工业机器人运动轨迹规划方法简述 |
您所在的位置:网站首页 › 机器人绘制五角星轨迹路径 › 工业机器人运动轨迹规划方法简述 |
工业机器人运动轨迹规划方法简述
|
文章目录
工业机器人的运动轨迹
关节空间运动规划
3次多项式插值
过路径点的3次多项式插值
高阶多项式插值
用抛物线过渡的线性插值
过路径点的抛物线过渡线性插值
B样条插值
笛卡尔空间运动规划
位置规划
姿态规划
SE(3) 规划
笛卡尔路径的几何问题
工业机器人的运动轨迹
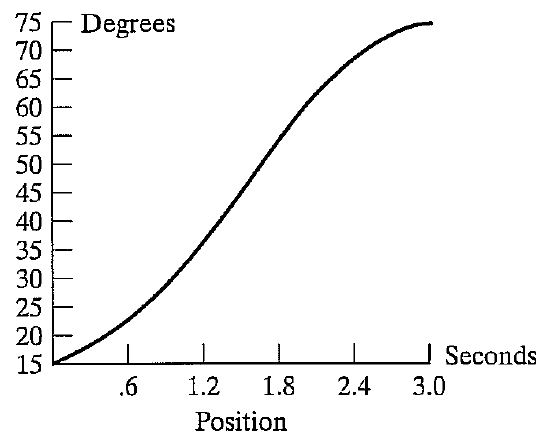
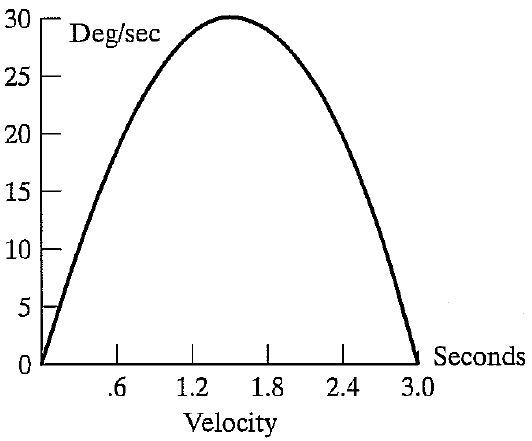
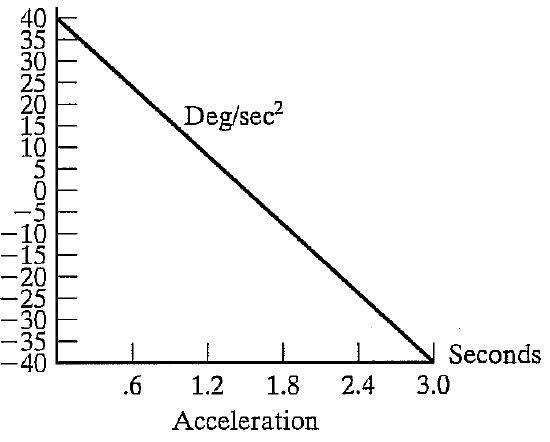
一般而言,运动包括工具相对于工作台的姿态变化和位置变化。 关节空间运动规划目标:使关节空间轨迹平滑。 一般情况下,关节空间的规划方法便于计算,并且由于关节空间与笛卡尔空间之间并不存在连续的对应关系,因而不会发生机构的奇异性问题。 3次多项式插值做如下假设:某个关节从 t 0 t_{0} t0 时刻的位置 q 0 q_{0} q0 运动到 t f t_{f} tf 时刻的位置 q f q_{f} qf 。在 t 0 t_{0} t0 和 t f t_{f} tf 时刻速度均为0。 q ( 0 ) = q 0 , q ( t f ) = q f , q ˙ ( 0 ) = 0 , q ˙ ( t f ) = 0 q(0)=q_{0}, q(t_{f})=q_{f},\dot{q}(0)=0,\dot{q}(t_{f})=0 q(0)=q0,q(tf)=qf,q˙(0)=0,q˙(tf)=0 利用3次多项式来拟合轨迹: q ( t ) = a 0 + a 1 t + a 2 t 2 + a 3 t 3 q ˙ ( t ) = a 1 + 2 a 2 t + 3 a 3 t 2 q ¨ ( t ) = 2 a 2 + 6 a 3 t \begin{aligned} &q(t)=a_{0}+a_{1}t+a_{2}t^{2}+a_{3}t^{3}\\ &\dot{q}(t)=a_{1}+2a_{2}t+3a_{3}t^{2 } \\ &\ddot{q}(t) = 2a_{2}+6a_{3}t \end{aligned} q(t)=a0+a1t+a2t2+a3t3q˙(t)=a1+2a2t+3a3t2q¨(t)=2a2+6a3t 将边界条件代入即可解出参数 a 1 , … , a 3 a_{1},\dots,a_{3} a1,…,a3 。 假设起点与终点的关节速度不为0时,利用3次多项式进行插值。解法同上,不再赘述。 需要注意,选择路径点的关节速度时,要考虑到保证每个路径点的加速度是连续的。 高阶多项式插值当考虑到机器人关节空间起始点和目标点的加速度时,需采用高阶多项式插值。即修改边界条件为: q ( 0 ) = q 0 , q ( t f ) = q f q ˙ ( 0 ) = q ˙ |
【本文地址】
今日新闻 |
推荐新闻 |