工业机器人课程:ABB知识点34:功能函数 |
您所在的位置:网站首页 › 工业机器人if指令解释 › 工业机器人课程:ABB知识点34:功能函数 |
工业机器人课程:ABB知识点34:功能函数
|
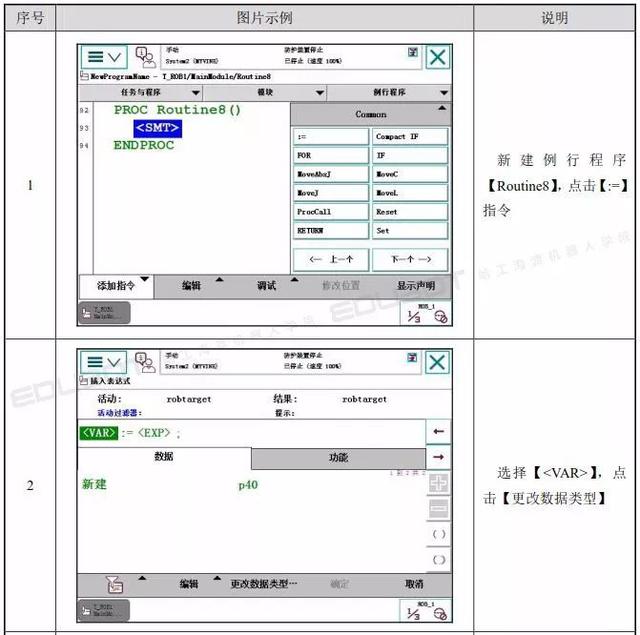
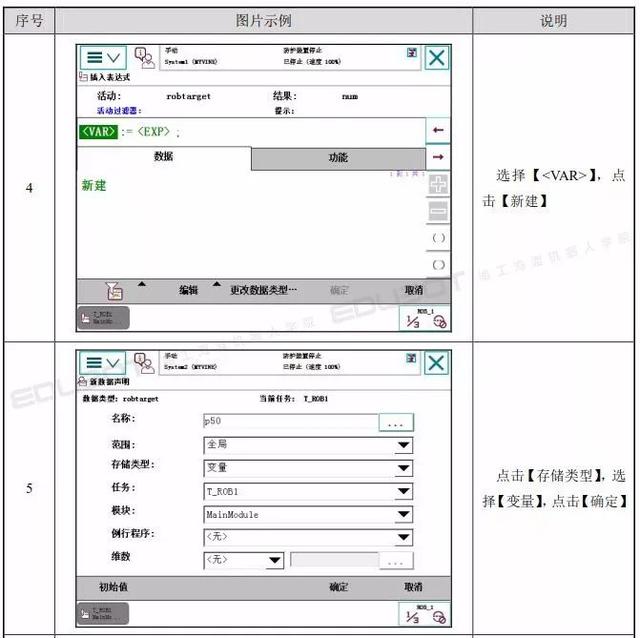
本节要点 掌握CRobT和Offs功能函数的使用 要点解析 NO.1 CRobT指令 CRobT 指令:读取当前机器人位置数据。该函数返回 robtarget 值以及位置(x、y、z)、方位(q1 ... q4)、机械臂轴配置和外轴位置。 NO.2 Offs指令 Offs 指令:目标点位置偏移。为了精确确定目标点,可以采用函数offs。Offs(p,x,y,z)代表离p 点X 轴偏差量为 x,Y 轴偏差量为 y,Z 轴偏差量为z。 操作步骤 NO.1 CRobT指令 CROBT 指令的操作步骤见下表。
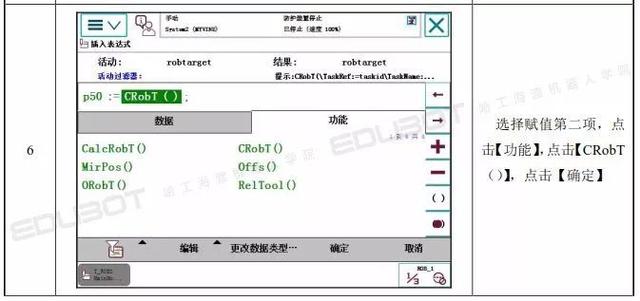
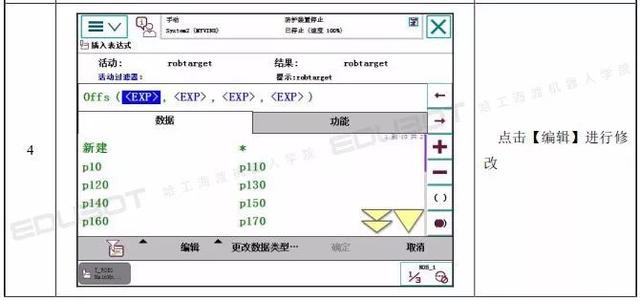
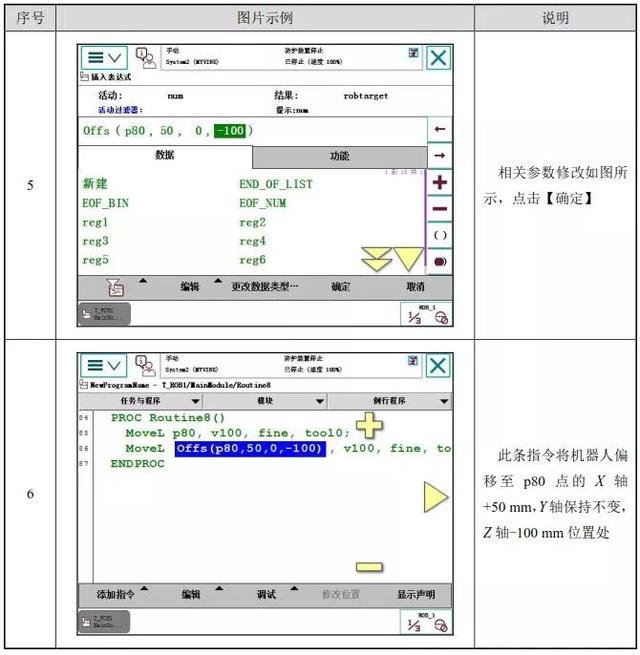
NO.2 Offs指令 Offs 指令的操作步骤见下表。
具体操作视频请进入海渡学院APP免费观看!QQ交流群:563403891返回搜狐,查看更多 责任编辑: |



【本文地址】
今日新闻 |
推荐新闻 |