|
1、激光雷达介绍 单线的激光雷达Lidar,通过发射和接收激光束来计算与观测物体精确距离。 光速测距:通过飞行时间TOF,首先激光发射器发射激光脉冲,计时器记录发射时间;脉冲经物体反射后由接收器接受,计时器记录接受时间;时间差乘上光速即得到距离的两倍。  2、基本知識 三维扫描点云:通过TOF时间差获得距离,通过水平旋转扫描测角度,并根据这两个参数建立二维的极坐标系,再通过获取不同俯仰角度获得三维的高度信息。 Velodyne公司的64线激光雷达HDL_64E排列着64个激光发射器和接收器,也就是说每次发射、接收会得到一列竖直的64个点,采集过程中这一列发射接收机绕着竖直方向旋转,采集一圈得到4500列激光点。如下图所示,这64个发射器沿着不同的角度发射,最大的水平角为2度,最小水平角为-24.8度,相邻发射器的垂直角分辨率为0.4度,一圈4500个激光点,水平角分辨率为0.08度。 2、基本知識 三维扫描点云:通过TOF时间差获得距离,通过水平旋转扫描测角度,并根据这两个参数建立二维的极坐标系,再通过获取不同俯仰角度获得三维的高度信息。 Velodyne公司的64线激光雷达HDL_64E排列着64个激光发射器和接收器,也就是说每次发射、接收会得到一列竖直的64个点,采集过程中这一列发射接收机绕着竖直方向旋转,采集一圈得到4500列激光点。如下图所示,这64个发射器沿着不同的角度发射,最大的水平角为2度,最小水平角为-24.8度,相邻发射器的垂直角分辨率为0.4度,一圈4500个激光点,水平角分辨率为0.08度。  竖直方向分辨率是0.4°,水平方向上分辨率是0.08°,即竖直方向间隔要比水平方向大很多,所以我们看到的点云都是一圈一圈的。 下图每一个圆圈代表一个激光束产生的数据,激光雷达的线束越多,对物体的检测效果越好。这么多圆圈的高度是不同的,即发射机的发射角度在-24.8~~2度之间。 竖直方向分辨率是0.4°,水平方向上分辨率是0.08°,即竖直方向间隔要比水平方向大很多,所以我们看到的点云都是一圈一圈的。 下图每一个圆圈代表一个激光束产生的数据,激光雷达的线束越多,对物体的检测效果越好。这么多圆圈的高度是不同的,即发射机的发射角度在-24.8~~2度之间。  下图所示为4线激光雷达,4中颜色代表不同的4个激光发射器,四线激光雷达将四个激光发射器进行轮询,一个轮询周期后,得到一帧的激光点云数据。四条点云数据可以组成面状信息,这样就能够获取障碍物的高度信息。 下图所示为4线激光雷达,4中颜色代表不同的4个激光发射器,四线激光雷达将四个激光发射器进行轮询,一个轮询周期后,得到一帧的激光点云数据。四条点云数据可以组成面状信息,这样就能够获取障碍物的高度信息。  3、激光雷达实物 Velodyne公司的64线激光雷达HDL_64E,多线的配置使得激光雷达在每秒内可构建高达百万的数据点。 3、激光雷达实物 Velodyne公司的64线激光雷达HDL_64E,多线的配置使得激光雷达在每秒内可构建高达百万的数据点。  雷达前端上下分布有四组激光发射器(每组16个发射机,共64个)和两组激光接受器(每组32个激光接收机,对应64个)。 一般来说,用以下八个技术指标来评价激光雷达: 雷达前端上下分布有四组激光发射器(每组16个发射机,共64个)和两组激光接受器(每组32个激光接收机,对应64个)。 一般来说,用以下八个技术指标来评价激光雷达:
最大辐射功率:决定是否需要防护
水平视场:是否360度全视角旋转
垂直视场:俯仰角角度(30度/15度)
光源波长:光学参数(纳米级别)
测量距离:是否满足长距离探测(100~200米)
测量时间和帧频率:激光返回一圈的时间
纵向和水平分辨率:对算法影响大,精度越高越贵
测距精度:厘米级
4、雷达坐标系 无论是哪种传感器:相机、激光雷达、毫米波雷达,都有自己的坐标系,也就是所有的传感器产生的数据都是基于传感器自身的坐标系的,然而,一辆自动驾驶汽车,车上会安装许多传感器,为了方便算法研究、测试,都需要将各自传感器获得的数据转换到车体坐标系下,也就是base坐标系,那么这个过程就叫做传感器的外参标定。 激光雷达安装在移动的平台,GNSS 和 IMU 配合使用,可以将激光雷达测量点由相对坐标系转换为绝对坐标系上的位置点,从而应用于不同的系统中。 如下图所示,velodyne lidar被安装为x轴向前,y轴向左,z轴向上的右手坐标系,从雷达坐标系转移到车辆坐标系,车辆坐标系为z轴向前,x轴向左,y轴向上的右手坐标系。  下面的KITTI采集车上,分别呈现了两种坐标系,坐标系转换其实就是传感器的外参标定,传感器坐标系通过一些刚体变换转换到车体坐标系,变换矩阵由旋转矩阵和平移矩阵组成,通过求解6个量(X,Y,Z,Roll, Pitch,Yaw ):前3个值代表分别沿x,y,z方向平移的距离;后3个值代表分别沿x,y,z方向旋转的角度。 下面的KITTI采集车上,分别呈现了两种坐标系,坐标系转换其实就是传感器的外参标定,传感器坐标系通过一些刚体变换转换到车体坐标系,变换矩阵由旋转矩阵和平移矩阵组成,通过求解6个量(X,Y,Z,Roll, Pitch,Yaw ):前3个值代表分别沿x,y,z方向平移的距离;后3个值代表分别沿x,y,z方向旋转的角度。  5、方向角和仰角 仰角和方位角描述了物体在天空相对于观察者的位置。 球面坐标系中,点是由距离和两个角度定义:方向角和仰角。 5、方向角和仰角 仰角和方位角描述了物体在天空相对于观察者的位置。 球面坐标系中,点是由距离和两个角度定义:方向角和仰角。  方位角 φ:φ是X-Y平面上水平罗盘方向 仰角θ:θ 用来描述被观察物体相对于观测点的角度。 方位角 φ:φ是X-Y平面上水平罗盘方向 仰角θ:θ 用来描述被观察物体相对于观测点的角度。 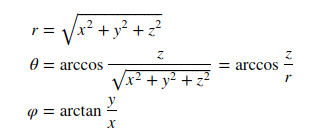  与方位角和仰角息息相关的是角分辨率,分为水平分辨率和垂直分辨率,表明相邻两个点的角度。 水平分辨率指水平方向上扫面线之间的最小间隔度数。由于一秒钟打出激光束的频率固定,所以转速越快,水平方向上扫描线的间隔越大,水平角分辨率越大,两条线的间隔度数越大。 垂直分辨率指的是垂直方向上两条扫描线的间隔度数。 与方位角和仰角息息相关的是角分辨率,分为水平分辨率和垂直分辨率,表明相邻两个点的角度。 水平分辨率指水平方向上扫面线之间的最小间隔度数。由于一秒钟打出激光束的频率固定,所以转速越快,水平方向上扫描线的间隔越大,水平角分辨率越大,两条线的间隔度数越大。 垂直分辨率指的是垂直方向上两条扫描线的间隔度数。
6、激光雷达的数据  激光雷达数据的处理顺序一般为: 激光雷达数据的处理顺序一般为:
1、数据预处理(坐标转换,去噪声) 2、聚类(根据点云距离或反射强度) 3、提取聚类后的特征,根据特征进行分类等后处理工作。
|