MPC模型预测控制:原理详解、Matlab和C++编程实现,以四个实际案例为例分析 |
您所在的位置:网站首页 › mpc控制器工具箱 › MPC模型预测控制:原理详解、Matlab和C++编程实现,以四个实际案例为例分析 |
MPC模型预测控制:原理详解、Matlab和C++编程实现,以四个实际案例为例分析
|
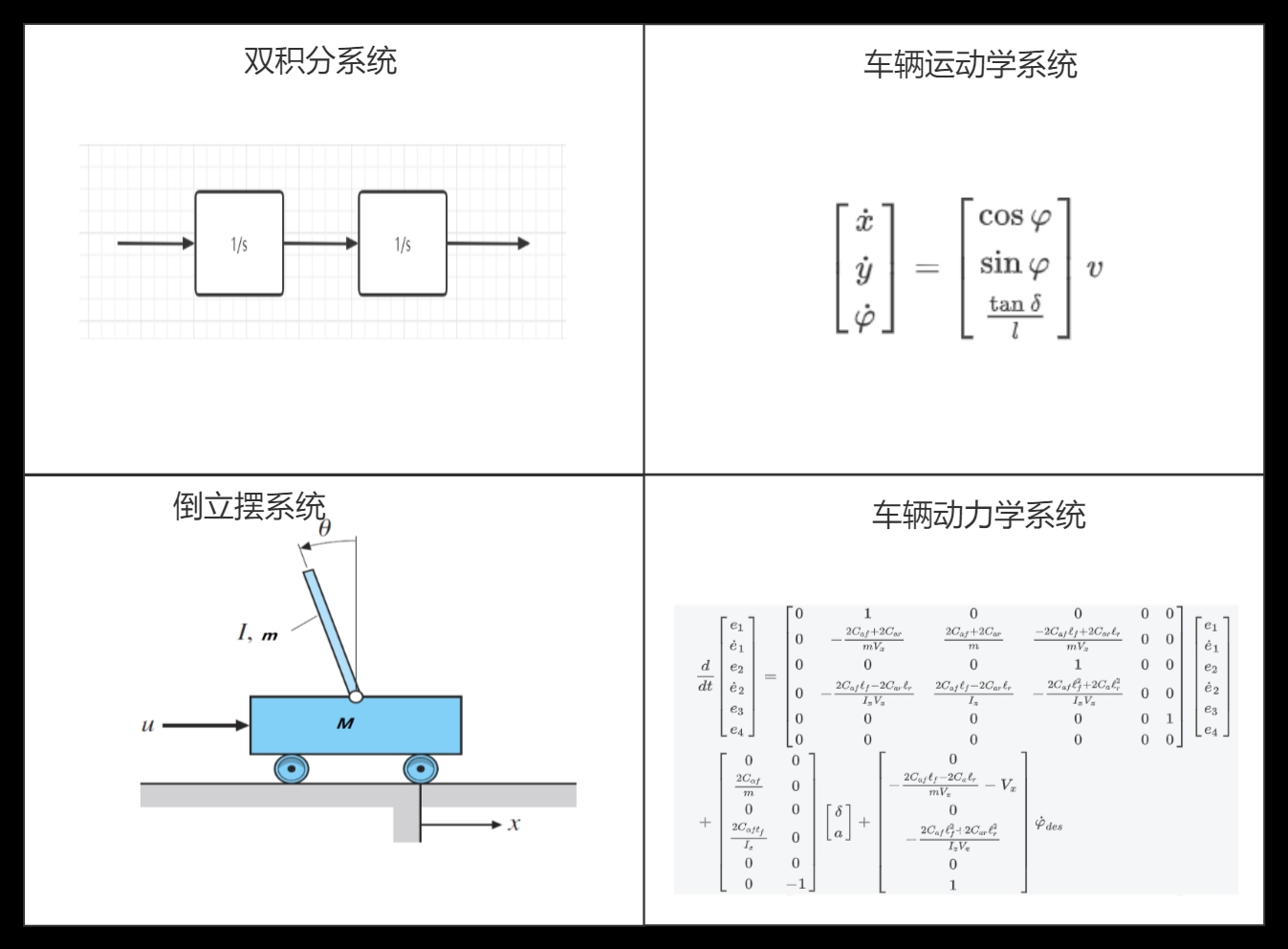
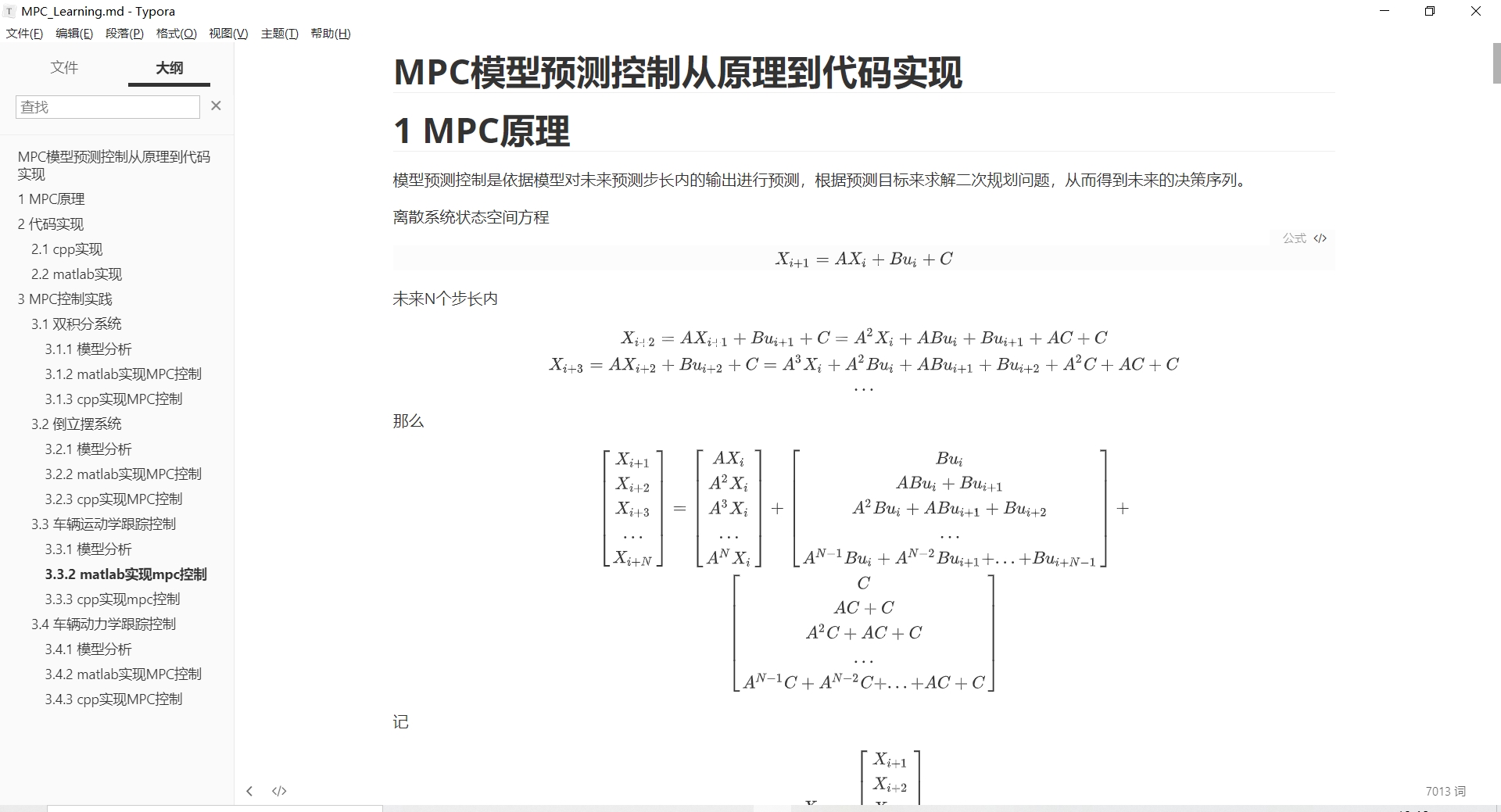
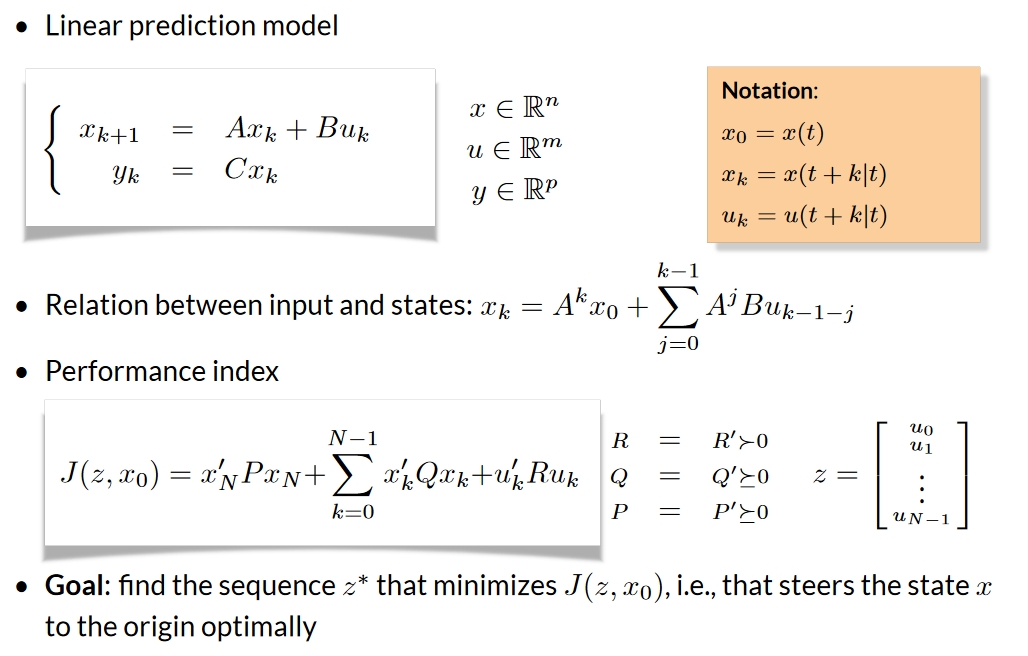
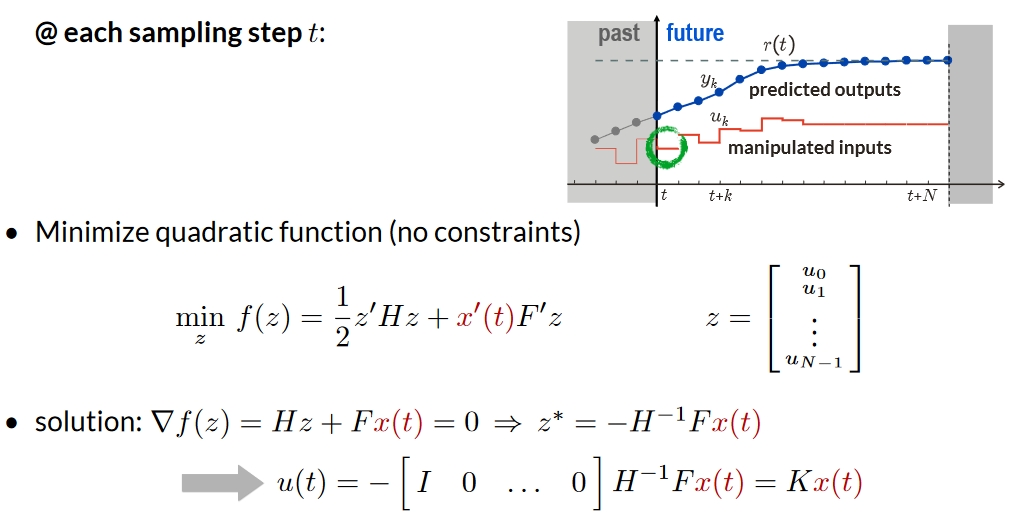
mpc模型预测控制从原理到代码实现 mpc模型预测控制详细原理推导 matlab和c++两种编程实现 四个实际控制工程案例: 双积分控制系统 倒立摆控制系统 车辆运动学跟踪控制系统 车辆动力学跟踪控制系统 包含上述所有的文档和代码。 ID:5645655344134433 autorobot MPC模型预测控制:原理、实现及应用 摘要:本文主要介绍MPC(模型预测控制)的原理、代码实现以及四个实际控制工程案例,包括双积分控制系统、倒立摆控制系统、车辆运动学跟踪控制系统和车辆动力学跟踪控制系统。通过对MPC的详细分析和应用案例的讲解,展示MPC在实际工程中的应用价值。 第一节:引言 MPC作为一种先进的控制算法,在多个领域得到了广泛应用。它基于模型预测的思想,通过优化控制算法对未来一段时间内的系统行为进行预测,从而有效地解决了传统控制方法中存在的一些问题。本节将对MPC的基本原理进行介绍。 第二节:MPC基本原理 2.1 MPC的控制目标 2.2 MPC的优化问题 2.3 MPC的预测模型 2.4 MPC的迭代计算过程 本节将对MPC的基本原理进行详细的推导和解释,包括控制目标、优化问题、预测模型和迭代计算过程等方面。 第三节:MPC的代码实现 3.1 MATLAB编程实现 3.1.1 程序结构 3.1.2 输入输出处理 3.1.3 算法实现 3.2 C++编程实现 3.2.1 程序结构 3.2.2 输入输出处理 3.2.3 算法实现 本节将详细介绍MPC在MATLAB和C++两种编程语言中的实现方法,包括程序结构、输入输出处理和算法实现等方面。 第四节:实际控制工程案例 4.1 双积分控制系统 4.1.1 系统建模 4.1.2 MPC控制器设计 4.1.3 实验结果分析 4.2 倒立摆控制系统 4.2.1 系统建模 4.2.2 MPC控制器设计 4.2.3 实验结果分析 4.3 车辆运动学跟踪控制系统 4.3.1 系统建模 4.3.2 MPC控制器设计 4.3.3 实验结果分析 4.4 车辆动力学跟踪控制系统 4.4.1 系统建模 4.4.2 MPC控制器设计 4.4.3 实验结果分析 本节将介绍四个实际控制工程案例,包括双积分控制系统、倒立摆控制系统、车辆运动学跟踪控制系统和车辆动力学跟踪控制系统。对每个案例,我们将介绍系统的建模方法、MPC控制器的设计以及实验结果的分析。 第五节:总结与展望 综合总结本文的主要内容,并对MPC在控制领域的进一步应用进行展望。 本文对MPC模型预测控制进行了全面的介绍,从原理到代码实现,再到实际工程案例的应用,旨在帮助读者全面了解MPC的概念、基本原理和工程应用。通过本文的阐述,读者可以更深入地理解MPC的优势和局限性,并在实际工程中灵活运用。希望这篇文章能够成为程序员社区中一篇具有实质性内容的技术分析文章,为读者提供有价值的学习资料和实践指导。 关键词:MPC模型预测控制、控制目标、优化问题、预测模型、迭代计算、MATLAB、C++、实际控制工程案例、双积分控制系统、倒立摆控制系统、车辆运动学跟踪控制系统、车辆动力学跟踪控制系统、程序实现、实验结果分析。 相关代码,程序地址:http://lanzoup.cn/655344134433.html |
【本文地址】
今日新闻 |
推荐新闻 |