数学建模:非线性规划的 Python 求解 |
您所在的位置:网站首页 › 01规划数学建模 › 数学建模:非线性规划的 Python 求解 |
数学建模:非线性规划的 Python 求解
|
目录
一般形式Python 求解1. scipy.optimize.minimize 函数调用方式:参数:返回:例 1例 2
2. cvxopt.solvers 模块求解二次规划标准型:调用方式:例 3
3. cvxpy 库例 4
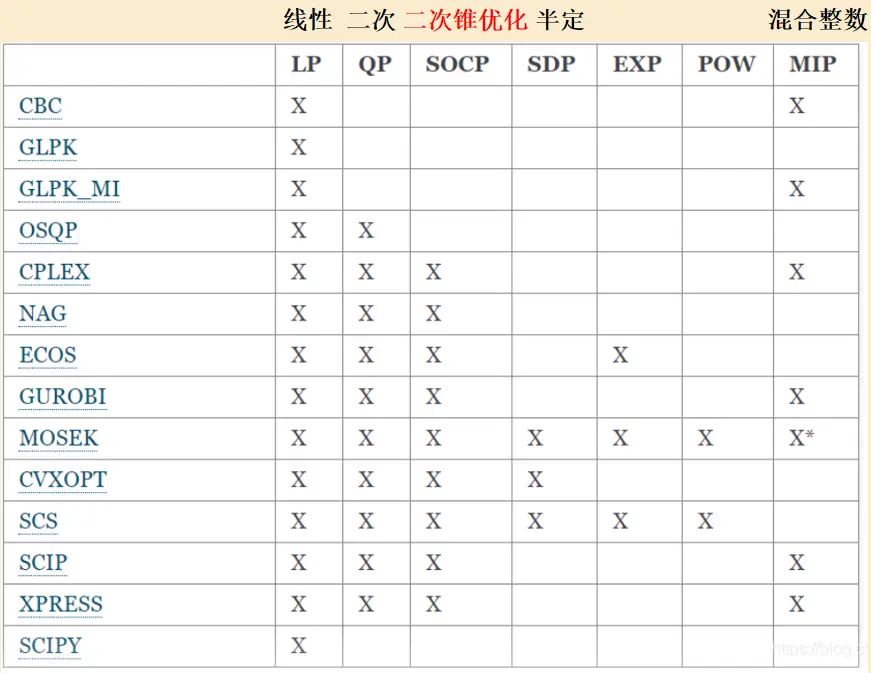
如果目标函数或约束条件中包含非线性函数,就称这种规划问题为非线性规划问题。一般来说,求解非线性规划要比线性规划困难得多,而且,不像线性规划有通用的方法。非线性规划目前还没有适用于各种问题的一般算法,各个方法都有自己特定的适用范围。 一般形式非线性规划的一般形式为 min f ( x ) , s.t. { G ( x ) ≤ 0 , H ( x ) = 0 , \begin{gathered} \min \quad f(x), \\ \text { s.t. }\left\{\begin{array}{l} G(x) \leq 0, \\ H(x)=0, \end{array}\right. \\ \end{gathered} minf(x), s.t. {G(x)≤0,H(x)=0, 其中 G ( x ) = [ g 1 ( x ) , g 2 ( x ) , ⋯ , g m ( x ) ] T G(x)=\left[g_{1}(x), g_{2}(x), \cdots, g_{m}(x)\right]^{T} G(x)=[g1(x),g2(x),⋯,gm(x)]T, H ( x ) = [ h 1 ( x ) , h 2 ( x ) , ⋯ , h l ( x ) ] T H(x)=\left[h_{1}(x), h_{2}(x), \cdots, h_{l}(x)\right]^{T} H(x)=[h1(x),h2(x),⋯,hl(x)]T, f , g i , h j f, g_{i}, h_{j} f,gi,hj 都是定义在 R n \mathbb{R}^{n} Rn 上的实值函数 Python 求解在使用 Python 求解非线性规划时要注意求解器的适用范围,各求解器的适用范围如下 fun: 目标函数: fun(x, *args) x 是形状为 (n,) 的一维数组 (n 是自变量的数量) x0: 初值, 形状 (n,) 的 ndarray method: 求解器的类型,如果未给出,有约束时则选择 'SLSQP'。 constraints: 求解器 SLSQP 的约束被定义为字典的列表,字典用到的字段主要有: 'type': str: 约束类型:“eq” 表示等式,“ineq” 表示不等式 (SLSQP 的不等式约束是 f ( x ) ≥ 0 f(x)\geq 0 f(x)≥0 的形式)'fun': 可调用的函数或匿名函数:定义约束的函数bounds: 变量界限 返回: print(res.fun) #最优值 print(res.success) #求解状态 print(res.x) #最优解e.g. from scipy.optimize import minimize import numpy as np def obj(x): # 定义目标函数 return f(x) LB=[LB]; UB=[UB] # n 个元素的列表 cons=[{'type':'ineq','fun':lambda x: G(x)},{'type':'eq','fun':lambda x: H(x)}] bd=tuple(zip(LB, UB)) # 生成决策向量界限的元组 res=minimize(obj,np.ones(n),constraints=cons,bounds=bd) #第2个参数为初值 print(res.fun) #最优值 print(res.success) #求解状态 print(res.x) #最优解 例 1min 2 + x 1 1 + x 2 − 3 x 1 + 4 x 3 , \min \quad \frac{2+x_{1}}{1+x_{2}}-3 x_{1}+4 x_{3} \text {, } min1+x22+x1−3x1+4x3, s . t . 0.1 ≤ x i ≤ 0.9 , i = 1 , 2 , 3 s.t. \quad 0.1 \leq x_{i} \leq 0.9, \quad i=1,2,3 s.t.0.1≤xi≤0.9,i=1,2,3 from scipy.optimize import minimize from numpy import ones def obj(x): x1,x2,x3=x return (2+x1)/(1+x2)-3*x1+4*x3 LB=[0.1]*3; UB=[0.9]*3 bound=tuple(zip(LB, UB)) res=minimize(obj,ones(3),bounds=bound) print(res.fun,'\n',res.success,'\n',res.x) #输出最优值、求解状态、最优解 -0.7736842105263159 True [0.9 0.9 0.1] 例 2max z = x 1 2 + x 2 2 + 3 x 3 2 + 4 x 4 2 + 2 x 5 2 − 8 x 1 − 2 x 2 − 3 x 3 − x 4 − 2 x 5 , s.t. { x 1 + x 2 + x 3 + x 4 + x 5 ≤ 400 , x 1 + 2 x 2 + 2 x 3 + x 4 + 6 x 5 ≤ 800 2 x 1 + x 2 + 6 x 3 ≤ 200 x 3 + x 4 + 5 x 5 ≤ 200 0 ≤ x i ≤ 99 , i = 1 , 2 , ⋯ , 5. \begin{gathered} \max z=x_{1}^{2}+x_{2}^{2}+3 x_{3}^{2}+4 x_{4}^{2}+2 x_{5}^{2}-8 x_{1}-2 x_{2}-3 x_{3}-x_{4}-2 x_{5}, \\ \text { s.t. }\left\{\begin{array}{l} x_{1}+x_{2}+x_{3}+x_{4}+x_{5} \leq 400, \\ x_{1}+2 x_{2}+2 x_{3}+x_{4}+6 x_{5} \leq 800 \\ 2 x_{1}+x_{2}+6 x_{3} \leq 200 \\ x_{3}+x_{4}+5 x_{5} \leq 200 \\ 0 \leq x_{i} \leq 99, \quad i=1,2, \cdots, 5 . \end{array}\right. \end{gathered} maxz=x12+x22+3x32+4x42+2x52−8x1−2x2−3x3−x4−2x5, s.t. ⎩ ⎨ ⎧x1+x2+x3+x4+x5≤400,x1+2x2+2x3+x4+6x5≤8002x1+x2+6x3≤200x3+x4+5x5≤2000≤xi≤99,i=1,2,⋯,5. from scipy.optimize import minimize import numpy as np c1=np.array([1,1,3,4,2]); c2=np.array([-8,-2,-3,-1,-2]) A=np.array([[1,1,1,1,1],[1,2,2,1,6], [2,1,6,0,0],[0,0,1,1,5]]) b=np.array([400,800,200,200]) obj=lambda x: np.dot(-c1,x**2)+np.dot(-c2,x) # np.dot()向量点乘或矩阵乘法 cons={'type':'ineq','fun':lambda x:b-A@x} bd=[(0,99) for i in range(A.shape[1])] #res=minimize(obj,np.ones(5)*90,constraints=cons,bounds=bd) res=minimize(obj,np.ones(5),constraints=cons,bounds=bd) print(res.fun) print(res.success) print(res.x) -42677.56889347886 True [0.00000000e+00 1.43988405e-12 3.33333334e+01 9.90000000e+01 1.35333333e+01]本题只能求得局部最优解,可使用不同初值尝试求解 2. cvxopt.solvers 模块求解二次规划 标准型:min 1 2 x T P x + q T x , s.t. { A x ≤ b , A e q ⋅ x = b e q . \begin{gathered} \min \quad \frac{1}{2} x^{T} P x+q^{T} x, \\ \text { s.t. }\left\{\begin{array}{l} A x \leq b, \\ A e q \cdot x=b e q . \end{array}\right. \end{gathered} min21xTPx+qTx, s.t. {Ax≤b,Aeq⋅x=beq. 调用方式: import numpy as np from cvxopt import matrix,solvers sol=solvers.qp(P,q,A,b,Aeq,beq) #二次规划 ''' 输入到cvxopt.solvers的矩阵 P,q,A,b,Aeq,beq 都是 cvxopt.matrix 形式 在程序中虽然没有直接使用 NumPy 库中的函数,也要加载 数据如果全部为整型数据,也必须写成浮点型数据 cvxopt.matrix(array,dims) 把array按照dims重新排成矩阵 省略dims: 如果array为np.array, 则为其原本形式; 如果array为list, 则认为 list 中用逗号分隔开的为一"列" ''' print(sol['x']) #最优解 print(sol['primal objective']) #最优值 例 3min z = 1.5 x 1 2 + x 2 2 + 0.85 x 3 2 + 3 x 1 − 8.2 x 2 − 1.95 x 3 , s.t. { x 1 + x 3 ≤ 2 − x 1 + 2 x 2 ≤ 2 x 2 + 2 x 3 ≤ 3 x 1 + x 2 + x 3 = 3 \begin{gathered} \min \quad z=1.5 x_{1}^{2}+x_{2}^{2}+0.85 x_{3}^{2}+3 x_{1}-8.2 x_{2}-1.95 x_{3}, \\ \text { s.t. }\left\{\begin{array}{l} x_{1}+x_{3} \leq 2 \\ -x_{1}+2 x_{2} \leq 2 \\ x_{2}+2 x_{3} \leq 3 \\ x_{1}+x_{2}+x_{3}=3 \end{array}\right. \end{gathered} minz=1.5x12+x22+0.85x32+3x1−8.2x2−1.95x3, s.t. ⎩ ⎨ ⎧x1+x3≤2−x1+2x2≤2x2+2x3≤3x1+x2+x3=3 解: P = [ 3 0 0 0 2 0 0 0 1.7 ] , q = [ 3 − 8.2 − 1.95 ] , A = [ 1 0 1 − 1 2 0 0 1 2 ] , b = [ 2 2 3 ] , \begin{gathered} P=\left[\begin{array}{ccc} 3 & 0 & 0 \\ 0 & 2 & 0 \\ 0 & 0 & 1.7 \end{array}\right], q=\left[\begin{array}{c} 3 \\ -8.2 \\ -1.95 \end{array}\right], A=\left[\begin{array}{ccc} 1 & 0 & 1 \\ -1 & 2 & 0 \\ 0 & 1 & 2 \end{array}\right], b=\left[\begin{array}{l} 2 \\ 2 \\ 3 \end{array}\right], \\ \end{gathered} P=⎣ ⎡300020001.7⎦ ⎤,q=⎣ ⎡3−8.2−1.95⎦ ⎤,A=⎣ ⎡1−10021102⎦ ⎤,b=⎣ ⎡223⎦ ⎤, A e q = [ 1 , 1 , 1 ] , b e q = [ 3 ] . A e q=[1,1,1], \quad b e q=[3] . Aeq=[1,1,1],beq=[3]. import numpy as np from cvxopt import matrix,solvers n=3; P=matrix(0.,(n,n)); #零矩阵 P[::n+1]=[3,2,1.7]; #对角元变为3, 2, 1.7 q=matrix([3,-8.2,-1.95]) A=matrix([[1.,0,1],[-1,2,0],[0,1,2]]).T b=matrix([2.,2,3]) Aeq=matrix(1.,(1,n)); beq=matrix(3.) s=solvers.qp(P,q,A,b,Aeq,beq) print("最优解为:",s['x']) print("最优值为:",s['primal objective']) pcost dcost gap pres dres 0: -1.3148e+01 -4.4315e+00 1e+01 1e+00 9e-01 1: -6.4674e+00 -7.5675e+00 1e+00 2e-16 1e-16 2: -7.1538e+00 -7.1854e+00 3e-02 1e-16 4e-16 3: -7.1758e+00 -7.1761e+00 3e-04 1e-16 2e-15 4: -7.1760e+00 -7.1760e+00 3e-06 5e-17 2e-15 Optimal solution found. 最优解为: [ 8.00e-01] [ 1.40e+00] [ 8.00e-01] 最优值为: -7.1759977687772745 3. cvxpy 库使用方式与这里相似,只需选择支持的求解器即可 例 4min z = x 1 2 + x 2 2 + 3 x 3 2 + 4 x 4 2 + 2 x 5 2 − 8 x 1 − 2 x 2 − 3 x 3 − x 4 − 2 x 5 , s.t. { 0 ≤ x i ≤ 99 , 且 x i 为整数 ( i = 1 , ⋯ , 5 ) , x 1 + x 2 + x 3 + x 4 + x 5 ≤ 400 , x 1 + 2 x 2 + 2 x 3 + x 4 + 6 x 5 ≤ 800 2 x 1 + x 2 + 6 x 3 ≤ 200 x 3 + x 4 + 5 x 5 ≤ 200. \begin{gathered} \min \quad z=x_{1}^{2}+x_{2}^{2}+3 x_{3}^{2}+4 x_{4}^{2}+2 x_{5}^{2}-8 x_{1}-2 x_{2}-3 x_{3}-x_{4}-2 x_{5}, \\ \text { s.t. }\left\{\begin{array}{l} 0 \leq x_{i} \leq 99, \text { 且 } x_{i} \text { 为整数 }(i=1, \cdots, 5), \\ x_{1}+x_{2}+x_{3}+x_{4}+x_{5} \leq 400, \\ x_{1}+2 x_{2}+2 x_{3}+x_{4}+6 x_{5} \leq 800 \\ 2 x_{1}+x_{2}+6 x_{3} \leq 200 \\ x_{3}+x_{4}+5 x_{5} \leq 200 . \end{array}\right. \end{gathered} minz=x12+x22+3x32+4x42+2x52−8x1−2x2−3x3−x4−2x5, s.t. ⎩ ⎨ ⎧0≤xi≤99, 且 xi 为整数 (i=1,⋯,5),x1+x2+x3+x4+x5≤400,x1+2x2+2x3+x4+6x5≤8002x1+x2+6x3≤200x3+x4+5x5≤200. import cvxpy as cp import numpy as np c1=np.array([1, 1, 3, 4, 2]) c2=np.array([-8, -2, -3, -1, -2]) a=np.array([[1, 1, 1, 1, 1], [1, 2, 2, 1, 6], [2, 1, 6, 0, 0], [0, 0, 1, 1, 5]]) b=np.array([400, 800, 200, 200]) x=cp.Variable(5,integer=True) obj=cp.Minimize(c1@(x**2)+c2@x) con=[0 |
【本文地址】
今日新闻 |
推荐新闻 |