PID理论详解 |
您所在的位置:网站首页 › pid参数公式 › PID理论详解 |
PID理论详解
|
PID控制器的基本理念是读取传感器,根据计算比例、积分、微分响应得出期望的激励器输出,将三个值相加计算输出。开始定义PID控制器的参数之前,要先了解闭环系统及其相关术语。 闭环系统在一个典型的控制系统里,过程变量是需要被控制的系统变量。 例如,温度(ºC)、压强(psi)、流速(升/分钟)。传感器用来测量过程变量,并对控制系统做出反馈。设定值是过程变量的期望值或必须达到的值。例如,在一个温控系统中,设定温度值为100摄氏度。在任意时间点上,控制系统算法(补偿器)使用过程变量和设定值之间的差值,得到期望的激励器输出,驱动系统(设备)。例如,如测量得到的温度过程变量为100 ºC,期望的温度设定值为120 ºC,控制器算法的激励器输出将指示打开加热器。驱动激励器打开加热器,整个系统就逐渐变热,温度过程变量测得的结果也会增加。这就是一个闭环控制系统,读取传感器提供即时反馈,并计算期望的激励器输出,这三项操作以固定速率循环往复,如图1所示。 在很多情况下,激励器输出的并不是对系统有影响的唯一信号。例如,在温度舱内,可能会有冷空气源。 冷空气吹入舱内时,会扰动环境温度。 这类扰动因素叫做干扰。我们在设计控制系统时,通常会尽可能减少对过程变量的干扰因素。 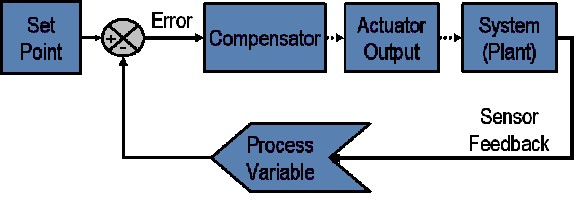 图1:典型闭环系统的示意图。
术语定义
图1:典型闭环系统的示意图。
术语定义
控制设计过程从定义性能需求开始。控制系统的性能一般通过应用一个阶跃函数作为设定值命令变量,然后测量过程变量的响应。一般来说,我们通过测量定义的波形特征来量化响应。上升时间是系统从稳定状态(或最终值)的10%上升到90%所需的时间。过冲百分比是过程变量超过最终值的百分比数,并以最终值的百分比表示。稳定时间是过程变量值稳定在最终值(通常是5%)范围内所需的时间。稳定状态误差是过程变量和设定值之间的最终差值。请注意,这些值的确切定义在学术和工业上的定义不尽相同。 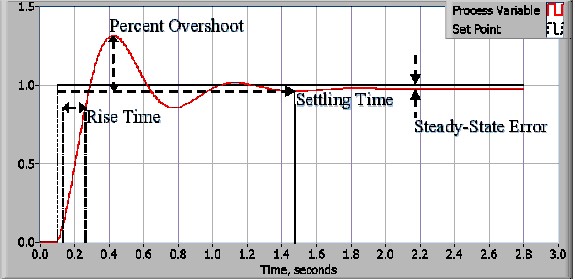 图2:典型PID闭环系统的响应。
使用这些量来定义控制系统的性能要求时,需定义控制系统满足这些设计需求时可能遇到的“最坏情况”,这样做是很有用的。一般而言,系统中都有一个影响过程变量或过程变量测量值的干扰。所以,要设计一个在最坏情况下都能圆满工作的控制系统。控制系统克服干扰的能力,被称为控制系统的干扰抑制。
在某些情况下,对于一个给定控制输出的系统反馈可能会因时间或某个相关变量而变化。在非线性系统中,控制参数在某个时刻给出的期望响应,但是在另一个时刻可能无法给出满意的响应。例如,舱室中几乎为空时,其对加热器输出的响应比舱室填满或几乎填满液体时更快。控制系统对干扰和非线性的耐受度,被称为控制系统的稳定性。
有些系统会出现非预期的不响应期。不响应期是过程变量改变和观测到该改变之间的时间延迟。例如,如温度传感器离冷水阀较远,无论冷水阀打开或关闭,传感器都无法立即监测到温度变化。不响应期也可能是因为系统或输出激励器响应控制命令比较缓慢。例如,阀门打开和关闭的速度很缓慢。在化工厂,造成不响应期的常见原因是化学试剂在管道中流通需要时间。
循环周期也是闭环系统的重要参数。调用控制算法之间的时间间隔是循环周期时间。变化迅速或操作复杂的系统,需要更快的循环速率。
图2:典型PID闭环系统的响应。
使用这些量来定义控制系统的性能要求时,需定义控制系统满足这些设计需求时可能遇到的“最坏情况”,这样做是很有用的。一般而言,系统中都有一个影响过程变量或过程变量测量值的干扰。所以,要设计一个在最坏情况下都能圆满工作的控制系统。控制系统克服干扰的能力,被称为控制系统的干扰抑制。
在某些情况下,对于一个给定控制输出的系统反馈可能会因时间或某个相关变量而变化。在非线性系统中,控制参数在某个时刻给出的期望响应,但是在另一个时刻可能无法给出满意的响应。例如,舱室中几乎为空时,其对加热器输出的响应比舱室填满或几乎填满液体时更快。控制系统对干扰和非线性的耐受度,被称为控制系统的稳定性。
有些系统会出现非预期的不响应期。不响应期是过程变量改变和观测到该改变之间的时间延迟。例如,如温度传感器离冷水阀较远,无论冷水阀打开或关闭,传感器都无法立即监测到温度变化。不响应期也可能是因为系统或输出激励器响应控制命令比较缓慢。例如,阀门打开和关闭的速度很缓慢。在化工厂,造成不响应期的常见原因是化学试剂在管道中流通需要时间。
循环周期也是闭环系统的重要参数。调用控制算法之间的时间间隔是循环周期时间。变化迅速或操作复杂的系统,需要更快的循环速率。
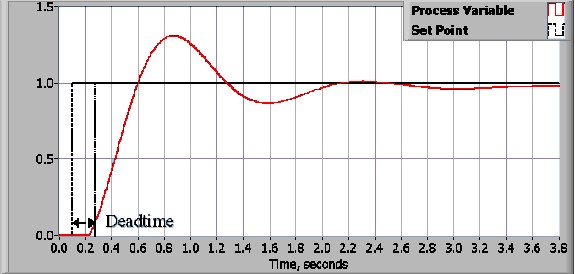 图3:闭环系统的响应及其不响应期。
图3:闭环系统的响应及其不响应期。
一旦指定了性能需求,即可开始检查系统并选择合适的控制方案。在大多数应用程序中,PID控制程序必须提供结果 |
【本文地址】
今日新闻 |
推荐新闻 |