加速度、侧倾角等静态指标进行侧翻预警,但其预警精确性不足;基于动态门限值的侧翻预警方法通过考虑车辆实时动力学特性来推算车辆侧翻状态,提高侧翻预警准确性。横向载荷转移率是最常用的动态侧翻预警指标之一,其定义为车辆左右两侧车轮上的垂直受力载荷之差与垂直受力载荷之和的比值,但车轮的垂直受力载荷难以直接测量,无法直接根据其定义计算横向载荷转移率,因此寻找一种能方便、准确的计算横向载荷转移率的方法具有重大意义。 技术实现要素: 3.针对背景技术中的问题,本发明提出了一种基于偏最小二乘回归(pls)的半挂汽车列车横向载荷转移率计算方法,其创新在于:不需要依靠传感器作为车辆状态数据来源,也可以计算出半挂汽车列车横向载荷转移率,为车辆侧翻预警提供准确的侧翻预警指标。4.本发明采取的技术方案是:5.步骤1:将半挂汽车列车分为牵引车和半挂车两部分,分别考虑其状态量和横向载荷转移率;6.步骤2:建立半挂汽车列车动力学模型,并设计车辆状态观测器和横向载荷转移率观测器;7.步骤3:以车辆状态量为自变量,横向载荷转移率为因变量,将0到t时刻自变量和因变量作为pls数据集,对其进行偏最小二乘回归,得到因变量关于自变量的多元线性回归方程组,将t+1时刻车辆状态量代入方程组,计算出t+1时刻的横向载荷转移率;8.步骤4:将1到t+1时刻自变量和因变量作为新的pls数据集,对其进行进行偏最小二乘回归,得到新的因变量关于自变量的多元线性回归方程组,不断迭代时刻,计算出所有时刻横向载荷转移率。9.所述步骤1中,考虑的车辆状态量为牵引车的质心偏角β1、横摆角速度ωr1、侧倾角和半挂车横摆角速度ωr2、侧倾角五个状态量,考虑的横向载荷转移率为牵引车横向载荷转移率ltrc和半挂车横向载荷转移率ltrt。10.所述步骤2中,半挂汽车列车动力学模型为:[0011][0012]将其转换为状态方程标准形式:[0013]式中:式中:[0014][0015]v=[-2k1 0ꢀ‑2a1k1 0 0 0 0 0]t[0016]以上各式中,m1、m2为牵引车、半挂车质量;ωr1、ωr2为牵引车、半挂车横摆角速度;ms1、ms2为牵引车、半挂车簧载质量;为牵引车、半挂车侧倾角;hs1、hs2为牵引车、半挂车质心到侧倾轴线距离;ix1、ix2为牵引车、半挂车绕x轴的转动惯量;ixz1、ixz2为牵引车、半挂车的簧载质量绕重心的横摆侧倾惯性积;iz1、iz2为牵引车、半挂车绕z轴的转动惯量;δ为牵引车前轮转角;g为重力加速度;和为牵引车前轴、后轴和半挂车轴侧倾刚度;和为牵引车前轴、后轴和半挂车轴侧倾阻尼;h1、h2为牵引鞍座到牵引车、半挂车侧倾轴线的距离;a1、b1和c1为牵引车质心到前、后轴和牵引鞍座的距离;b2、c2为半挂车质心到挂车轴、牵引鞍座的距离;k1、k2和k3为牵引车前、后轴和半挂车轴单侧轮胎侧偏刚度。[0017]所述步骤2中,根据现代控制理论的状态方程标准形式:[0018][0019]y=cx+du[0020]令:[0021][0022]d=0[0023]则:[0024]即可构成车辆状态观测器,观测车辆的五个状态量。[0025]所述步骤2中,考虑悬架侧倾刚度和侧倾阻尼系数的基础上建立起车辆力矩平衡方程:[0026][0027]联立:[0028]fzl+fzr=mg[0029][0030]整理可得:[0031][0032]其中m为车的质量,b为轮距,为车身侧倾角,为车轴侧倾刚度,为车轴侧倾阻尼,fzl为车辆左侧车轮上的垂直载荷;fzr为车辆右侧车轮上的垂直载荷。能分别很好地代表x与y中的数据变异信息,根据主成分分析原理,有:[0059]var(t1)→max[0060]var(u1)→max[0061]由于回归建模的需要,要求t1对u1有很大的解释能力,根据典型相关分析的思路,t1与u1的相关度应达到最大值,即:[0062]r(t1,u1)→max[0063]因此,在偏最小二乘回归中要求t1与u1的协方差达到最大,即:[0064][0065]其数学表述应该是求解下列优化问题:[0066]max《e0w1,f0c1》[0067][0068]根据拉格朗日乘数法可得:其中w1是对应于矩阵最大特征值的单位特征向量,c1是对应于矩阵最大特征值的单位特征向量;[0069]求得w1和c1即可得到成分:[0070][0071]分别求e0和f0在t1上的回归方程:[0072][0073]式中,p1,r1是回归系数,即:[0074][0075]记残差矩阵:[0076][0077][0078]③用残差矩阵e1和f1取代e0和f0,循环流程②可得回归方程:[0079][0080]式中,p2,r2是回归系数,即:[0081][0082]④如此计算下去,如果x的秩是a,则有:[0083][0084]由于t1,t2,…,ta是标准化变量的线性组合,因此可以得到标准化后的因变量关于标准化后的自变量的多元线性回归方程组,对其进行反标准化处理,最终可以得到每个因变量yi关于自变量x1,x2,…,xp的多元线性回归方程组。[0085]所述步骤3、4中,偏最小二乘回归得到的多元线性回归方程组形式如下:[0086][0087]其中a0、b0为常数项,a1,a2,…,a5,b1,b2,…,b5为回归系数。[0088]本发明的有益效果是:不需要依靠传感器作为车辆状态数据来源,也可以准确计算出半挂汽车列车横向载荷转移率,为车辆侧翻预警提供准确的侧翻预警指标,减少了车载传感器的数量,节约了成本,且其精确度高于单纯的状态观测器观测值。附图说明[0089]图1、基于偏最小二乘回归(pls)的半挂汽车列车横向载荷转移率计算方法流程图[0090]图2、半挂汽车列车平面运动模型图[0091]图3、牵引车侧倾运动模型图[0092]图4、半挂车侧倾运动模型图[0093]图5、车辆简化侧倾力矩平衡模型图具体实施方式[0094]下面结合附图对本发明的技术方案做进一步的详细说明。[0095]本发明提出了一种基于偏最小二乘回归(pls)的半挂汽车列车横向载荷转移率计算方法,本发明采取的技术方案是:[0096]步骤1:将半挂汽车列车分为牵引车和半挂车两部分,分别考虑其状态量和横向载荷转移率;[0097]步骤2:建立半挂汽车列车动力学模型,并设计车辆状态观测器和横向载荷转移率观测器;[0098]步骤3:以车辆状态量为自变量,横向载荷转移率为因变量,将0到t时刻自变量和因变量作为pls数据集,对其进行偏最小二乘回归,得到因变量关于自变量的多元线性回归方程组,将t+1时刻车辆状态量代入方程组,计算出t+1时刻的横向载荷转移率;[0099]步骤4:将1到t+1时刻自变量和因变量作为新的pls数据集,对其进行进行偏最小二乘回归,得到新的因变量关于自变量的多元线性回归方程组,不断迭代时刻,计算出所有时刻横向载荷转移率。[0100]其技术方案流程框图如图1所示。[0101]所述步骤1中,考虑的车辆状态量为牵引车的质心偏角β1、横摆角速度ωr1、侧倾角和半挂车横摆角速度ωr2、侧倾角五个状态量,考虑的横向载荷转移率为牵引车横向载荷转移率ltrc和半挂车横向载荷转移率ltrt。[0102]所述步骤2中,对建立的半挂汽车列车模型做如下假设:[0103]忽略空气动力学作用;[0104]牵引车驱动轴和挂车轴等效为单轴模型;[0105]忽略地面对车轮的滚动阻力和坡度阻力;[0106]忽略轮胎载荷变化对轮胎回正力矩影响;[0107]纵向速度恒定和铰接角较小;[0108]忽略旋转惯性力矩影响。[0109]根据图2、3、4中半挂汽车列车的受力分析情况,可得牵引车及半挂车的横向、侧倾和横摆方向的动力学微分方程分别为:[0110]牵引车横向运动微分方程[0111][0112]牵引车侧倾运动微分方程[0113][0114]牵引车横摆运动微分方程[0115][0116]半挂车横向运动微分方程[0117][0118]半挂车侧倾运动微分方程[0119][0120]半挂车横摆运动微分方程[0121][0122]假设牵引车与挂车牵引鞍座为刚性连接,则牵引车和挂车纵向速度相等,即vx1=vx2,则牵引车和挂车较接点力耦合方程为:[0123][0124]牵引车与挂车之间连接的铰接角θ满足:[0125][0126]挂车质心侧偏角满足:[0127][0128]其中,fyil、fyir(i=1,2,3)分别为牵引车、半挂车左、右侧轮胎的侧偏力,采用线性轮胎力学模型,当轮胎侧偏角较小时,可处理为侧偏角与侧偏力成线性关系,则其各车轴轮胎的侧偏力分别表示如下:[0129][0130]以上各式中,m1、m2为牵引车、半挂车质量;vy1、vy2为牵引车、半挂车侧向速度;ωr1、ωr2为牵引车、半挂车横摆角速度;ms1、ms2为牵引车、半挂车簧载质量;为牵引车、半挂车侧倾角;hs1、hs2为牵引车、半挂车质心到侧倾轴线距离;ix1、ix2为牵引车、半挂车绕x轴的转动惯量;ixz1、ixz2为牵引车、半挂车的簧载质量绕重心的横摆侧倾惯性积;iz1、iz2为牵引车、半挂车绕z轴的转动惯量;δ为牵引车前轮转角;fax、fay为牵引车的牵引鞍座受到的纵向力与侧向力;ftx、fty为半挂车的牵引销受到的纵向力与侧向力;g为重力加速度;和为牵引车前轴、后轴和半挂车轴侧倾刚度;和为牵引车前轴、后轴和半挂车轴侧倾阻尼;h1、h2为牵引鞍座到牵引车、半挂车侧倾轴线的距离;a1、b1和c1为牵引车质心到前、后轴和牵引鞍座的距离;b2、c2为半挂车质心到挂半车轴、牵引鞍座的距离;k1、k2和k3为牵引车前、后轴和半挂车轴单侧轮胎侧偏刚度;α1、α2和α3为牵引车前、后轴和半挂车轴轮胎侧偏角。[0131]将上述微分方程整理化解并消去fay、fty得到半挂汽车列车动力学模型为:[0132][0133]将其转换为状态方程标准形式:[0134]式中:式中:[0135][0136]v=[-2k1 0ꢀ‑2a1k1 0 0 0 0 0]t[0137]所述步骤2中,根据现代控制理论的状态方程标准形式:[0138][0139]y=cx+du[0140]令:[0141][0142]d=0[0143]则:[0144]即可构成车辆状态观测器,观测车辆的五个状态量。[0145]所述步骤2中,根据图5所示,考虑悬架侧倾刚度和侧倾阻尼系数的基础上建立起车辆力矩平衡方程:[0146][0147]联立:[0148]fzl+fzr=mg[0149][0150]整理可得:[0151][0152]其中m为车的质量,b为轮距,为车身侧倾角,为车轴侧倾刚度,为车轴侧倾阻尼,fzl为车辆左侧车轮上的垂直载荷;fzr为车辆右侧车轮上的垂直载荷。[0153]将牵引车的横向载荷转移率ltrc和半挂车的横向载荷转移率ltrt分别考虑,作为两个指标分别作为牵引车和半挂车的侧翻指标,其可表示为:[0154][0155][0156]其中b1、b2为牵引车、半挂车轮距;[0157]根据现代控制理论的状态方程标准形式:[0158][0159]y=cx+du[0160]构建横向载荷转移率观测器,令:[0161]y=[ltrc ltrt]t[0162]可得:[0163][0164]d=0[0165]即可构成载荷转移率观测器,观测牵引车、半挂车载荷转移率。[0166]所述步骤3中,其自变量为:[0167][0168]因变量为:[0169]y=[ltrc ltrt]t[0170]自变量数据来源为步骤2中所构建的车辆状态观测器,因变量0到t时刻数据来源为步骤2中所构建横向载荷转移率观测器,t时刻后数据来源为根据偏最小二乘回归得到的多元线性回归方程组计算得到。[0171]所述步骤3、4中,自变量数据和因变量数据采样周期相同,一个时刻表示自变量和因变量的一个采样周期。[0172]所述步骤3、4中,偏最小二乘回归建模流程为:[0173]①将x与y进行标准化处理,得到标准化后的自变量矩阵e0和因变量矩阵f0。[0174][0175][0176][0177]式中,是xj的均值,sj是xj的标准差,是yk的均值,sk是yk的标准差。[0178]②从e0中抽取一个主成分t1=e0w1,从f0中抽取一个主成分u1=f0c1,如果要t1和u1能分别很好地代表x与y中的数据变异信息,根据主成分分析原理,有:[0179]var(t1)→max[0180]var(u1)→max[0181]由于回归建模的需要,要求t1对u1有很大的解释能力,根据典型相关分析的思路,t1与u1的相关度应达到最大值,即:[0182]r(t1,u1)→max[0183]因此,在偏最小二乘回归中要求t1与u1的协方差达到最大,即:[0184][0185]其数学表述应该是求解下列优化问题:[0186]max《e0w1,f0c1》[0187][0188]根据拉格朗日乘数法可得:其中w1是对应于矩阵最大特征值的单位特征向量,c1是对应于矩阵最大特征值的单位特征向量。[0189]求得w1和c1即可得到成分:[0190][0191]分别求e0和f0在t1上的回归方程:[0192][0193]式中,p1,r1是回归系数,即:[0194][0195]记残差矩阵:[0196][0197][0198]③用残差矩阵e1和f1取代e0和f0,循环流程②可得回归方程:[0199][0200]式中,p2,r2是回归系数,即:[0201][0202]④如此计算下去,如果x的秩是a,则有:[0203][0204]由于t1,t2,…,ta是标准化变量的线性组合,因此可以得到标准化后的因变量关于标准化后的自变量的多元线性回归方程组,对其进行反标准化处理,最终可以得到每个因变量yi关于自变量x1,x2,…,xp的多元线性回归方程组。[0205]所述步骤3、4中,偏最小二乘回归得到的多元线性回归方程组形式如下:[0206][0207]其中a0、b0为常数项,a1,a2,…,a5,b1,b2,…,b5为回归系数。[0208]本发明的有益效果是:不需要依靠传感器作为车辆状态数据来源,也可以计算出半挂汽车列车横向载荷转移率,为车辆侧翻预警提供准确的侧翻预警指标,减少了车载传感器的数量,节约了成本,且其精确度高于单纯的状态观测器观测值。 |
【本文地址】
今日新闻 |
推荐新闻 |