惯性导航原理(四) |
您所在的位置:网站首页 › 螺旋仪图片 › 惯性导航原理(四) |
惯性导航原理(四)
|
文章目录
惯性器件的误差和标定基础加速度计和陀螺的理论输出加速度计输出陀螺仪输出运动载体上的陀螺输出整理
常用坐标系实用惯性坐标系(i-frame)地心地固坐标系(ECEF, e-frame)导航坐标系(n-frame)IMU坐标系(b-frame)
总结
惯性器件的误差和标定基础
加速度计和陀螺的理论输出
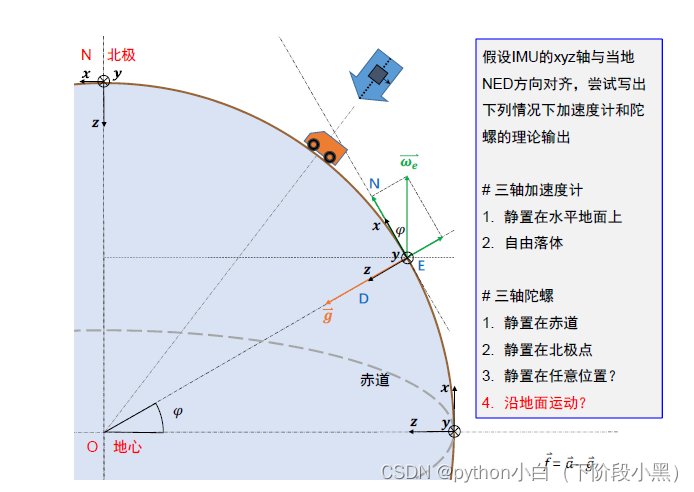
1.当静止不动时,且在赤道或者北极方向,ax=0,ay=0,az=-9.8m/s2 可利用比力公式f=a-g或者下图对加速度计摆放受力分析理解: 假设左为正,下为正(静止不动,受重力,就会有一个-9.8m/s2的输出) 1.当静止不动时,且处于赤道位置,输出为Wie(e系相对于惯性系i系得角速度)=[15°/h;0;0],15°/h指的是图中的x轴,即北向的角速度,地球的自转角速度全部分给了陀螺的北向角速度 2.当静止不动,且处于北极地区时,输出为Wie(e系相对于惯性系i系得角速度)=[0;0;-15°/h] 3.静止在任意一个位置(纬度为phi),输出为Wie(e系相对于惯性系i系得角速度)=[+15°/hcos(phi);0;-15°/hsin(phi)] 注意:东方向在静止时,永远投影不到地球自转 运动载体上的陀螺输出
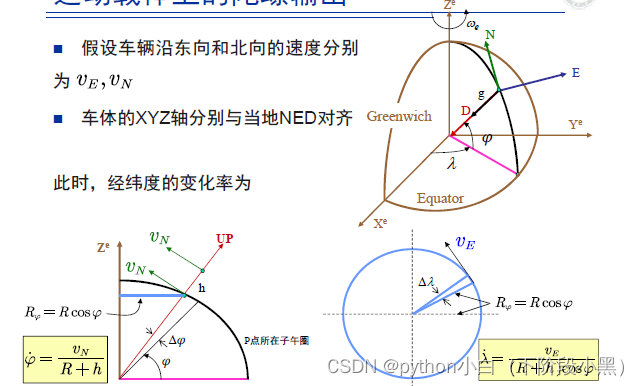
4.当运动起来时,假设朝正北方向跑,假设车子与地心是一个杆臂链接,那么这个正北的运动带来的额外的角速度变化就是在正东方向(右手大拇指外的其余四指绕着运动方向,此时拇指方向就是角速度方向),这个额外的角速度就是-VN/R+h,即速度除以半径等于角速度(此时假设东向为正,而这个角速度指向是指出图片的,也就是西方,因此为-) 5.当运动起来,假设朝正东方向跑,那么实际上是在绕当地纬度圈跑,那么会产生一个和地球自转方向相同的一个额外角速度,-VE/(R+h)cos(phi),速度方向与地轴极轴方向一致 整理
又称当地水平坐标系、地理坐标系;原点在载体上,轴向稳定,指向如下:
NED对应FRD,北东地对应前右下 ENU对应RFU,东北天对应右前上 |
 对上图加速度计和陀螺仪的理想输出进行分析:
对上图加速度计和陀螺仪的理想输出进行分析: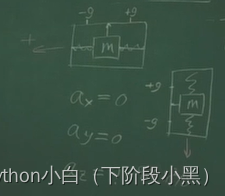
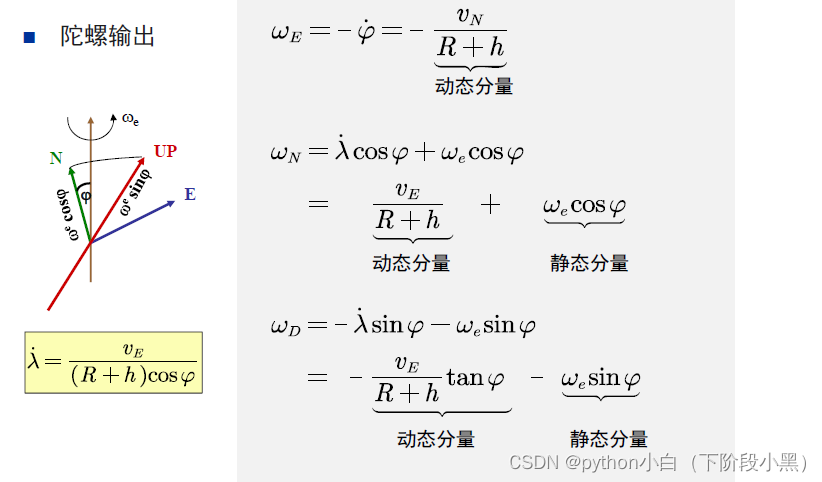 上面的所有结论都是假设的IMU三轴方向一直保持与当地东北天方向一致,没有考虑本身姿态变化;上述结论告诉我们,不管什么时候,陀螺都能感知出角速度,不论静止还是运动;且静态分量大于动态分量。
上面的所有结论都是假设的IMU三轴方向一直保持与当地东北天方向一致,没有考虑本身姿态变化;上述结论告诉我们,不管什么时候,陀螺都能感知出角速度,不论静止还是运动;且静态分量大于动态分量。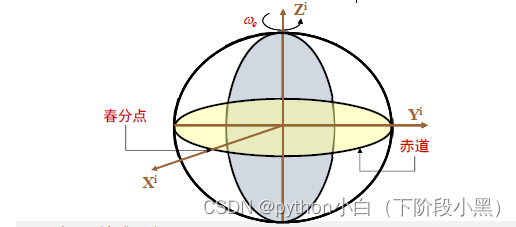 原点:地球质心 z轴:沿地球自转轴方向,从地心指向北极点(协议地极) x轴:在赤道平面内,从地心指向春分点 y轴:与x、z轴构成右手坐标系 总结:不随地球自转的地心地固坐标系
原点:地球质心 z轴:沿地球自转轴方向,从地心指向北极点(协议地极) x轴:在赤道平面内,从地心指向春分点 y轴:与x、z轴构成右手坐标系 总结:不随地球自转的地心地固坐标系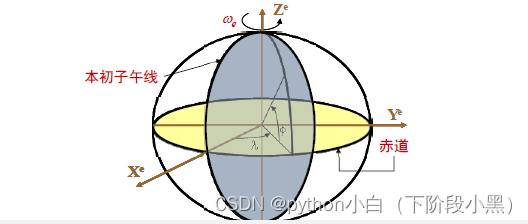 原点:地球质心 z轴:沿地球自转轴方向,从地心指向北极点(协议地极) x轴:在赤道平面内,从地心指向赤道与本初子午线的交点 y轴:位于赤道平面内,与x、z轴构成右手坐标系
原点:地球质心 z轴:沿地球自转轴方向,从地心指向北极点(协议地极) x轴:在赤道平面内,从地心指向赤道与本初子午线的交点 y轴:位于赤道平面内,与x、z轴构成右手坐标系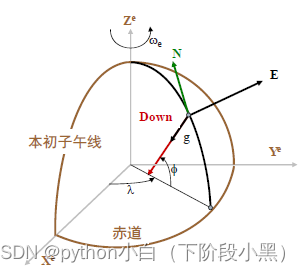 原点:载体中心或参考点 z轴:沿参考椭球的法线方向向下 x轴:参考椭球北向 y轴:参考椭球东向 轴线选取:* N-E-D vs. E-N-U
原点:载体中心或参考点 z轴:沿参考椭球的法线方向向下 x轴:参考椭球北向 y轴:参考椭球东向 轴线选取:* N-E-D vs. E-N-U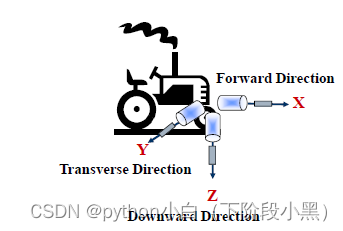 原点:IMU测量中心 x轴:x轴加速度计和陀螺正方向 y轴:y轴加速度计和陀螺正方向 z轴:z轴加速度计和陀螺正方向 轴线选取:R-F-U vs. F-R-D
原点:IMU测量中心 x轴:x轴加速度计和陀螺正方向 y轴:y轴加速度计和陀螺正方向 z轴:z轴加速度计和陀螺正方向 轴线选取:R-F-U vs. F-R-D【本文地址】