永磁直流电动机的速度控制(二)PID参数整定的衰减曲线法 |
您所在的位置:网站首页 › pid调节参数整定方法及设置技巧图片 › 永磁直流电动机的速度控制(二)PID参数整定的衰减曲线法 |
永磁直流电动机的速度控制(二)PID参数整定的衰减曲线法
|
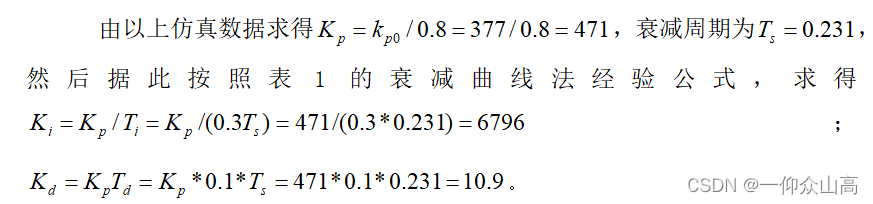
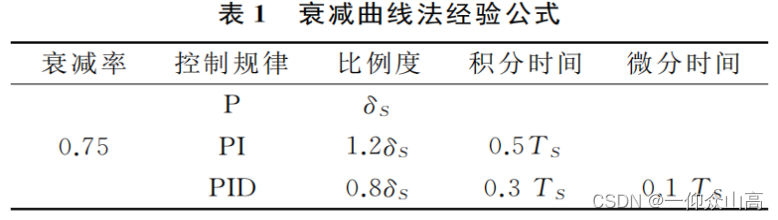
目录 1. 衰减曲线法简介 2.衰减曲线法实现PID参数整定的步骤 3.Matlab程序实现衰减曲线法的PID参数整定 1.衰减曲线法 衰减曲线法也是工程实际中一种比较常用的PID参数整定方法,它基于闭环系统,通过观察系统过度过程响应曲线的衰减特性来确定PID控制器的参数。这种方法的基本原理是,当系统在单位阶跃输入下达到一定的衰减比时,系统的动态性能和稳态性能达到一个较好的平衡状态。 应用衰减曲线法求取PID参数的步骤:(1)确定衰减比 衰减比是指系统响应曲线达到第一个峰值后,下降到该峰值的某个百分比。根据系统的不同工况,选择一个合适的衰减率,对于一个定值控制系统通常选取衰减率为0.75或衰减比例度为4:1;对于随动系统通常选取衰减率为0.9或衰减比例度为10:1。这里是对永磁直流电动机的转速(给定的特定值)进行控制,所以选取衰减比为0.75果衰减比例度为4:1。 (2)衰减特性指标 确定衰减率后,可以通过单位阶跃响应曲线求取衰减特性指标,即衰减率和衰减周期。在这里,衰减率(R)是指系统开始震荡时最先前的相邻两个波峰,第二个波的波峰值(P2)与第一个波的波峰值(P1)之比,衰减周期(Ts)是指以上述两个波峰之间的距离(Ts=t2-t1)。注意:P1和P2指的是系统响应曲线上相邻两个同向波峰的垂直高度,这两个高度是从系统的设定点或者期望输出值开始测量的。 (3)计算PID参数 连续系统的PID控制器的传递函数可以表示为:
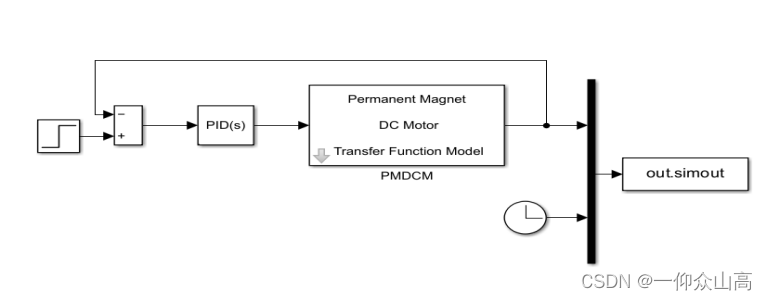
根据上述方程和永磁直流电动机传递函数数学模型,建立起系统的simulink仿真模型(命名为pmdcm_PID)如图1所示。
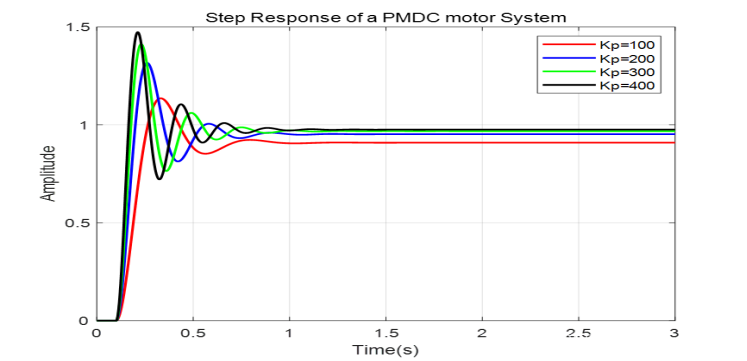
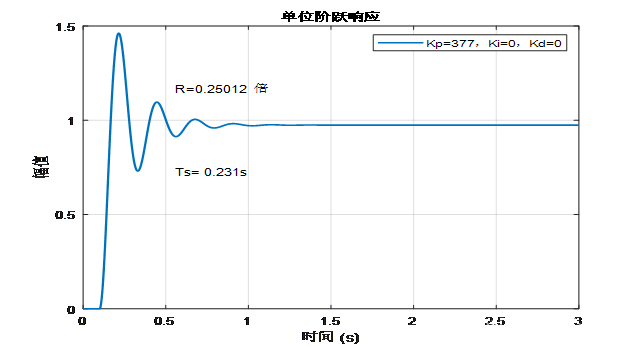
图1 用以实现衰减曲线法的仿真模型 首先对闭环反馈系统中PID控制器的参数进行设置(Ki=0,Kd=0),然后将比例增益Kp由小到大增加,每改变一次值,系统仿真运行一次,并通过示波器(Scope)观察响应曲线,直到衰减比例度4:1的曲线出现为止,记录此时波形曲线的衰减率和震荡周期。初始比例增益Kp0的设置,可以先考虑一下开环的单位阶跃响应曲线,其稳态值离设定值1相差甚远,因此要设置得比较大,设置的初值要引起较大的超调,进而引起衰减震荡。这里,设置Kp0=[100 200 300 400],用Matlab程序对Simulink模型进行仿真,得仿真结果如图2所示。观测仿真曲线,发现Kp0=400时的特性曲线最接近既定目标(衰减比例度4:1),只是略为大了一点点,当调整Kp0=377时,达到了目标,仿真结果如图3所示。
图2.
图3.
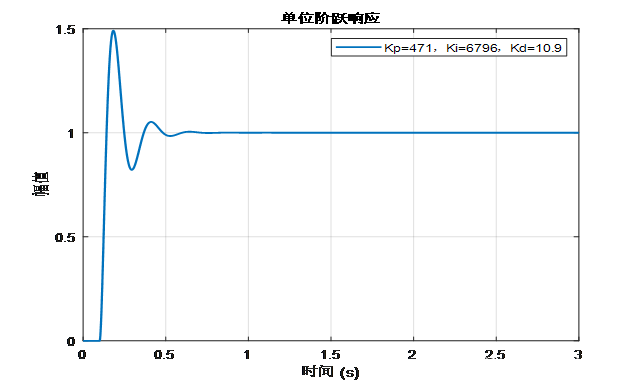
比较图4和图3可知,图4的超调略有上升,震荡减轻,稳态误差大为减少,但超调量还是过高(为49%),与小于5%的设计要求相差很远,若要满足这一要求,PID的各个参数还要进一步调整。 上述衰减曲线法整定PID参数,主要是在既定目标下(使闭环阶跃响应的震荡衰减比例度为某一特定值,例如4:1)应用经验公式达到整定PID参数的目的,比前面的“试凑法”要先进一些,但过程还是比较繁琐,同时,花费的时间也比较多。为解决这一问题,可以用Matlab代码和Simulink模型仿真“一站到位式”的实现衰减曲线法整定PID参数。运行以下Matlab代码,可以“一站到位”求得图4所示的仿真曲线。 clc clear all close all load_system('pmdcm_PID'); Ra = 1; La = 0.5; J = 0.01; Bm = 0.1; Kt = 0.01; Ke = 0.01; %PID 参数初值设置 Kp =300; Ki = 0; Kd = 0; R=0; %衰减曲线比率限定值 %判断最初相邻两峰值之比率是否满足1:4 while(R |



【本文地址】
今日新闻 |
推荐新闻 |