广州数控机器人编程讲解视频 |
您所在的位置:网站首页 › 广州数控gsk机器人编程怎么输入坐标 › 广州数控机器人编程讲解视频 |
广州数控机器人编程讲解视频
|
孔口倒圆角 编程思路:以若干不等半径整圆代替环形曲面 例1:平刀倒凸圆角 
已知孔口直径 φ,孔口圆角半径 R,平刀半径 r 建立几何模型 设定变量表达式 #1=θ=0 (θ从0°~90°,设定初始值 #1=0) #2=X=φ/2+R-r-R*SIN [#1] #3=Z=R-R*COS[#1] 程序 O0001; S1000 M03; G90 G54 GOO Z100; G00 X0 Y0; GOO Z3; #1=0 N99#2 =φ/2+R-r-R*SIN [#1] #3 =R-R*COS[#1] G01 X#2 Y0 F300; G01Z-#3 F100; G03 X#2 Y0 I-#2 J0 F300; #1=#1+1; IF[#1LE90]GOTO99; G00 Z100; M30; 例2:平刀加工凹圆角 
已知孔口直径 φ,孔口圆角半径 R,平刀半径 r 建立几何模型 设定变量表达式 #1=θ=0(θ从0°~90° ,设定初始值 #1=0) #2=X=φ/2 +R*SIN [#1]–r #3=Z=R*SIN[#1] 程序 O0001; S1000 M03; G90 G54 GOO Z100; G00 X0 Y0; G00 Z3; #1=0 N99#2 =φ/2+R*SIN[#1]-r #3 = R*SIN [#1] G01 X#2 Y0 F300; G01 Z-#3 F100; G03 X#2 Y0 I-#2 J0 F300; #1=#1+1; IF[#1LE90]GOTO99; G00 Z100; M30; 例3:球刀倒凸圆角 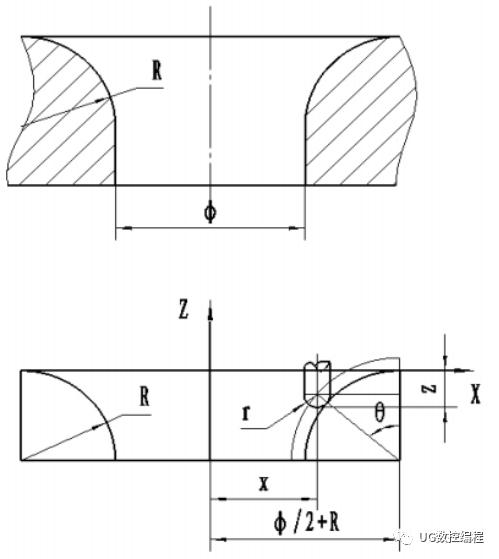
已知孔口直径 φ,孔口圆角半径 R,球刀半径 r 建立几何模型 设定变量表达式 #1=θ=0(θ从0°~90° ,设定初始值 #1=0) #2=X=φ/2 +R- [R+r]*SIN[#1] #3=Z=R-[R+r]*COS[#1]+r =[R+r]*[1-COS[#1]] 程序 O0001; S1000 M03; G90 G54 GOO Z100; G00 X0 Y0; G00 Z3; #1=0 N99#2 =φ/2 +R- [R+r]*SIN[#1]; #3=[R+r]*[1-COS[#1]] G01 X#2 Y0 F300; G01 Z-#3 F100; G03 X#2 Y0 I-#2 J0 F300; #1=#1+1; IF[#1LE90]GOTO99; G00 Z100; M30; 例4:球刀倒凹圆角 已知内口直径 φ,孔口圆角半径 R,球刀半径 r 建立几何模型 设定变量表达式 #1=θ=0(θ从0°~90° ,设定初始值 #1=0) #2=X=φ/2 +R*COS[#1]-r #3=Z=R*SIN[#1] 程序 O0001; S1000 M03; G90 G54 GOO Z100; G00 X0 Y0; G00 Z3; #1=0 N99#2 =φ/2 +R*COS[#1]-r ; #3= R*SIN[#1] G01 X#2 Y0 F300; G01 Z-#3 F100; G03 X#2 Y0 I-#2 J0 F300; #1=#1+1; IF[#1LE90]GOTO99; G00 Z100; M30; |
【本文地址】
今日新闻 |
推荐新闻 |