【自动控制理论(二)】根轨迹法的概念,应用以及matlab实现 |
您所在的位置:网站首页 › 零极点个数相等根轨迹 › 【自动控制理论(二)】根轨迹法的概念,应用以及matlab实现 |
【自动控制理论(二)】根轨迹法的概念,应用以及matlab实现
|
文章目录
根轨迹法的概念根轨迹的应用稳态误差主导极点稳定性与快速性零点极点抵消开环零点极点对根轨迹的影响闭环零点的影响
MATLAB画根轨迹
根轨迹法的概念
当控制系统的闭环传递函数的分母的阶数较高时,它的根就难以计算。现代的计算软件,再高的阶数也能通过数值方法解出来。而根轨迹法的主要功能在于:由开环传递函数知道参数变化时闭环极点的变化情况。 对于某控制系统: 画出根轨迹图后,就要在根轨迹上选定合适的闭环极点,然后把参数选成对应的值。选的时候要考虑稳定性,快速性和误差。 稳态误差对于稳态误差,一般输入都是阶跃信号,对于阶跃信号,稳态误差与下面的式子有关: lim s → 0 d e n 1 d e n 2 d e n 1 d e n 2 + n u m 1 n u m 2 \displaystyle\lim_{s \rightarrow 0}\frac{den1den2}{den1den2+num1num2} s→0limden1den2+num1num2den1den2 为了让稳态误差=0,den1den2也就是开环传函的分母中得有一个单独的s,也就是说开环传函得有至少一个极点在原点,也就是所谓的在控制器中加一个积分环节减小稳态误差。 主导极点主导极点就是离虚轴最近的闭环极点 稳定性与快速性闭环极点离虚轴越远,稳定性越好,越快。 主导极点与原点的连线与负实轴的夹角不要太大,设计在45度左右,否则稳定性变差。 零点极点抵消可把闭环零点放在不想要的闭环极点旁边,以抵消极点的作用。 开环零点极点对根轨迹的影响根轨迹始于开环极点,终于开环零点。如果极点零点数量不等,那就有部分根轨迹会到无穷远处,这就需要确定渐近线了。 对于开环零点,极点个数不相等的情况,肯定是极点比零点个数多。这样就会有部分根轨迹从部分极点出发,终于无穷远处。零点比极点多的系统不存在。 加零点,加极点,改零点,改极点,肯定会改变根轨迹,以至于改变系统动态性能。 加开环零点,会让一根本来结束于无穷远处的根轨迹结束于该零点,如果这根轨迹本来向左半平面的无穷远处延伸,加了个零点反而会把它拉回来,就不利于稳定;但若该根轨迹本来向右半平面无穷远处延伸,加零点就可能让它回到左半平面。 开环零点与根轨迹相斥,零点在左半平面,终点在无穷远处的根轨迹就会向右边延伸,零点在右半平面,根轨迹向左边延伸。 增加开环极点,会让根轨迹向右延伸,对稳定不利。 闭环零点的影响闭环零点和根轨迹没有一点关系。 由闭环传函的表达式可知: 闭环零点=G(s)的零点+H(s)的极点 也就是闭环零点由一部分开环零点和一部分开环极点组成。因此闭环零点的影响就是开环零点和开环极点影响的一部分。 如果是单位负反馈系统,H(s)=1,那么闭环零点=开环零点。 MATLAB画根轨迹很简单: rlocus(num,den)%num是开环传函分子多项式,den是分母多项式 %或者: Go = tf(num,den);%定义开环传递函数 rlocus(Go) |
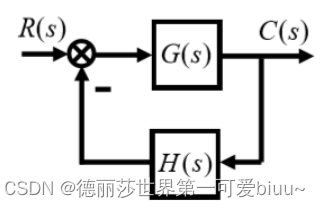 显然闭环传递函数:
G
c
(
s
)
=
G
(
s
)
1
+
G
(
s
)
H
(
s
)
G_c(s)=\frac{G(s)}{1+G(s)H(s)}
Gc(s)=1+G(s)H(s)G(s) 设G(s),H(s)的分子和分母多项式分别为:
G
(
s
)
=
n
u
m
1
d
e
n
1
G(s)=\frac{num1}{den1}
G(s)=den1num1
H
(
s
)
=
n
u
m
2
d
e
n
2
H(s)=\frac{num2}{den2}
H(s)=den2num2 所以闭环传函可表示为:
G
c
(
s
)
=
n
u
m
1
d
e
n
2
d
e
n
1
d
e
n
2
+
n
u
m
1
n
u
m
2
G_c(s)=\frac{num1den2}{den1den2+num1num2}
Gc(s)=den1den2+num1num2num1den2 特征方程为:
d
e
n
1
d
e
n
2
+
n
u
m
1
n
u
m
2
=
0
den1den2+num1num2=0
den1den2+num1num2=0 改写特征方程,除一个den1den2:
n
u
m
1
n
u
m
2
d
e
n
1
d
e
n
2
=
−
1
\frac{num1num2}{den1den2}=-1
den1den2num1num2=−1 令开环传递函数为:
G
o
(
s
)
=
n
u
m
d
e
n
=
G
(
s
)
H
(
s
)
=
n
u
m
1
n
u
m
2
d
e
n
1
d
e
n
2
G_o(s)=\frac{num}{den}=G(s)H(s)=\frac{num1num2}{den1den2}
Go(s)=dennum=G(s)H(s)=den1den2num1num2 所以特征方程就是:
G
o
(
s
)
=
−
1
G_o(s)=-1
Go(s)=−1 因此就有了相角条件:
p
h
a
s
e
(
G
o
(
s
)
)
=
18
0
∘
+
2
k
π
phase(G_o(s))=180^\circ+2k\pi
phase(Go(s))=180∘+2kπ 以及幅值条件:
∣
G
o
(
s
)
∣
=
1
|G_o(s)|=1
∣Go(s)∣=1 如果要考察的参数是开环传函的某一个乘数,那么它只会影响幅值,而相角与该参数没有关系。 除此之外,要考察的参数还有可能是传递函数中任意一个不是s的数,只要把特征方程改写好,就是一样的。 根轨迹的画法可以交给计算软件。
显然闭环传递函数:
G
c
(
s
)
=
G
(
s
)
1
+
G
(
s
)
H
(
s
)
G_c(s)=\frac{G(s)}{1+G(s)H(s)}
Gc(s)=1+G(s)H(s)G(s) 设G(s),H(s)的分子和分母多项式分别为:
G
(
s
)
=
n
u
m
1
d
e
n
1
G(s)=\frac{num1}{den1}
G(s)=den1num1
H
(
s
)
=
n
u
m
2
d
e
n
2
H(s)=\frac{num2}{den2}
H(s)=den2num2 所以闭环传函可表示为:
G
c
(
s
)
=
n
u
m
1
d
e
n
2
d
e
n
1
d
e
n
2
+
n
u
m
1
n
u
m
2
G_c(s)=\frac{num1den2}{den1den2+num1num2}
Gc(s)=den1den2+num1num2num1den2 特征方程为:
d
e
n
1
d
e
n
2
+
n
u
m
1
n
u
m
2
=
0
den1den2+num1num2=0
den1den2+num1num2=0 改写特征方程,除一个den1den2:
n
u
m
1
n
u
m
2
d
e
n
1
d
e
n
2
=
−
1
\frac{num1num2}{den1den2}=-1
den1den2num1num2=−1 令开环传递函数为:
G
o
(
s
)
=
n
u
m
d
e
n
=
G
(
s
)
H
(
s
)
=
n
u
m
1
n
u
m
2
d
e
n
1
d
e
n
2
G_o(s)=\frac{num}{den}=G(s)H(s)=\frac{num1num2}{den1den2}
Go(s)=dennum=G(s)H(s)=den1den2num1num2 所以特征方程就是:
G
o
(
s
)
=
−
1
G_o(s)=-1
Go(s)=−1 因此就有了相角条件:
p
h
a
s
e
(
G
o
(
s
)
)
=
18
0
∘
+
2
k
π
phase(G_o(s))=180^\circ+2k\pi
phase(Go(s))=180∘+2kπ 以及幅值条件:
∣
G
o
(
s
)
∣
=
1
|G_o(s)|=1
∣Go(s)∣=1 如果要考察的参数是开环传函的某一个乘数,那么它只会影响幅值,而相角与该参数没有关系。 除此之外,要考察的参数还有可能是传递函数中任意一个不是s的数,只要把特征方程改写好,就是一样的。 根轨迹的画法可以交给计算软件。【本文地址】