格斗机器人入门篇 |
您所在的位置:网站首页 › 机器人打坏人 › 格斗机器人入门篇 |
格斗机器人入门篇
|
行驶系统的重要性 行驶系统在整个格斗机器人的设计当中尤其重要。可能有人会觉得武器是最重要的,但事实并非如此,因为我就犯过这样一个天大的错误。在参加《铁甲雄心》比赛的时候,自己设计的机器人太过于在乎武器的攻击力了,几乎忽略了行驶系统的重要性,导致机器人的设计存在着重大缺陷,十分后悔。
《铁甲雄心》尖刀传奇 为什么说行驶系统是最重要的呢?其实道理很简单,你的武器攻击能力再强,但是你跑的很慢,行驶不灵活或者说控制的不灵活,还有就是机器人行驶很不稳定,很容易拐外过头,冲过头之类的问题,那你就会错过最佳的攻击时间。相反,如果你的机器人行驶系统很稳定,几乎可以做到操控和机器人的行驶保持一致,操控随心所欲,也就是我们常说的老司机级别。老司机绝对不是简简单单的操控厉害,而是将机器人的行驶系统调到相当完美的状态。 当然这里也涉及到轮子的摩擦性、电机转速、机器人的灵活性等问题。机器人的行驶稳定性、灵活性从硬件的角度得到有效的保障之后,才能上升到选手操控的层面,有了充分的经验之后,成为传说中的神操控,才能让你强有力的武器真正发挥它最大攻击力。
墓碑 Tombstone 行驶系统的构成 说完了行驶系统的重要性,再来说明一下行驶系统的构成。行驶系统的动力来源不用说,肯定是电机,常规的比赛电机都是使用直流有刷电机,不过现在国外的很多选手已经放弃有刷电机,使用无刷电机了。 光有电机是不够的,因为如果直接用电机带动轮子,这个轮子会飞起来的!一般的电机转速很高,有每分钟几千转几万转的。所以我们要给电机配一个减速箱,通过这个减速箱,将我们电机的转速降下来,并且还有一个好处,就是输出轴的输出扭矩增大了很多倍。这时候你就可以用它来带动一个轮子。 关于这个轮子,其实也有相当多的说法,其中影响机器人行驶速度的比较重要的参数是轮子的大小,也就是轮胎的外径问题。这个轮子其实也相当于一个减速箱里面的齿轮,如果这个轮子特别大,那这个机器人又可以起飞了!如果这个轮子稍微小一些,机器人的行驶速度就可以慢下来。在不知道该怎么计算或者选择轮子直径的前提下,直接使用低于电机直径的2倍左右的轮子即可,这个方法比较简单,也容易记。
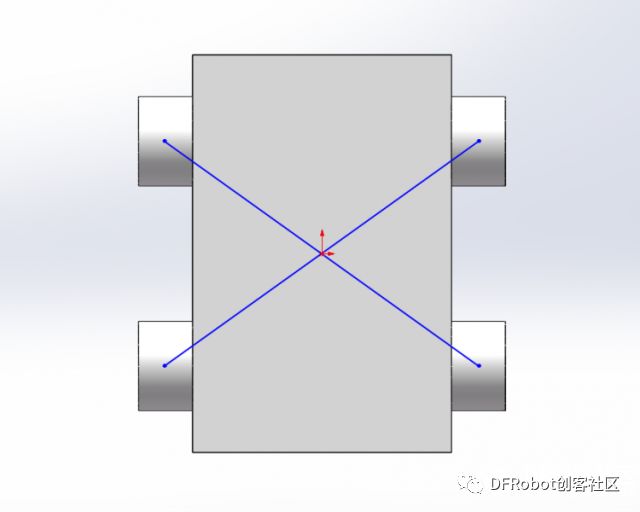
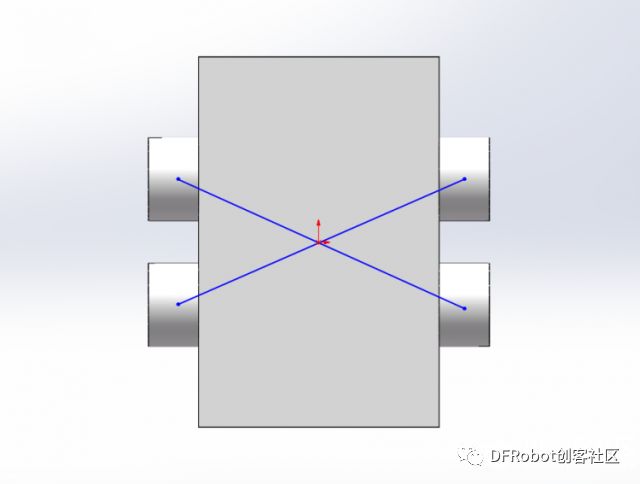
轮子和电机在整个机器人中的布局 前面提到的机器人行驶的稳定性和灵活性,其实是互相矛盾的。先说机器人的稳定性,如果说一个机器人要想稳定行驶,影响最直接的就是轮子的数量,那两个轮子肯定不如四个轮子,四个轮子肯定又不如六个轮子!但是从机器人的灵活性考虑,六个轮子不如四个轮子,四个轮子肯定又不如两个轮子,所以说机器人行驶的稳定性和灵活性是互相矛盾的。因此,如果想操控容易些,机器人行驶更稳定,一般的做法是设计成四轮;如果需要机器人更加灵活,转弯半径更小,一般的做法就是设计成两个轮子。 不过,四个轮子的设计及零件加工有个小要求,就是四个轮子的着地问题。这当中主要影响的是电机的固定高度、结构的对称平整度问题。两轮的格斗机器人比较灵活,因为机器人的转向是来自于两个轮子的差速,就像坦克转向一样。它跟四个轮子的转向虽然是一样的,但是在转向的同时,两个轮子的的机器人以两轮的中点为旋转中心进行转向;四个轮子的机器人以四轮相连的对角线交点为旋转中心进行旋转,四个轮子与地面产生摩擦,这个摩擦力的切向力使得机器人旋转,也就是说电机的输出扭矩没有100%的作用于机器人的旋转。说白一点,就是说机器人旋转还要克服四个轮子与地面的摩擦。这就是为什么两个轮子比四个轮子要灵活的根本原因。
在考虑布局问题之前,我们先要知道机器人的重心在哪里,然后根据机器人的重心才能知道我们的轮子该在什么位置,如果说两个轮子的机器人,这两个轮子的连线肯定要在重心的附近,因为这两个轮子必须起到充分支撑重心的作用,如果说轮子离重心太远,重量偏前或偏后,都会导致影响机器人行驶的灵活性。四个轮子的机器人相对来说容易一点,直接分布于机器人重心的前后两侧并且以重心为对称点尽量对称。但是四个轮子前后轮子的间距问题比较重要,四个轮子的灵活性差,可如果前后轮子的间距减小,也就是前面的轮子比较接近后面的轮子,机器人的灵活性会有很明显的提升。但!前后轮间距太近又有个坏处,就是机器人在行驶的过程当中如果突然急刹车,机器人会有点头效应,机器人会突然前倾,像喝醉了一样。另外就是没有了原来四个轮子的稳定性!所以大家设计四个轮子时,一定要提前考虑好,选择合适的前后轮间距!两轮机器人其实同样有点头效应,但是一般机器人的前面还有个万向轮或者牛眼轮,也有很多人会用耐磨的工程塑料做成的一个球,放在机器人的前面作为机器人前面的支撑,防止点头效应。
牛眼轮 武器系统
格斗机器人根据武器种类的不同,分为很多种类型,有横转的,有竖转的,有弹射的,还有喷火的等等,今天以水平横转类型的墓碑来介绍。因为无论是横转还是竖转,甚至是滚筒,其实原理上是一样的。其它如弹射、凿击等类型的机器人,可以参考DF创客社区里制作相关类型的大牛写的教程。
《铁甲雄心》破风残云 武器系统构成 以横转类型的武器为例,一个格斗机器人的武器系统主要包含:电池、电机、传动、武器。 很多人都知道,为什么四轴飞行器上面会用无刷电机,因为一般有刷电机的工作效率,也就是电能转化成动能的效率比较低,但是无刷电机的效率要高出很多。除此之外,无刷电机换向并不是靠电刷,而是通过电驱动换向,因此其转速会比有刷电机转速快很多,而且无刷电机本身转矩也比有刷电机大。
无刷电机 至于武器动力的传动,无论什么电机,其实最脆弱及最重要的就是它的轴,我们也知道武器是用来跟别人的机器人打仗的,那么打仗就势必会有强烈的撞击,撞击的同时,会给电机尤其是电机轴造成极大的伤害。电机内部结构极为复杂,电机高速旋转,它的轴几乎就是它的命啊!这个轴受到强烈的震动会发生变形,如果轴变形了,电机就极可能再也转不了了,甚至完全修不好。而且即使能转,电机也会因为轴弯而产生强烈的自身震动,造成整个武器系统工作不稳定。所以武器和电机质检一定要有传动!传动存在的目的不仅是将电机的动力输送给武器旋转,还有一个很重要的目的就是保护电机,将武器和电机隔离开,减少武器传给电机的震动。
O型圈传动 对于迷你格斗机器人,同步带传动的齿型有很多种,推荐大家选择齿距为2~5mm左右的同步带,在国内比较容易买到,可以自己进行搜索。也需要购买相应齿数配对的同步轮,一端固定在电机上(同步齿轮内径要与电机轴外径一致),另外一端固定在武器上。还有一种方式就是O型圈(直接搜这个关键词就能买到了),以及V型槽的轮。O型圈相比同步带有优点也有缺点,优点是武器在碰撞的时候,这个O型圈会跟轮打滑,从而保护整个武器系统。相反O型圈的缺点也跟这个有关,由于O型圈会打滑,武器在启动的过程当中,造成启动速度减慢。同步带就不会有打滑的这个问题,因为同步带的传动效率高达98%,只要不脱齿就不会打滑!
同步带传动 武器的攻击力 除了电机和传动,我们还要知道武器的攻击力来自于哪里,主要包括以下几点:速度、重量、材料以及武器轴。 这里所指的速度是武器刀锋旋转的外径所产生的线速度。线速度跟角速度的概念不一样,在电机和传动都确定的情况下,角速度就已经被固定了,但是怎么增加线速度呢?其实很简单,就是把武器变长!但是武器变长不见得是一个好事,因为紧接着第二个就是武器的重量,武器电机所带的负载是有限的,武器重量增加,就相当于电机所带的负载变大,导致武器的启动速度变慢! 另外武器的材料也相当重要。是不是越硬越好,越锋利越好呢?错,这个说法太片面了。硬是好,但是用过菜刀的都应该清楚,硬、锋利就意味着材料脆,那很有可能在遭受一次撞击的时候,刀自己就断裂,而不是变弯!太锋利的话打一两次也就钝了,其实没必要。
最后一个问题是武器轴,这个看似跟武器的攻击力没有什么直接关系,但却间接影响着武器的旋转。在《铁甲雄心》的比赛中,曾经见过横转类型的机器人,在对战当中因为武器轴的材料硬度不够,直径太细,武器轴直接断了!其实每次武器的撞击能够产生相当大的冲击力,武器轴不结实的话是很糟糕的。 总之,想造一台格斗机器人是不难的,感兴趣的朋友大可动手试一试。但如果要造出格斗机器人中的战斗机,那还是需要各位花点时间多钻研多实践。
*更多格斗机器人干货教程,视频分享,请访问DF创客社区官网:www.dfrobot.com.cn
|











 返回搜狐,查看更多
返回搜狐,查看更多【本文地址】
今日新闻 |
推荐新闻 |