【自动控制理论(一)】对PID控制的理解 |
您所在的位置:网站首页 › 非线性色谱理论是什么 › 【自动控制理论(一)】对PID控制的理解 |
【自动控制理论(一)】对PID控制的理解
|
PID公式
有了PID控制,系统的输入和输出间的具体关系就不重要了。PID最好还是线性,非线性需要根据情况改变pid系数,比如某个既不是线性也不是单调的系统,输出与输入间的关系为——二次函数: y = ( u − 1 ) 2 y=(u-1)^2 y=(u−1)2 想让这个函数达到一个稳定的值y=4,初始状态为u=0,y=1。 假设不知道内部的关系是什么,只知道参考值4比初值1要大,可以先随便设个系数。 用matlab模拟该系统: clc,clear; ref = 4; err = 0; err_last = 0; integral = 0; y(1) = 1; u(1) = 0; for i=1:60 err = ref-y(i); integral = integral+err; u(i+1) = 0.05*err+0.05*(err-err_last)+0.05*integral; err_last = err; y(i+1) = (u(i+1)-1).^2; end i=1:61; plot(i,u); hold on; plot(i,y); grid on; xlabel('采样次数'); ylabel('u and y'); legend('u','y');结果为: |
 以上是离散PID计算公式,PID的连续和离散,以及离散中的位置和增量,原理上都是完全一样的。一般控制都是离散PID,而且离散的表达形式更加直观,这里只给出离散的形式。
以上是离散PID计算公式,PID的连续和离散,以及离散中的位置和增量,原理上都是完全一样的。一般控制都是离散PID,而且离散的表达形式更加直观,这里只给出离散的形式。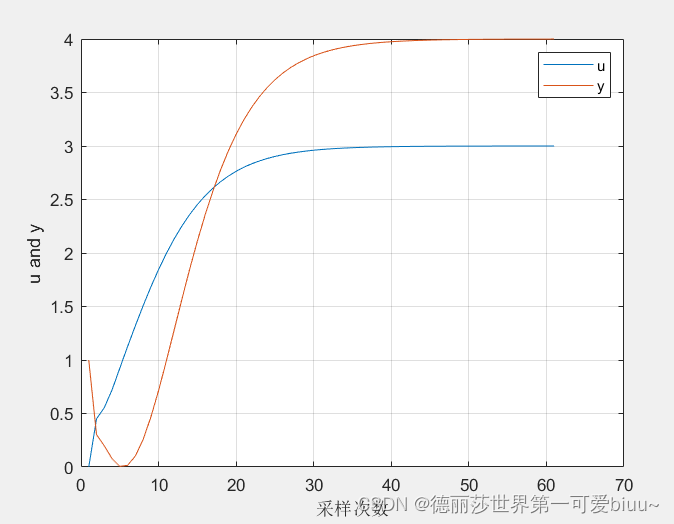 2. 如果初始状态为u=5,y=16。
2. 如果初始状态为u=5,y=16。 虽然也能调节到参考值,但是u在最开始的时候变为了负。而且根据计算,y的初值比参考值大,误差为负,那么第一次采样的时候,u必为负。如果某些系统的输入不能为负,就可能出现问题。这种问题也很容易解决,给u加上限值即可,只允许u在这个范围内变化,一是为系统安全考虑,二是避免PID调节失败。比如虽然第一次采样后u被调为负,但是由于系统对u有限制,只能调到0,那么y=1,之后就会重复之前u=0,y=1的调节过程。 3. 如果初始状态为u=0,y=1,参考值为0 使用同样的pid系数就完全调不了了:
虽然也能调节到参考值,但是u在最开始的时候变为了负。而且根据计算,y的初值比参考值大,误差为负,那么第一次采样的时候,u必为负。如果某些系统的输入不能为负,就可能出现问题。这种问题也很容易解决,给u加上限值即可,只允许u在这个范围内变化,一是为系统安全考虑,二是避免PID调节失败。比如虽然第一次采样后u被调为负,但是由于系统对u有限制,只能调到0,那么y=1,之后就会重复之前u=0,y=1的调节过程。 3. 如果初始状态为u=0,y=1,参考值为0 使用同样的pid系数就完全调不了了: 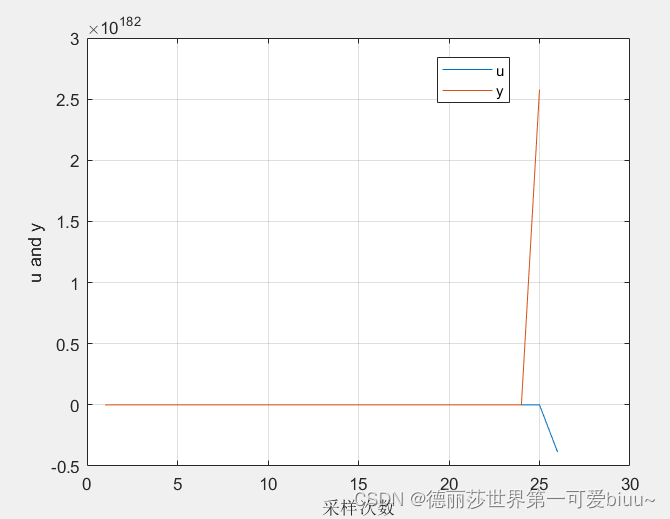 这是因为调节方向完全反了,即使加了限制,也不可行。比如若限制
0
<
=
u
<
=
5
0
这是因为调节方向完全反了,即使加了限制,也不可行。比如若限制
0
<
=
u
<
=
5
0【本文地址】
今日新闻 |
推荐新闻 |