步进电机原理及参数详解 |
您所在的位置:网站首页 › 马达型号对照表大全图 › 步进电机原理及参数详解 |
步进电机原理及参数详解
|
步进电机常见型号:20,28,35,39,42,57,86等,功能大同小异,差异主要点在尺寸和输出力的大小不一样。下面我们以57为例详细说明其原理。 步进电机常见和用到最多的是2相步进电机,也有3,5相等,用量较少,驱动器价格昂贵,一般一些特殊场景才会使用。 1. 为什么叫20,28,35,39,42,57,86步进电机? 以上是一款比较有代表意义的57步进电机的参数,逐一解释如下: 电机型号:57BYG250C=》产品型号,不同厂家可能不同,没有任何标准 机身长度:76mm =》电机机身的长度,可变,没有要求一定是这么多 出轴长度:21mm =》转动轴的伸出来部分的长度 出轴轴径:8mm/6.35mm)=》转动轴的直径,常规就这几个尺寸,行业事实标准,你不要去搞个9mm的设计,可能就买不到电机。 使用电流:3A =》电机工作的最大电流,电流的大小决定了力矩的大小,也影响到你后面驱动器的选择–最少你得选择一个能提供这么大电流的驱动器吧? 输出力矩:1.8Nm(牛米)==》最大电流的时候输出的力矩 出线方式: 二相四根引出线 (黑色A+绿色A-红色B+蓝色B-) =》两项电机,一个相要两根线,总的出4根线,没得啥好说的吧? 出轴方式:轴径8毫米+单扁丝 =》这个也有两头出轴的,购买的时候要看清楚 步距角:1.8° =》给一个脉冲电机旋转的角度。那么转一圈是多少个脉冲?转一圈是360°,360/1.8=200.对的,就是200个脉冲就转一圈。只与个数相关,和速度无关,也就是说你一分钟给200脉冲和1秒钟给200脉冲,电机都只会转一圈 3. 什么是微步,细分? 微步指的是电机的一种驱动方法,细分是一个动作: 如上电机,我们给一个脉冲电机就转动1.8°,那么我们得到的旋转角度就只能是1.8的倍数。这个在很多场合是满足不了需求的,我要转1°位置怎么办?微步驱动就是解决这个问题的。 常规情况驱动器在给这个脉冲的时候,输出的是满电流给励磁线圈,电机就完整的按照设计转动1.8°。那么我们如果只输出75%的电流呢?是不是电机就只转动75%的位置(因为励磁电流的大小决定了力矩)。依次类推,我们可以给出50%,25%,0%的驱动电流,电机才会完成一个步距的位置变化,每一次旋转角度就变为1.8/4=0.45°了。 公式:电机旋转的角度=步距角/细分数 把一个步距分成4个阶段,这个动作就是细分,叫4细分。 如果再把这个过程细分,比如8,16,32等等就可以得到跟精确的位置。相对应的我们原来转一圈要200个脉冲(注意,不同电机有差别啊),那么4细分就要输入800个脉冲,8细分就要1600个脉冲。 看图说话-你购买的步进电机驱动器一般就有这个参数调整表: 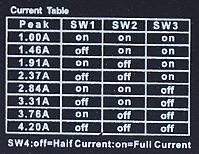 驱动器接线图 不同厂家的驱动器可能有细微的差异,但是也大同小异,使用的时候根据厂家说明书为准。 驱动器接线图 不同厂家的驱动器可能有细微的差异,但是也大同小异,使用的时候根据厂家说明书为准。 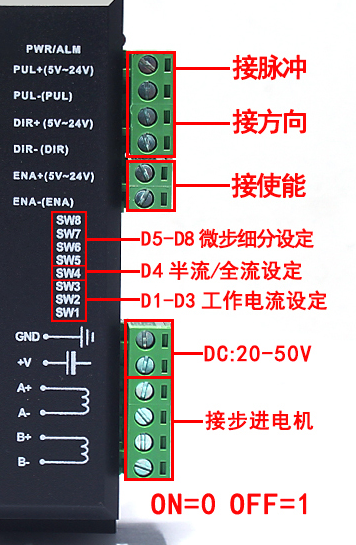 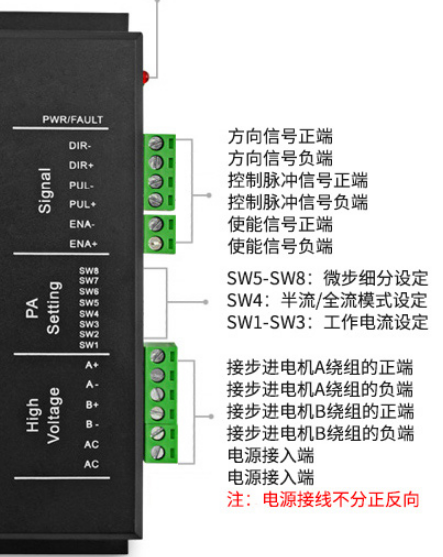 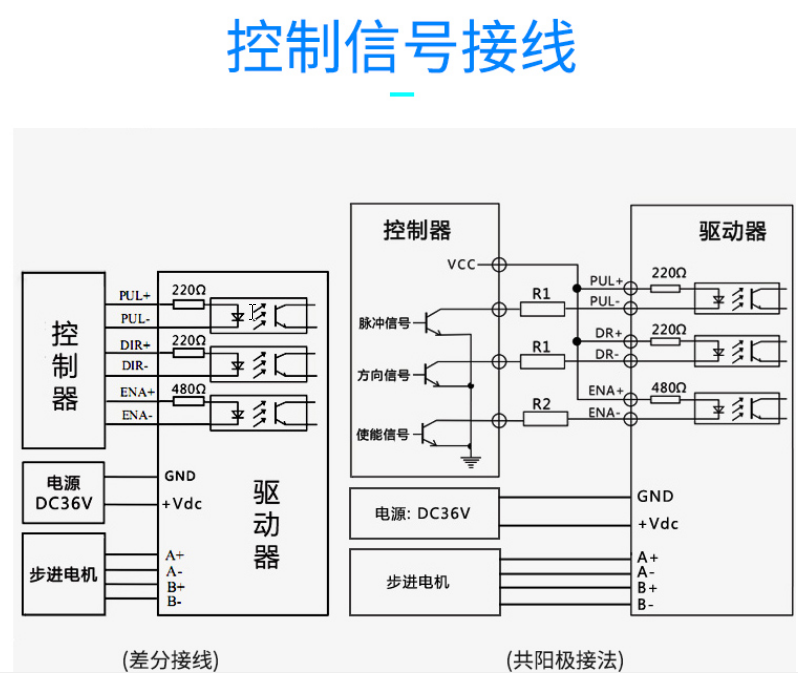
7. 其他问题:此主题我逐渐补充,有需要了解的在评论区留言
|
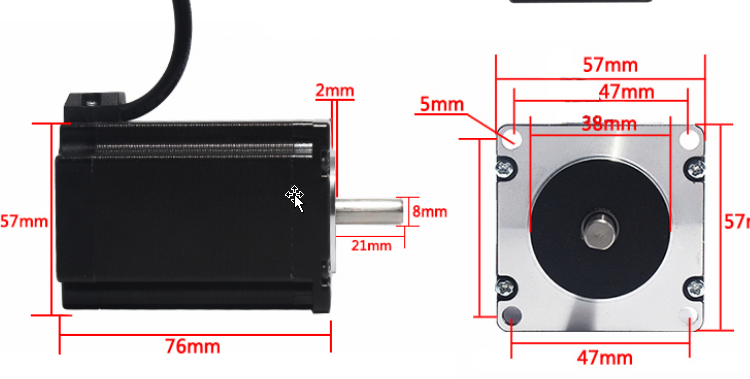
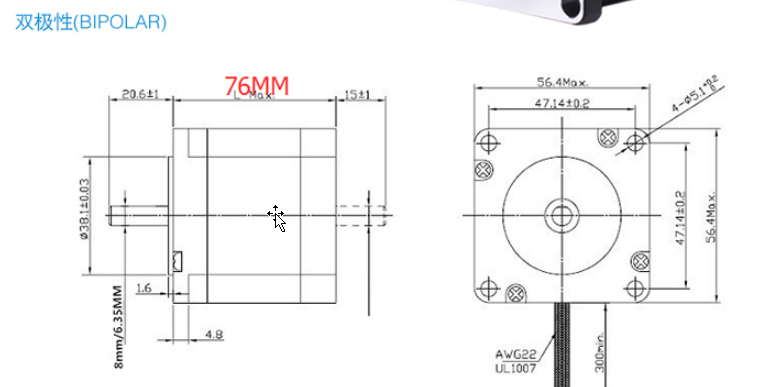 看图说话最好使,所谓57就是指的电机的端盖外形尺寸是57mm的正方形(不同电机可能有微小的差异),其安装孔距47mm。你要问为什么是57mm,没有为什么,行业逐渐积累,形成的事实标准而已,没有谁强制规定不可以是58mm,但是估计你生产出来的电机就很难和别人的兼容了,如果孔距变了,更是无法安装,那谁会买你的呢?是不是你也就只能跟随而“随波逐流”了? 当然,电机机身的长度和轴的长度,直径这些尺寸会有一些一样,就会演变出来一些变体,在设计的时候要注意选择。 2. 电机参数
看图说话最好使,所谓57就是指的电机的端盖外形尺寸是57mm的正方形(不同电机可能有微小的差异),其安装孔距47mm。你要问为什么是57mm,没有为什么,行业逐渐积累,形成的事实标准而已,没有谁强制规定不可以是58mm,但是估计你生产出来的电机就很难和别人的兼容了,如果孔距变了,更是无法安装,那谁会买你的呢?是不是你也就只能跟随而“随波逐流”了? 当然,电机机身的长度和轴的长度,直径这些尺寸会有一些一样,就会演变出来一些变体,在设计的时候要注意选择。 2. 电机参数  57步进电机参数: 电机型号:57BYG250C 机身长度:76mm 出轴长度:21mm 出轴轴径:8mm/6.35mm) 使用电流:3A 输出力矩:1.8Nm(牛米) 出线方式: 二相四根引出线 (黑色A+绿色A-红色B+蓝色B-) 出轴方式:默认●轴径8毫米+单扁丝
57步进电机参数: 电机型号:57BYG250C 机身长度:76mm 出轴长度:21mm 出轴轴径:8mm/6.35mm) 使用电流:3A 输出力矩:1.8Nm(牛米) 出线方式: 二相四根引出线 (黑色A+绿色A-红色B+蓝色B-) 出轴方式:默认●轴径8毫米+单扁丝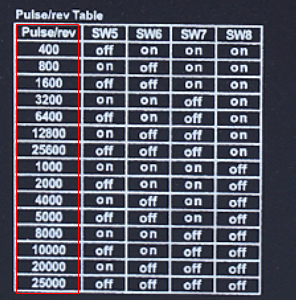 4. 细分还有什么好处呢? 1)细分提高了定位精度。角度变小,毫无疑问的吧? 2)细分还能能够大大提高电机的运转性能,以二相混合式步进电机为例,如果电机额定电流是5A,采用常规驱动方式时,电机每运行一次,其绕组相电流将从0突变至5A或从5A变为0,这种电流的突然变化,势必会引起电机运行的振动。若采用细分技术,如果是50细分的话,电机没运行一步,其绕组相电流变化只要0.1A,这样可以大大改善电机的振动情况。 3)同时细分后,电机的输出力矩实际上是增加的,特别是对于三相式反应时电机,其力矩比不细分时提高约30-40%
4. 细分还有什么好处呢? 1)细分提高了定位精度。角度变小,毫无疑问的吧? 2)细分还能能够大大提高电机的运转性能,以二相混合式步进电机为例,如果电机额定电流是5A,采用常规驱动方式时,电机每运行一次,其绕组相电流将从0突变至5A或从5A变为0,这种电流的突然变化,势必会引起电机运行的振动。若采用细分技术,如果是50细分的话,电机没运行一步,其绕组相电流变化只要0.1A,这样可以大大改善电机的振动情况。 3)同时细分后,电机的输出力矩实际上是增加的,特别是对于三相式反应时电机,其力矩比不细分时提高约30-40%
【本文地址】
今日新闻 |
推荐新闻 |