机械设计基础B【1】自由度 |
您所在的位置:网站首页 › 凸轮连杆组合机构自由度计算例题 › 机械设计基础B【1】自由度 |
机械设计基础B【1】自由度
|
机械设计基础B
平面机构的自由度和速度分析
平面机构的自由度和速度分析
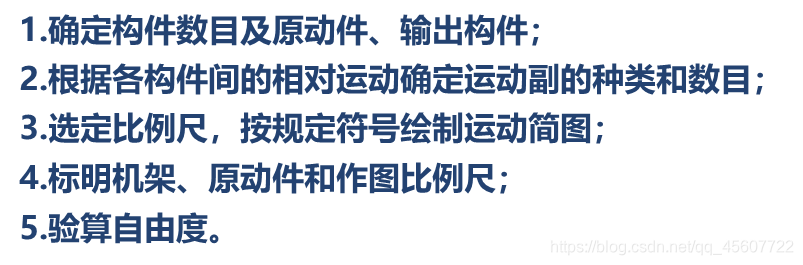
基本概念 构件:机构中运动的单元运动副:两个构建直接接触且具有相对运动的联接。运动副元素:两构件接触处的几何形状(点、线、面)。运动链:若干构件通过运动副联接而成的可动系统。 若将运动链中的一个构件相对固定,运动链则成为机构 机构中的构件的分类 机架 (描述运动的参考系)原动件(运动规律已知的构件)从动件运动副 平面运动副低副:转动副,移动副等,特点:面接触、相对转动或移动 高副:齿轮、凸轮等,特点:点或线接触、沿接触点切线方向相对移动和绕接触点的转动 空间运动副螺旋副、球面副等(这方面不详细学习) 平面运动简图绘制步骤
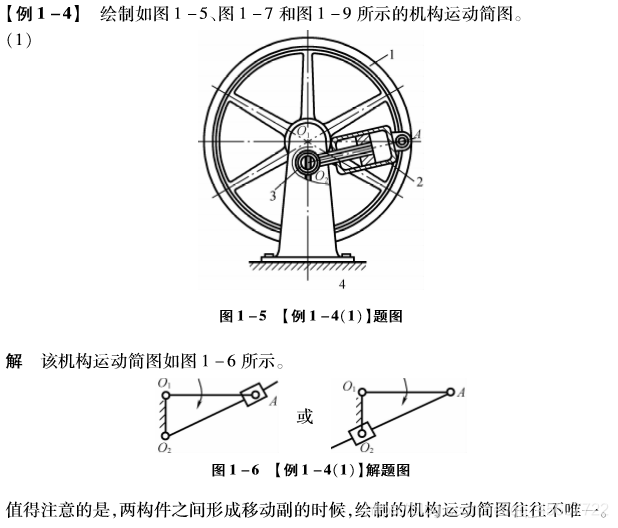
有关平面运动简图的几点 1.机架用带有短剖面线标识 2.在运动简图中,构件的形状与构件的实际形状无关 自由度计算 F = 3 × 活动构件数 - 2 × 低副数 - 高副数 注意的几点: 等宽凸轮按1个高副计算分清:简图中的是齿轮还是减少摩擦用的滚子(后者只是将滑动摩擦变为滚动摩擦,不影响机构的运动,称之为局部自由度)注意局部自由度、虚约束、复合铰链等。经典例题
本文只是个简略的复习笔记,仅供参考 |
【本文地址】
今日新闻 |
推荐新闻 |