ROS1+mediapipe+使用摄像头进行人体识别 |
您所在的位置:网站首页 › ros机器人开发实践百度网盘 › ROS1+mediapipe+使用摄像头进行人体识别 |
ROS1+mediapipe+使用摄像头进行人体识别
|
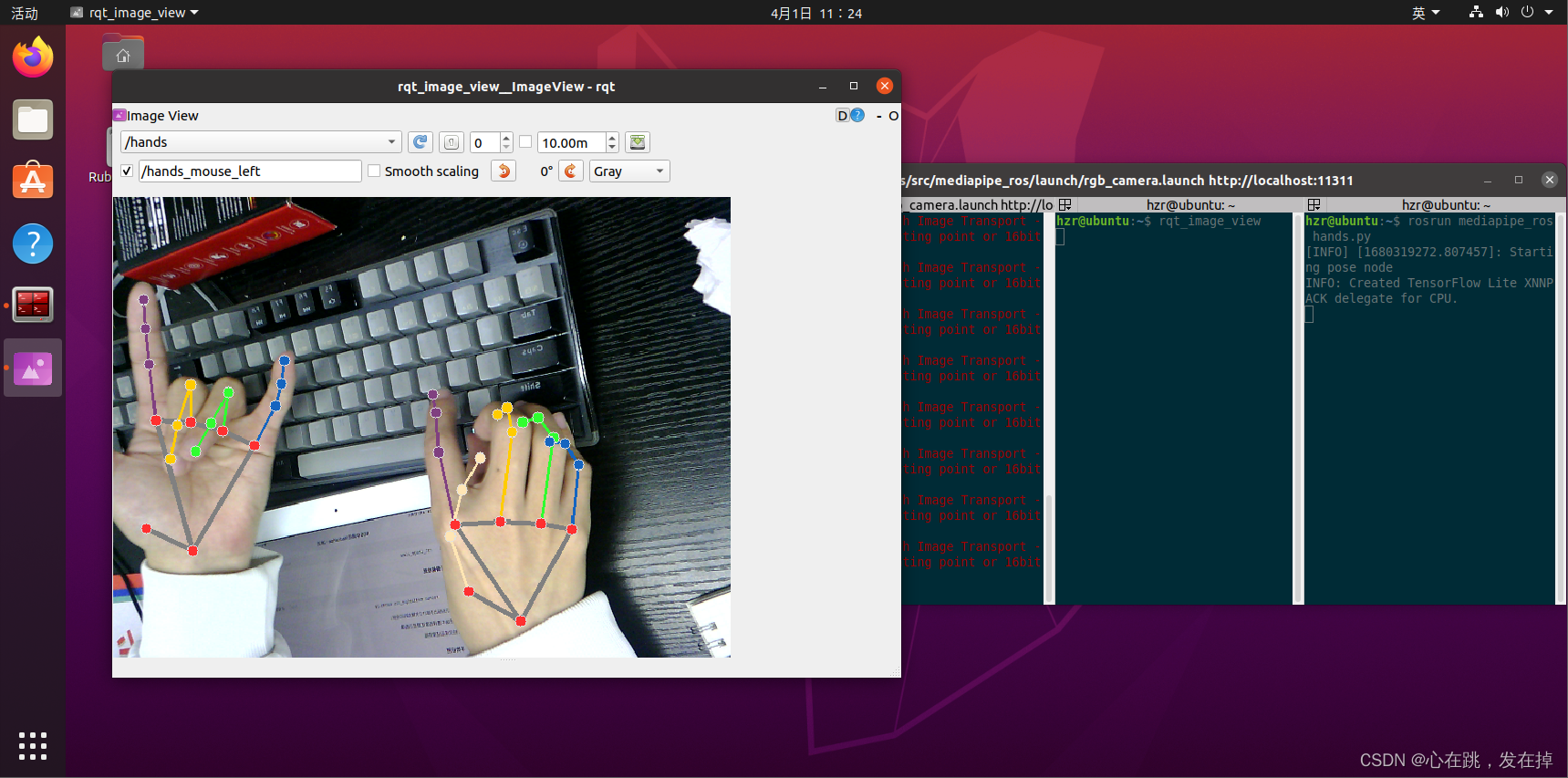
提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档 目录 前言 一、虚拟机安装和Ubuntu20.04安装与配置 二、安装mediapipe和ROS 1.mediapipe 2.安装ROS 三、调用mediapipe_ros功能包 1.建立ros工作空间 2.克隆mediapipe_ros源码到工作空间 总结 前言ROS是什么,值不值得学习,学了以后有什么用。这些我现在是没有什么深刻的理解的,希望在后面学习过程中得到理解。 话不多说,这是一个对ROS入门实践的一个不错的项目。不得不说ROS学习曲线是真滴曲折,下面我将整个过程记录一下。 一、虚拟机安装和Ubuntu20.04安装与配置首先在电脑上安装好虚拟机VMware,我装的是16PRO版本,详情可以参考 VMware16的安装及VMware配置Linux虚拟机(详解版)_vmware虚拟机16_叁Mar.的博客-CSDN博客 Ubuntu版本选择的话我尝试过18.04的,但18.04的安装ros版本为Melodic Morenia ,这个安装的话它的python版本是2.7的。貌似不能与meidapipe兼容,因为下载mediapipe的时候会提示找不到所匹配的版本。 因此,我换了20.04的版本,为方便下载,提供网盘直接下载 链接:https://pan.baidu.com/s/1JergRa3-9A4S-JsutRiP2Q?pwd=ku3n 提取码:ku3n 然后按照一般步骤即可安装好Ubuntu20.04 安装好后还需要进一步配置 这篇文章写得挺详细的 Ubuntu20.04虚拟机安装与配置教程总结_ubuntu安装虚拟机_HGGshiwo的博客-CSDN博客 还有推荐一个挺好用的终端ubuntu下Terminator终端的使用及配置_terminator怎么保存界面设置_Tansir94的博客-CSDN博客 二、安装mediapipe和ROS 1.mediapipe我是先安装mediapipe的后安装ros,不知道顺序上有没有影响。 安装pip3 sudo apt install python3-pip安装mediapipe pip3 install mediapipe -i https://mirrors.cloud.tencent.com/pypi/simple 2.安装ROS安装对应版本Noetic Ninjemys 可以参考一下详细介绍如何在ubuntu20.04中安装ROS系统,以及安装过程中出现的常见错误的解决方法,填坑!!!_在ubuntu上安装ros_慕羽★的博客-CSDN博客 期间也出现了一些问题,比如密钥导不进去,关于ros安装过程设置密钥不成功解决方案_安装ros过程中密匙_longbatianxia1的博客-CSDN博客 三、调用mediapipe_ros功能包 1.建立ros工作空间ROS基础---创建ros工作空间、设置ros环境变量(四个方法)、创建ros功能包_ros创建工作空间_李德龙杰的博客-CSDN博客 2.克隆mediapipe_ros源码到工作空间 cd catkin_ws/src/ git clone https://gitee.com/bingda-robot/mediapipe_ros.git3.测试运行 启动摄像头,根据实际使用的摄像头设备号填写device值,一般为0 roslaunch mediapipe_ros rgb_camera.launch device:=video0再起一个终端,打开一个rqt窗口 rqt_image_view再起一个终端进行话题调用,手部骨骼检测 rosrun mediapipe_ros hands.py完整的功能包使用可以看ROS中调用MediaPipe · 冰达 在这个过程中出现一些问题,比如摄像头无法开启 虚拟机中可移动设备灰色 usb无法连接到客户机_虚拟机可移动设备连接不上_๑自强不息@的博客-CSDN博客 /usr/bin/env: “python”: 没有那个文件或目录/usr/bin/env: “python”: 没有那个文件或目录——解决办法_python 不在userbinenv_Ramsay Amphertham的博客-CSDN博客 缺少安装包啥的,可以重新安装一下mediapipe 总结到最好,终于可以看到摄像头识别成功。这让我对ros的运行机制有了一些了解。接下来会继续研究如何在ros小车上进行人体姿态的识别。也会不定期更新学习情况。
|
【本文地址】
今日新闻 |
推荐新闻 |