线性代数基础 |
您所在的位置:网站首页 › 矩阵的六种运算形式 › 线性代数基础 |
线性代数基础
|
一、向量的基本概念
A. 向量的定义
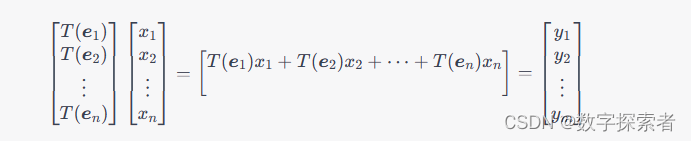
向量是数学中的一个基本概念,它表示在空间中具有大小和方向的量。向量可以用箭头来表示,箭头的长度表示向量的大小(模),箭头的方向表示向量的方向。 在坐标系中,向量通常表示为有序数对 ( x , y ) (x,y) (x,y) 或有序三元组 ( x , y , z ) (x,y,z) (x,y,z),其中 x , y , z x, y, z x,y,z 分别表示向量在 x x x 轴、 y y y 轴、 z z z 轴方向上的大小,也称为向量的分量。向量的长度(模)表示为 ∣ v ∣ |\boldsymbol{v}| ∣v∣,其中 v \boldsymbol{v} v 表示向量。 例如,在二维坐标系中,一个向量 v \boldsymbol{v} v 可以表示为 ( x , y ) (x,y) (x,y) 或 v = x i + y j \boldsymbol{v} = x\boldsymbol{i} + y\boldsymbol{j} v=xi+yj,其中 i \boldsymbol{i} i 和 j \boldsymbol{j} j 分别表示 x x x 轴和 y y y 轴正方向的单位向量。 需要注意的是,向量和标量(单个数值)是不同的概念。标量只有大小,而向量有大小和方向。 B. 向量的表示方法向量有多种表示方法,其中比较常见的有以下几种: 坐标表示法:向量在坐标系中可以表示为一个有序数对、有序三元组等,其中每个分量表示向量在坐标系的各个方向上的大小。箭头表示法:向量可以用箭头来表示,箭头的长度表示向量的大小(模),箭头的方向表示向量的方向。线段表示法:向量也可以表示为起点和终点之间的有向线段,起点表示向量的位置,线段的方向和长度分别表示向量的方向和大小。分解表示法:向量可以分解为若干个基向量的线性组合,其中基向量是指在坐标系中与坐标轴正方向重合的单位向量。矩阵表示法:向量可以表示为一个列向量或行向量的形式,其中列向量是一个 n n n 行 1 1 1 列的矩阵,行向量是一个 1 1 1 行 n n n 列的矩阵。在机器学习中,通常使用矩阵表示法来表示向量,因为矩阵具有更好的运算性质。同时,基向量的线性组合也是机器学习中常见的概念,例如,多元线性回归中就是使用基向量的线性组合来表示数据。 C. 向量的加法和减法向量的加法和减法是向量运算中的基本操作,它们的定义如下: 设 a \boldsymbol{a} a 和 b \boldsymbol{b} b 是两个向量,则它们的和 a + b \boldsymbol{a}+\boldsymbol{b} a+b 和差 a − b \boldsymbol{a}-\boldsymbol{b} a−b 分别定义为: a + b = ( a 1 + b 1 , a 2 + b 2 , ⋯ , a n + b n ) a − b = ( a 1 − b 1 , a 2 − b 2 , ⋯ , a n − b n ) \begin{aligned} \boldsymbol{a}+\boldsymbol{b} &= (a_1+b_1, a_2+b_2, \cdots, a_n+b_n) \\ \boldsymbol{a}-\boldsymbol{b} &= (a_1-b_1, a_2-b_2, \cdots, a_n-b_n) \end{aligned} a+ba−b=(a1+b1,a2+b2,⋯,an+bn)=(a1−b1,a2−b2,⋯,an−bn) 其中 a i a_i ai 和 b i b_i bi 分别表示向量 a \boldsymbol{a} a 和 b \boldsymbol{b} b 在第 i i i 个方向上的分量, n n n 表示向量的维度。需要注意的是,向量加法和减法要求两个向量具有相同的维度。 图示来看,向量加法和减法的几何意义如下: 向量加法:将一个向量平移后叠加在另一个向量上,得到一个新的向量。向量减法:将一个向量平移后以另一个向量的相反方向叠加在另一个向量上,得到一个新的向量。可以使用坐标表示法或箭头表示法来表示向量加法和减法。例如,在二维坐标系中,设向量 a = ( a 1 , a 2 ) \boldsymbol{a}=(a_1,a_2) a=(a1,a2),向量 b = ( b 1 , b 2 ) \boldsymbol{b}=(b_1,b_2) b=(b1,b2),则它们的和可以表示为 a + b = ( a 1 + b 1 , a 2 + b 2 ) \boldsymbol{a}+\boldsymbol{b}=(a_1+b_1, a_2+b_2) a+b=(a1+b1,a2+b2),在坐标系中表示为将向量 b \boldsymbol{b} b 平移后叠加在向量 a \boldsymbol{a} a 上得到的新向量。向量的减法可以表示为 a − b = a + ( − b ) \boldsymbol{a}-\boldsymbol{b}=\boldsymbol{a}+(-\boldsymbol{b}) a−b=a+(−b),其中 − b -\boldsymbol{b} −b 表示向量 b \boldsymbol{b} b 的相反向量。 B. 向量的数量积和向量积向量的数量积和向量积是向量运算中的两种常见操作,它们分别表示为: 向量的数量积:也称为点积或内积,表示为 a ⋅ b \boldsymbol{a}\cdot\boldsymbol{b} a⋅b,定义为:a ⋅ b = a 1 b 1 + a 2 b 2 + ⋯ + a n b n = ∑ i = 1 n a i b i \boldsymbol{a}\cdot\boldsymbol{b} = a_1b_1+a_2b_2+\cdots+a_nb_n = \sum_{i=1}^na_ib_i a⋅b=a1b1+a2b2+⋯+anbn=i=1∑naibi 其中 a i a_i ai 和 b i b_i bi 分别表示向量 a \boldsymbol{a} a 和 b \boldsymbol{b} b 在第 i i i 个方向上的分量, n n n 表示向量的维度。向量的数量积是一个标量,表示为两个向量在空间中的夹角的余弦值乘上它们的模长之积,即 a ⋅ b = ∣ a ∣ ∣ b ∣ cos θ \boldsymbol{a}\cdot\boldsymbol{b}=|\boldsymbol{a}||\boldsymbol{b}|\cos\theta a⋅b=∣a∣∣b∣cosθ,其中 θ \theta θ 表示 a \boldsymbol{a} a 和 b \boldsymbol{b} b 之间的夹角。 向量的向量积:也称为叉积或外积,表示为 a × b \boldsymbol{a}\times\boldsymbol{b} a×b,定义为:a × b = ∣ i j k a 1 a 2 a 3 b 1 b 2 b 3 ∣ = ( a 2 b 3 − a 3 b 2 ) i + ( a 3 b 1 − a 1 b 3 ) j + ( a 1 b 2 − a 2 b 1 ) k \boldsymbol{a}\times\boldsymbol{b} = \begin{vmatrix} \boldsymbol{i} & \boldsymbol{j} & \boldsymbol{k} \\ a_1 & a_2 & a_3 \\ b_1 & b_2 & b_3 \\ \end{vmatrix} = (a_2b_3-a_3b_2)\boldsymbol{i}+(a_3b_1-a_1b_3)\boldsymbol{j}+(a_1b_2-a_2b_1)\boldsymbol{k} a×b= ia1b1ja2b2ka3b3 =(a2b3−a3b2)i+(a3b1−a1b3)j+(a1b2−a2b1)k 其中 i \boldsymbol{i} i, j \boldsymbol{j} j 和 k \boldsymbol{k} k 分别表示坐标系的三个基向量, a i a_i ai 和 b i b_i bi 分别表示向量 a \boldsymbol{a} a 和 b \boldsymbol{b} b 在第 i i i 个方向上的分量, 3 3 3 表示向量的维度。向量的向量积是一个向量,其方向垂直于向量 a \boldsymbol{a} a 和 b \boldsymbol{b} b 所在的平面,其大小等于两个向量构成的平行四边形的面积。 需要注意的是,向量的数量积和向量积只能在三维及以上的空间中进行定义,而在二维空间中不存在向量的向量积。此外,向量的数量积和向量积的运算法则具有一定的几何意义,在许多应用中都有着重要的作用。 D. 向量的模和方向角向量的模和方向角是描述向量的两个重要属性,它们分别表示为: 向量的模:向量的模也称为向量的长度,表示为 ∣ a ∣ |\boldsymbol{a}| ∣a∣,定义为:∣ a ∣ = a 1 2 + a 2 2 + ⋯ + a n 2 = ∑ i = 1 n a i 2 |\boldsymbol{a}| = \sqrt{a_1^2+a_2^2+\cdots+a_n^2} = \sqrt{\sum_{i=1}^na_i^2} ∣a∣=a12+a22+⋯+an2 =i=1∑nai2 其中 a i a_i ai 表示向量 a \boldsymbol{a} a 在第 i i i 个方向上的分量, n n n 表示向量的维度。向量的模是一个标量,表示向量的大小或长度。 向量的方向角:向量的方向角表示向量与某个坐标轴或平面之间的夹角,通常用极角(也称为极角)和方位角(也称为方向角)表示。在二维直角坐标系中,向量的方向角等于向量与 x x x 轴之间的夹角,可以表示为 θ = arctan y x \theta=\arctan\frac{y}{x} θ=arctanxy。在三维直角坐标系中,向量的方向角可以用极角和方位角表示。其中,极角表示向量与 z z z 轴之间的夹角,通常用 ϕ \phi ϕ 表示,可以表示为 ϕ = arccos a z ∣ a ∣ \phi=\arccos\frac{a_z}{|\boldsymbol{a}|} ϕ=arccos∣a∣az。方位角表示向量在 x − y x-y x−y 平面上的投影与 x x x 轴之间的夹角,通常用 θ \theta θ 表示,可以表示为 θ = arctan a y a x \theta=\arctan\frac{a_y}{a_x} θ=arctanaxay。 二、矩阵的基本概念 A. 矩阵的定义矩阵是一个由 m m m 行 n n n 列元素排列成的矩形阵列,可以表示为: A = [ a 11 a 12 ⋯ a 1 n a 21 a 22 ⋯ a 2 n ⋮ ⋮ ⋱ ⋮ a m 1 a m 2 ⋯ a m n ] \boldsymbol{A} = \begin{bmatrix} a_{11} & a_{12} & \cdots & a_{1n} \\ a_{21} & a_{22} & \cdots & a_{2n} \\ \vdots & \vdots & \ddots & \vdots \\ a_{m1} & a_{m2} & \cdots & a_{mn} \end{bmatrix} A= a11a21⋮am1a12a22⋮am2⋯⋯⋱⋯a1na2n⋮amn 其中 a i j a_{ij} aij 表示矩阵 A \boldsymbol{A} A 中第 i i i 行第 j j j 列的元素。矩阵的大小为 m × n m\times n m×n,其中 m m m 表示矩阵的行数, n n n 表示矩阵的列数。 矩阵可以用于表示线性变换、解线性方程组、表示多项式等等。在机器学习和深度学习中,矩阵也是非常重要的数据结构之一,常用于表示样本数据和模型参数。 B. 矩阵的运算:加法、数乘和乘法矩阵的运算包括加法、数乘和乘法,它们的定义如下: 矩阵加法:设有两个 m × n m\times n m×n 的矩阵 A \boldsymbol{A} A 和 B \boldsymbol{B} B,则它们的和 A + B \boldsymbol{A}+\boldsymbol{B} A+B 定义为一个 m × n m\times n m×n 的矩阵,其每个元素都等于相应位置上 A \boldsymbol{A} A 和 B \boldsymbol{B} B 中对应元素的和,即:( A + B ) i j = a i j + b i j (\boldsymbol{A}+\boldsymbol{B})_{ij} = a_{ij}+b_{ij} (A+B)ij=aij+bij 矩阵数乘:设有一个标量 k k k 和一个 m × n m\times n m×n 的矩阵 A \boldsymbol{A} A,则它们的积 k A k\boldsymbol{A} kA 定义为一个 m × n m\times n m×n 的矩阵,其每个元素都等于相应位置上 A \boldsymbol{A} A 中对应元素乘以 k k k 的结果,即:( k A ) i j = k a i j (k\boldsymbol{A})_{ij} = ka_{ij} (kA)ij=kaij 矩阵乘法:设有两个矩阵 A \boldsymbol{A} A 和 B \boldsymbol{B} B,如果 A \boldsymbol{A} A 的列数等于 B \boldsymbol{B} B 的行数,则它们的乘积 A B \boldsymbol{A}\boldsymbol{B} AB 定义为一个 m × p m\times p m×p 的矩阵,其中第 i i i 行第 j j j 列的元素为:( A B ) i j = ∑ k = 1 n a i k b k j (\boldsymbol{A}\boldsymbol{B})_{ij} = \sum_{k=1}^na_{ik}b_{kj} (AB)ij=k=1∑naikbkj 其中 m m m 表示 A \boldsymbol{A} A 的行数, n n n 表示 A \boldsymbol{A} A 的列数, p p p 表示 B \boldsymbol{B} B 的列数。需要注意的是,矩阵乘法不满足交换律,即一般情况下 A B ≠ B A \boldsymbol{A}\boldsymbol{B}\neq\boldsymbol{B}\boldsymbol{A} AB=BA。 矩阵的加法和数乘都是逐个对应元素进行操作,因此也称为元素级别的操作。矩阵乘法可以看做是一种特殊的线性变换,它将一个矩阵映射为另一个矩阵,是线性代数中非常重要的运算。 C. 矩阵的转置和逆矩阵的转置和逆是矩阵运算中比较重要的概念,它们的定义如下: 矩阵转置:设有一个 m × n m\times n m×n 的矩阵 A \boldsymbol{A} A,则它的转置 A T \boldsymbol{A}^T AT 是一个 n × m n\times m n×m 的矩阵,其每个元素满足:( A T ) i j = a j i (\boldsymbol{A}^T)_{ij} = a_{ji} (AT)ij=aji 即将矩阵 A \boldsymbol{A} A 的行和列交换,得到的新矩阵就是 A \boldsymbol{A} A 的转置矩阵。 矩阵逆:设有一个 n × n n\times n n×n 的方阵 A \boldsymbol{A} A,如果存在一个 n × n n\times n n×n 的方阵 B \boldsymbol{B} B,满足:A B = B A = I \boldsymbol{A}\boldsymbol{B} = \boldsymbol{B}\boldsymbol{A} = \boldsymbol{I} AB=BA=I 其中 I \boldsymbol{I} I 是 n × n n\times n n×n 的单位矩阵,则称矩阵 A \boldsymbol{A} A 可逆,并且称矩阵 B \boldsymbol{B} B 是 A \boldsymbol{A} A 的逆矩阵,记作 A − 1 \boldsymbol{A}^{-1} A−1。需要注意的是,只有方阵才有逆矩阵。 矩阵转置和逆矩阵是矩阵运算中非常重要的概念。矩阵转置可以将矩阵行和列的顺序交换,方便进行某些运算。矩阵逆是线性代数中一个非常重要的概念,它可以用来解线性方程组、求解最小二乘问题等等。如果一个矩阵不可逆,则称该矩阵是奇异的。 D. 矩阵的秩和行列式矩阵的秩和行列式是矩阵运算中比较重要的概念,它们的定义如下: 矩阵秩:设有一个 m × n m\times n m×n 的矩阵 A \boldsymbol{A} A,如果矩阵 A \boldsymbol{A} A 的秩为 r r r,则称 A \boldsymbol{A} A 是一个秩为 r r r 的矩阵,记作 rank ( A ) = r \operatorname{rank}(\boldsymbol{A})=r rank(A)=r。矩阵的秩表示矩阵中线性无关的行或列的最大数量。 矩阵行列式:设有一个 n × n n\times n n×n 的方阵 A \boldsymbol{A} A,则它的行列式 det ( A ) \det(\boldsymbol{A}) det(A) 是一个标量值,其计算方式如下: det ( A ) = ∑ σ ∈ S n ( − 1 ) sgn ( σ ) a 1 σ ( 1 ) a 2 σ ( 2 ) ⋯ a n σ ( n ) \det(\boldsymbol{A}) = \sum_{\sigma\in S_n} (-1)^{\operatorname{sgn}(\sigma)} a_{1\sigma(1)}a_{2\sigma(2)}\cdots a_{n\sigma(n)} det(A)=σ∈Sn∑(−1)sgn(σ)a1σ(1)a2σ(2)⋯anσ(n) 其中 S n S_n Sn 是 n n n 个元素的置换群, σ \sigma σ 是其中的一个置换, sgn ( σ ) \operatorname{sgn}(\sigma) sgn(σ) 是置换 σ \sigma σ 的符号(即逆序数的奇偶性), a i σ ( i ) a_{i\sigma(i)} aiσ(i) 表示矩阵 A \boldsymbol{A} A 中第 i i i 行 σ ( i ) \sigma(i) σ(i) 列的元素。 矩阵秩和行列式是矩阵运算中非常重要的概念。矩阵秩可以用于判断矩阵中行或列的线性无关性,从而帮助我们解决线性方程组的问题。矩阵行列式是一个重要的标量值,可以用于判断矩阵是否可逆,从而帮助我们解决一些与矩阵逆有关的问题。 三、向量空间与线性变换 A. 向量空间的定义和性质向量空间是一种数学结构,它由一组向量和一些运算构成。向量空间的定义如下: 设 V V V 是一个非空集合, F F F 是一个数域,如果对于 V V V 中的任意两个元素 u \boldsymbol{u} u 和 v \boldsymbol{v} v,以及 F F F 中的任意一个元素 k k k,定义了 V V V 上的加法和数乘两种运算,使得对于任意 u \boldsymbol{u} u, v \boldsymbol{v} v 和 w \boldsymbol{w} w,以及任意 k k k 和 l l l,满足以下八条性质: 加法满足交换律,即 u + v = v + u \boldsymbol{u}+\boldsymbol{v}=\boldsymbol{v}+\boldsymbol{u} u+v=v+u;加法满足结合律,即 ( u + v ) + w = u + ( v + w ) (\boldsymbol{u}+\boldsymbol{v})+\boldsymbol{w}=\boldsymbol{u}+(\boldsymbol{v}+\boldsymbol{w}) (u+v)+w=u+(v+w);存在一个元素 0 ∈ V \boldsymbol{0}\in V 0∈V,使得对于任意 u ∈ V \boldsymbol{u}\in V u∈V,有 u + 0 = u \boldsymbol{u}+\boldsymbol{0}=\boldsymbol{u} u+0=u;对于任意 u ∈ V \boldsymbol{u}\in V u∈V,存在元素 − u ∈ V -\boldsymbol{u}\in V −u∈V,使得 u + ( − u ) = 0 \boldsymbol{u}+(-\boldsymbol{u})=\boldsymbol{0} u+(−u)=0;数乘满足结合律,即 k ( l u ) = ( k l ) u k(l\boldsymbol{u})=(kl)\boldsymbol{u} k(lu)=(kl)u;数乘满足分配律,即 ( k + l ) u = k u + l u (k+l)\boldsymbol{u}=k\boldsymbol{u}+l\boldsymbol{u} (k+l)u=ku+lu;数乘满足分配律,即 k ( u + v ) = k u + k v k(\boldsymbol{u}+\boldsymbol{v})=k\boldsymbol{u}+k\boldsymbol{v} k(u+v)=ku+kv;对于任意 u ∈ V \boldsymbol{u}\in V u∈V,有 1 u = u 1\boldsymbol{u}=\boldsymbol{u} 1u=u。则称 V V V 是一个向量空间, F F F 是向量空间 V V V 的数域。 向量空间具有以下基本性质: 向量空间中的元素称为向量;向量空间中的加法满足交换律、结合律和存在加法逆元;向量空间中的数乘满足分配律和结合律;向量空间中的数乘分配于加法,即 k ( u + v ) = k u + k v k(\boldsymbol{u}+\boldsymbol{v})=k\boldsymbol{u}+k\boldsymbol{v} k(u+v)=ku+kv 和 ( k + l ) u = k u + l u (k+l)\boldsymbol{u}=k\boldsymbol{u}+l\boldsymbol{u} (k+l)u=ku+lu;向量空间中有一个零向量,使得对于任何向量 u \boldsymbol{u} u,有 u + 0 = u \boldsymbol{u}+\boldsymbol{0}=\boldsymbol{u} u+0=u;向量空间中的加法和数乘都满足分配律,即 ( k + l ) u = k u + l u (k+l)\boldsymbol{u}=k\boldsymbol{u}+l\boldsymbol{u} (k+l)u=ku+lu 和 k ( u + v ) = k u + k v k(\boldsymbol{u}+\boldsymbol{v})=k\boldsymbol{u}+k\boldsymbol{v} k(u+v)=ku+kv;向量空间中的每个向量都有一个加法逆元素 − u -\boldsymbol{u} −u,使得 u + ( − u ) = 0 \boldsymbol{u}+(-\boldsymbol{u})=\boldsymbol{0} u+(−u)=0;向量空间中的数乘具有单位元,即 1 u = u 1\boldsymbol{u}=\boldsymbol{u} 1u=u;向量空间中的向量可以进行加法和数乘运算。向量空间是许多数学领域中的重要概念,如线性代数、微积分、拓扑学等。 B. 线性变换的定义和性质线性变换是一种将一个向量空间映射到另一个向量空间的映射,它满足以下两个条件: 对于任意向量 u , v \boldsymbol{u}, \boldsymbol{v} u,v 和标量 k k k,都有 T ( u + v ) = T ( u ) + T ( v ) T(\boldsymbol{u} + \boldsymbol{v}) = T(\boldsymbol{u}) + T(\boldsymbol{v}) T(u+v)=T(u)+T(v) 和 T ( k u ) = k T ( u ) T(k\boldsymbol{u}) = kT(\boldsymbol{u}) T(ku)=kT(u)。线性变换必须将零向量 0 \boldsymbol{0} 0 映射为零向量 0 \boldsymbol{0} 0。线性变换的性质包括: 线性变换在向量加法和数乘下是保持的。线性变换将原空间的线性相关向量映射到目标空间的线性相关向量,将线性无关向量映射为线性无关向量。线性变换将原空间中的基向量映射为目标空间中的基向量。线性变换将原空间中的任何向量映射为目标空间中的一个向量。线性变换在许多数学领域中都有广泛应用,如线性代数、微积分、信号处理等。 C. 线性变换的矩阵表示线性变换可以通过矩阵进行表示。设 T T T 是一个将 n n n 维向量空间 V V V 映射到 m m m 维向量空间 W W W 的线性变换, { e 1 , e 2 , … , e n } \{\boldsymbol{e}_1,\boldsymbol{e}_2,\dots,\boldsymbol{e}_n\} {e1,e2,…,en} 和 { f 1 , f 2 , … , f m } \{\boldsymbol{f}_1,\boldsymbol{f}_2,\dots,\boldsymbol{f}_m\} {f1,f2,…,fm} 是 V V V 和 W W W 中的基向量,则 T T T 可以表示为一个 m × n m \times n m×n 的矩阵 A A A,其中 A A A 的第 j j j 列表示 T ( e j ) T(\boldsymbol{e}_j) T(ej) 在 { f 1 , f 2 , … , f m } \{\boldsymbol{f}_1,\boldsymbol{f}_2,\dots,\boldsymbol{f}_m\} {f1,f2,…,fm} 下的坐标。 具体地,设 v = x 1 e 1 + x 2 e 2 + ⋯ + x n e n \boldsymbol{v} = x_1\boldsymbol{e}_1 + x_2\boldsymbol{e}_2 + \cdots + x_n\boldsymbol{e}_n v=x1e1+x2e2+⋯+xnen 是 V V V 中的一个向量,则 T ( v ) T(\boldsymbol{v}) T(v) 在基 { f 1 , f 2 , … , f m } \{\boldsymbol{f}_1,\boldsymbol{f}_2,\dots,\boldsymbol{f}_m\} {f1,f2,…,fm} 下的坐标是矩阵向量乘积:
其中 y 1 , y 2 , … , y m y_1,y_2,\dots,y_m y1,y2,…,ym 分别是 T ( v ) T(\boldsymbol{v}) T(v) 在基 { f 1 , f 2 , … , f m } \{\boldsymbol{f}_1,\boldsymbol{f}_2,\dots,\boldsymbol{f}_m\} {f1,f2,…,fm} 下的坐标。 矩阵 A A A 的第 j j j 列就是 T ( e j ) T(\boldsymbol{e}_j) T(ej) 在基 { f 1 , f 2 , … , f m } \{\boldsymbol{f}_1,\boldsymbol{f}_2,\dots,\boldsymbol{f}_m\} {f1,f2,…,fm} 下的坐标,因此有: A = [ ∣ ∣ ∣ T ( e 1 ) T ( e 2 ) ⋯ T ( e n ) ∣ ∣ ∣ ] f 1 f 2 ⋯ f m A = \begin{bmatrix} \vert & \vert & & \vert \\ T(\boldsymbol{e}_1) & T(\boldsymbol{e}_2) & \cdots & T(\boldsymbol{e}_n) \\ \vert & \vert & & \vert \end{bmatrix} \begin{matrix} \\ \boldsymbol{f}_1 \\ \\ \end{matrix} \begin{matrix} \\ \boldsymbol{f}_2 \\ \\ \end{matrix} \cdots \begin{matrix} \\ \boldsymbol{f}_m \\ \\ \end{matrix} A= ∣T(e1)∣∣T(e2)∣⋯∣T(en)∣ f1f2⋯fm 注意到矩阵 A A A 的第 j j j 列可以看作是将 e j \boldsymbol{e}_j ej 映射为 f 1 , f 2 , … , f m \boldsymbol{f}_1,\boldsymbol{f}_2,\dots,\boldsymbol{f}_m f1,f2,…,fm 中各个向量的系数,因此矩阵乘法 A x A\boldsymbol{x} Ax 可以看作是将向量 x \boldsymbol{x} x 在基 { e 1 , e 2 , … , e n } \{\boldsymbol{e}_1,\boldsymbol{e}_2,\dots,\boldsymbol{e}_n\} {e1,e2,…,en} 下的坐标,通过线性变换 T T T 转换为基 { f 1 , f 2 , … , f m } \{\boldsymbol{f}_1,\boldsymbol{f}_2,\dots,\boldsymbol{f}_m\} {f1,f2,…,fm} 下的坐标。 因此,对于任意向量 v \boldsymbol{v} v,都有: [ T ( v ) ] { f 1 , f 2 , … , f m } = A [ v ] { e 1 , e 2 , … , e n } [T(\boldsymbol{v})]_{\{\boldsymbol{f}_1,\boldsymbol{f}_2,\dots,\boldsymbol{f}_m\}} = A [\boldsymbol{v}]_{\{\boldsymbol{e}_1,\boldsymbol{e}_2,\dots,\boldsymbol{e}_n\}} [T(v)]{f1,f2,…,fm}=A[v]{e1,e2,…,en} 其中 [ v ] { e 1 , e 2 , … , e n } [\boldsymbol{v}]_{\{\boldsymbol{e}_1,\boldsymbol{e}_2,\dots,\boldsymbol{e}_n\}} [v]{e1,e2,…,en} 和 [ T ( v ) ] { f 1 , f 2 , … , f m } [T(\boldsymbol{v})]_{\{\boldsymbol{f}_1,\boldsymbol{f}_2,\dots,\boldsymbol{f}_m\}} [T(v)]{f1,f2,…,fm} 分别是向量 v \boldsymbol{v} v 在基 { e 1 , e 2 , … , e n } \{\boldsymbol{e}_1,\boldsymbol{e}_2,\dots,\boldsymbol{e}_n\} {e1,e2,…,en} 和 T ( v ) T(\boldsymbol{v}) T(v) 在基 { f 1 , f 2 , … , f m } \{\boldsymbol{f}_1,\boldsymbol{f}_2,\dots,\boldsymbol{f}_m\} {f1,f2,…,fm} 下的坐标。 因此,矩阵 A A A 也被称为线性变换 T T T 的标准矩阵,表示在基 { e 1 , e 2 , … , e n } \{\boldsymbol{e}_1,\boldsymbol{e}_2,\dots,\boldsymbol{e}_n\} {e1,e2,…,en} 下, T T T 的向量表示的系数矩阵。 D. 线性变换的特征值和特征向量对于线性变换 T T T,如果存在标量 λ \lambda λ 和非零向量 v \boldsymbol{v} v,满足: T ( v ) = λ v T(\boldsymbol{v}) = \lambda \boldsymbol{v} T(v)=λv 则称 λ \lambda λ 是线性变换 T T T 的特征值, v \boldsymbol{v} v 是线性变换 T T T 的对应于特征值 λ \lambda λ 的特征向量。 可以证明,对于特征向量 v \boldsymbol{v} v,如果 T ( v ) = λ v T(\boldsymbol{v}) = \lambda \boldsymbol{v} T(v)=λv,那么对于任意实数 k k k,都有 T ( k v ) = λ ( k v ) T(k\boldsymbol{v}) = \lambda (k\boldsymbol{v}) T(kv)=λ(kv),也就是说, k v k\boldsymbol{v} kv 仍然是 T T T 的特征向量,对应的特征值仍然是 λ \lambda λ。因此,特征向量是由一个特征向量生成的一维向量空间上的所有向量。 特征值和特征向量可以用于矩阵的对角化,即将矩阵表示为对角矩阵的形式,使得矩阵的主对角线上是特征值。具体来说,设 A A A 是一个 n × n n\times n n×n 的矩阵,如果存在一个可逆矩阵 P P P,使得 P − 1 A P P^{-1}AP P−1AP 是一个对角矩阵,那么 P − 1 A P P^{-1}AP P−1AP 的主对角线上的元素就是 A A A 的特征值,对应的 P P P 的列向量就是 A A A 的特征向量。 对角化的一个重要应用是矩阵的幂运算,如果矩阵 A A A 可对角化为 P − 1 A P = d i a g ( λ 1 , λ 2 , … , λ n ) P^{-1}AP=\mathrm{diag}(\lambda_1,\lambda_2,\dots,\lambda_n) P−1AP=diag(λ1,λ2,…,λn),那么矩阵 A A A 的幂可以写成: A k = ( P − 1 A P ) k = P − 1 A k P = P − 1 d i a g ( λ 1 k , λ 2 k , … , λ n k ) P A^k = (P^{-1}AP)^k = P^{-1}A^kP = P^{-1}\mathrm{diag}(\lambda_1^k,\lambda_2^k,\dots,\lambda_n^k)P Ak=(P−1AP)k=P−1AkP=P−1diag(λ1k,λ2k,…,λnk)P 这个式子可以更方便地计算矩阵的幂,特别是在计算大矩阵幂时。 四、向量和矩阵在机器学习中的应用 A. 数据的表示:向量和矩阵向量和矩阵是机器学习中最基础的数据表示方式之一,几乎所有的机器学习算法都是以向量和矩阵为输入和输出的。在机器学习中,数据通常是以向量的形式表示,每个样本用一个特征向量表示,而特征向量中的每个分量则代表一个特征,比如图像数据可以表示成像素强度的向量,文本数据可以表示成词频向量等。在这些向量构成的向量空间中,机器学习算法通过对向量空间的数学操作来对数据进行处理和学习。 而矩阵则更多地用于描述多个样本的特征,比如在神经网络中,多个样本的输入数据可以用一个矩阵表示,其中每行代表一个样本的特征向量。矩阵在机器学习中的应用非常广泛,比如在深度学习中,神经网络的每一层都可以表示为一个矩阵,每个神经元可以看成是一个特定的权重矩阵。此外,矩阵还可以表示协方差矩阵、转移矩阵等。 在机器学习中,向量和矩阵的运算也非常重要。比如,向量的点积、向量的模长、矩阵的转置、矩阵的逆等都是机器学习中经常用到的操作。此外,矩阵的特征值和特征向量也广泛用于机器学习中的降维、聚类等算法中。 总之,向量和矩阵是机器学习中最基础的数据表示方式,它们不仅能够方便地表示数据,而且可以通过向量和矩阵的运算来实现对数据的处理和学习。 B. 线性回归和矩阵求解在机器学习中,线性回归是一种常用的算法,而向量和矩阵的运算则是线性回归的关键。在线性回归中,我们通常使用向量和矩阵来表示样本和模型参数,并使用矩阵求解来计算模型参数的最优解。 具体来说,在线性回归中,我们用一个向量 x x x表示一个样本的特征,用向量 y y y表示该样本的标签。模型的参数用向量 θ \theta θ表示,模型可以表示为 h θ ( x ) = θ T x h_{\theta}(x)=\theta^Tx hθ(x)=θTx。线性回归的目标是找到一组最优的模型参数 θ \theta θ,使得模型 h θ ( x ) h_{\theta}(x) hθ(x)与真实标签 y y y的误差最小化。 将所有的样本数据表示为矩阵 X X X和标签向量 y y y,则线性回归的最优解可以通过矩阵求解的方式求得。具体来说,我们可以通过最小二乘法来求解最优解,即: θ = ( X T X ) − 1 X T y \theta = (X^TX)^{-1}X^Ty θ=(XTX)−1XTy 其中, ( X T X ) − 1 (X^TX)^{-1} (XTX)−1为矩阵 X T X X^TX XTX的逆矩阵, X T X^T XT为矩阵 X X X的转置矩阵。 除了线性回归外,矩阵求解还可以应用于其他机器学习算法中。比如,在深度学习中,反向传播算法中的梯度计算和权重更新都可以通过矩阵求解来实现。此外,在机器学习中,矩阵求解还可以用于矩阵分解、最优化问题等。 因此,向量和矩阵在机器学习中的应用非常广泛,它们不仅能够方便地表示数据和模型参数,而且可以通过矩阵求解等数学方法来实现对数据的处理和学习。 C. 主成分分析(PCA)和特征向量主成分分析(PCA)是一种常用的降维算法,它的核心就是使用特征向量和矩阵运算来实现数据的降维。具体来说,PCA可以通过以下几个步骤来实现: 去中心化:对数据进行中心化处理,即对每个特征减去该特征的均值。计算协方差矩阵:对去中心化后的数据计算协方差矩阵,该矩阵反映了不同特征之间的关系。特征值分解:对协方差矩阵进行特征值分解,得到特征值和特征向量。选择主成分:根据特征值的大小,选择前k个特征向量作为新的基向量,将原始数据投影到这个新的子空间中,实现降维。在PCA算法中,特征向量和特征值起着非常重要的作用。特征向量是一个向量,它在矩阵变换后只发生长度的变化而不发生方向的变化;而特征值则是对应于特征向量的标量,表示矩阵变换在该方向上的伸缩程度。 在PCA算法中,特征向量表示了数据在新的子空间中的基向量,而特征值则表示了每个新的基向量对应的方差大小,即新的子空间中每个维度的重要性大小。通过选择最大的k个特征值对应的特征向量,我们就可以得到一个新的k维子空间,将原始数据投影到这个新的子空间中,从而实现数据的降维。 总的来说,向量和矩阵在机器学习中的应用非常广泛,不仅可以方便地表示数据和模型参数,还可以通过矩阵运算和特征分解等数学方法来实现数据的降维、特征提取、模型优化等任务。 D. 矩阵分解和推荐系统在机器学习中,矩阵分解是一个非常重要的技术。它可以用于许多任务,包括推荐系统、文本分析、图像处理等。 推荐系统通常使用矩阵分解来预测用户可能喜欢的产品或服务。这可以通过将用户-产品矩阵分解为用户特征和产品特征矩阵来实现。通过这种方式,推荐系统可以预测未被用户评价的产品或服务的评分,并向用户推荐他们可能感兴趣的产品或服务。 另一个使用矩阵分解的示例是文本分析。文本可以表示为单词-文档矩阵,其中每行代表一个单词,每列代表一个文档。这个矩阵可以分解为单词特征和文档特征矩阵。通过这种方式,可以对文档进行分类、聚类或提取主题等。 图像处理也使用了矩阵分解。图像可以表示为像素矩阵,可以通过将像素矩阵分解为基础特征和权重矩阵来实现。这可以用于图像压缩、去噪或增强等。 总之,矩阵分解是一种非常强大的工具,可以应用于许多机器学习任务中,例如推荐系统、文本分析和图像处理等。 |
【本文地址】
今日新闻 |
推荐新闻 |