【PID】PID的调整方法 |
您所在的位置:网站首页 › pid调节参数口诀 › 【PID】PID的调整方法 |
【PID】PID的调整方法
|
一.PID介绍
PID控制器是通过对误差信号e(t)进行比例,积分和微分运算,其结果的加权,得到控制器的输出U(t),该值就是控制对象的控制值。 PID控制器的数学描述为: 比例系数增加时,系统的响应速度会加快,系统的稳态误差则会降低。从而能够提高控制精度。 当比例系数Kp过大,会使系统出现超调量,导致系统发生振荡或使振荡次数增加,以至于系统的稳定性变低,反而延长了调节时间。 当比例系数Kp过小,系统调节将会变得缓慢。 2. 积分时间常数Ki积分时间常数Ki主要对积分作用的强弱产生影响,其值越小作用越强。 当积分时间常数Ki过大,系统虽然在一定程度上减小了超调量和振荡,但是也会增加系统为了消除静差所消耗的时间。 当积分时间常数Ki过小,便会引起振荡次数增加,导致系统稳定性变差。 3. 微分时间常数Kd微分时间常数Kd对系统的稳态过程不存在影响,仅在其动态过程中起作用。其值偏大或偏小都会引起系统的超调量的增大,延长调节时间,因此合理的Kd值才能获得比较满意的过渡过程。 三.PID的调整方法 1.响应缓慢,可增大Kp
|
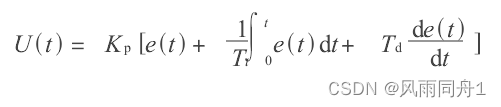 其中的:e(t)=r(t)-c(t)为误差信号。r(t)为输入量;c(t)为输出量;U(t)为控制器的输出;Kp为控制器的比例放大系数;TI为控制器的积分时间常数;Td为控制器的微分时间常数。
其中的:e(t)=r(t)-c(t)为误差信号。r(t)为输入量;c(t)为输出量;U(t)为控制器的输出;Kp为控制器的比例放大系数;TI为控制器的积分时间常数;Td为控制器的微分时间常数。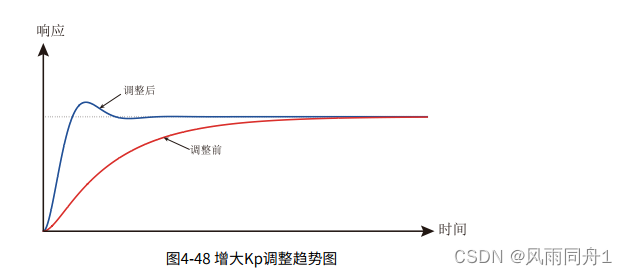 增大Kp调整趋势图
增大Kp调整趋势图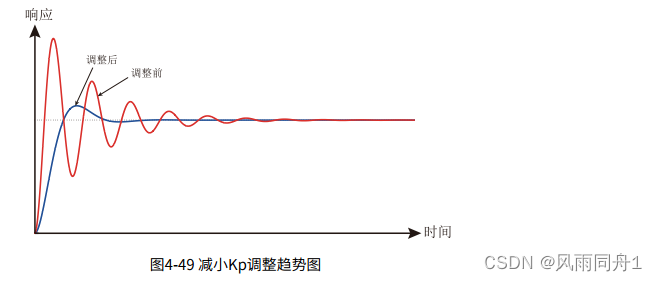 减小Kp调整趋势图
减小Kp调整趋势图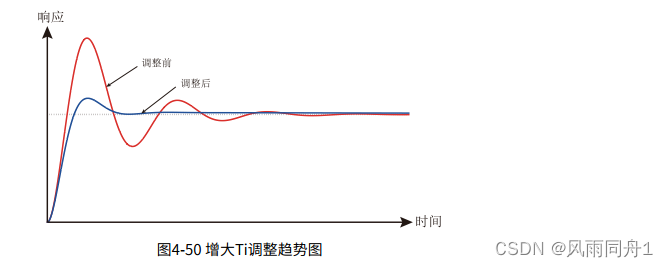 增大Ti调整趋势图
增大Ti调整趋势图 负载波动时,增大Kp调整趋势图
负载波动时,增大Kp调整趋势图  负载波动时,减小Ti调整趋势图
负载波动时,减小Ti调整趋势图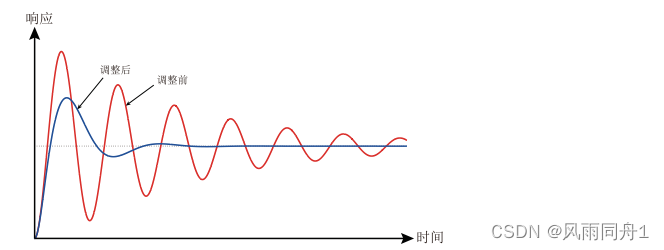
【本文地址】
今日新闻 |
推荐新闻 |