如此详细的尾灯模组方案,不看看吗? |
您所在的位置:网站首页 › 银行卡背面签名条要签名吗怎么办呢 › 如此详细的尾灯模组方案,不看看吗? |
如此详细的尾灯模组方案,不看看吗?
|
文章目录
尾灯电子功能需求基本功能:进阶功能:可选功能
尾灯LED需求尾灯驱动模组方案LED Driver介绍尾灯模组方案一尾灯模组方案二尾灯模组方案三
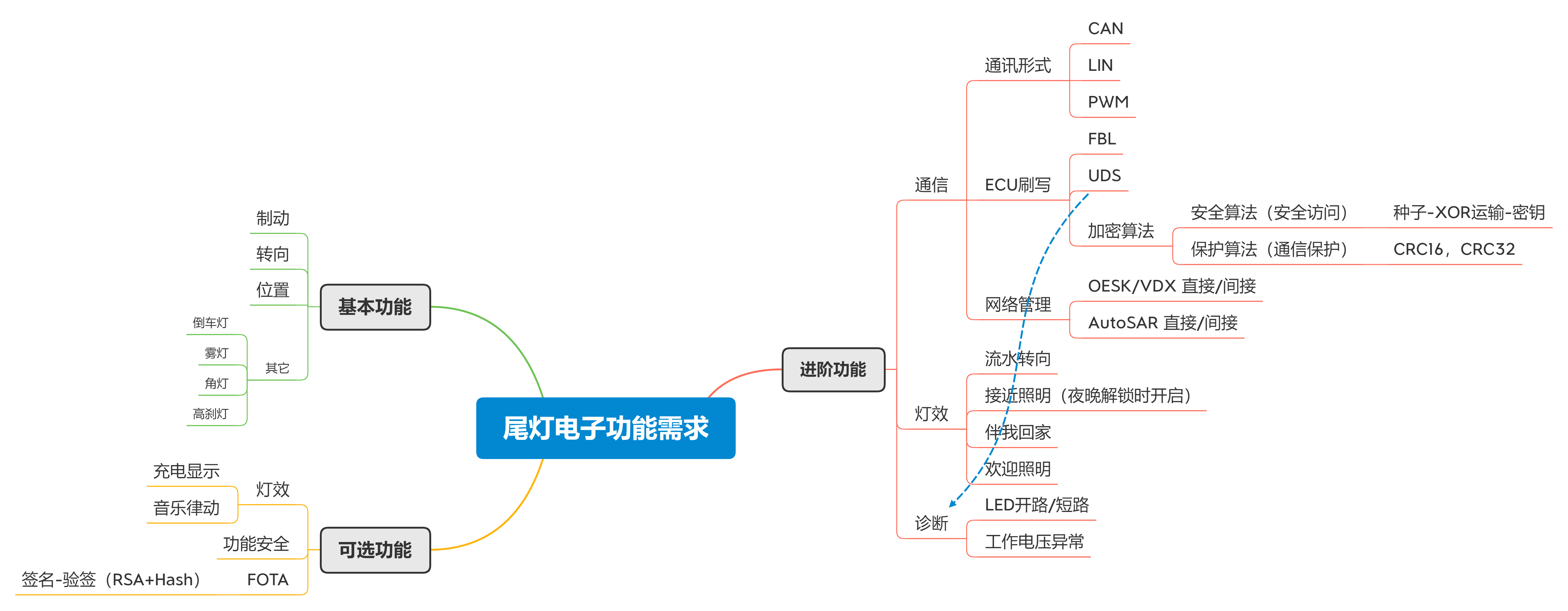
由于工作的原因,笔者对NXP,MPS,ELMOS这几家的芯片比较熟悉,对infenion和TI了解较少,所以本篇文章中涉及的芯片会偏前者多一些,不足之处还请见谅。 最近一段时间,笔者拜访了很多车灯供应商,在和他们沟通一些尾灯项目时发现,贯穿式尾灯的需求已经变的常见了,特别是新能源车厂,尤其青睐在尾门中间加贯穿式的位置灯。笔者不禁感慨,时代变了! 因此,笔者决定结合自己的工作经历,详细介绍下目前遇到的几种尾灯模组方案。 尾灯电子功能需求在谈尾灯模组方案之前,先梳理一下目前的汽车尾灯的电子功能需求,如下是整体的电子功能需求框图:
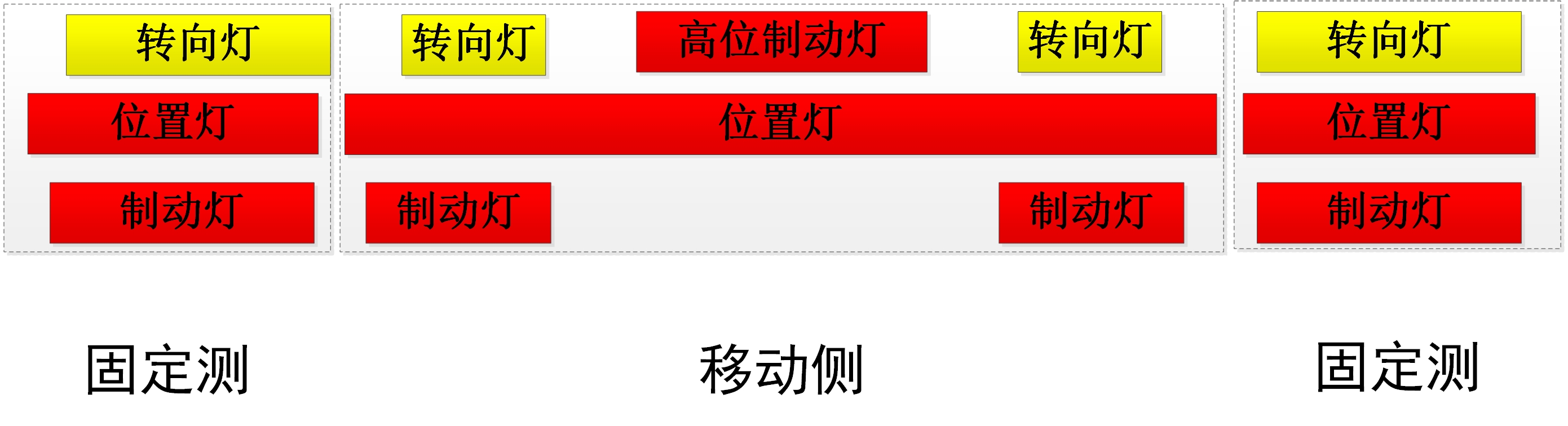
接下来结合上图,详细的介绍下电子功能需求: 基本功能: 一般情况下,转向,位置,制动三种功能的车灯统称为后组合尾灯,会包给一家车灯供应商做,角灯,雾灯,高刹灯等会分配给其他灯厂做,然后后组合尾灯提供几路高边来驱动后者。这么做的主要原因是,许多灯效需要转向,位置,制动一起配合,用一家来做后组合尾灯资源协调比较方便;而角灯,雾灯等不会参与灯效,只要其他灯厂成本更低,就会分给其他灯厂做。如果有功能安全的需求,高刹灯一般也会分配给做后组合灯的灯厂去做。 进阶功能:通信:现在大部分的尾灯模组都会要求CAN通讯或者LIN通讯,一旦用上了这两类汽车总线,那么车厂也会提出在线刷写,UDS诊断和网络管理的需求。 关于在线刷写,一般车厂的做法还是通过种子和密钥的对称加密方式实现安全算法。有些新能源车厂走的比较激进,需要和车上的网关配合实现FOTA的功能,对要刷写的应用层代码采用hash算法验证完整性,同时会使用RSA算法对前面算出来的hash值进行签名和验签,感觉如果以后其他车厂都这样学的话,做后装的尾灯灯厂生意很难做了。 关于诊断,因为车灯里面用的最多的就是LED,所以除了基本的ECU诊断需求(欠压,过压等)外,LED的开路和短路诊断也是必要的。发生LED开路或短路故障时,将信息存储在本地的DTC列表中,维修时通过OBD可以获取相关信息。 关于网络管理,一般就两种,OESK或者AutoSAR。如果只使用KL15供电的话,会比较简单,只要求间接网络管理。 灯效,目前除了基本的制动,转向和位置功能外,车厂会增加一些其他场景的效果。如迎宾,解锁,伴我回家等。更有甚者,会要求做音乐灯光秀,一般想要这种效果都需要专业的灯光师进行配合。 可选功能关于FOTA功能和音乐灯光秀上面已经提了,这里不在赘述。 现在遇到一些新能源车厂有时会要求在充电时做一些灯效,如正在充电时,贯穿灯显示从两边向中间的流水效果;充满电时,进行呼吸效果。尾灯后续的趋势是会上功能安全的,有些车厂已经对尾灯提出了功能安全的需求,但是这些车厂对尾灯的功能安全不太一样。目前遇到如下列表的两种需求,ASIL-A等级的灯需要能够上报故障,ASIL-B等级的灯需要有备用供电路径。 制动灯要求ASIL-B等级,位置灯和转向灯要求ASIL-A等级,其他灯不做要求;高刹灯要求ASIL-B等级,转向灯要求ASIL-A等级,其他灯不做要求。 尾灯LED需求其实LED严格上来说也属于电子物料,这里为了读者更容易理解后面的方案介绍,将LED的需求单拎出来讲一下。 以下图为例,是一个带贯穿式尾灯的后尾灯框图,其中:
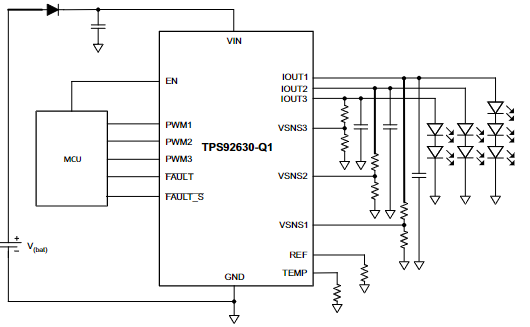
当然,也有一些厂家位置灯使用0.2W的红色LED,制动灯使用0.5W的红色LED;或者位置灯和制动灯复用,做制动灯功能时LED高亮。 尾灯驱动模组方案 LED Driver介绍由于很多驱动芯片的数据手册在芯片厂家官网没有释放,同时我手上的数据手册也是签了保密协议才拿到的,为了避免不必要的麻烦,下面引用的推荐电路图和协议时序图都是取自官网已经释放的芯片数据手册。 在介绍整体的模组方案之前,先单独针对LED Driver进行一些介绍。 LED Driver按输出方式分为两种: 一种是高边驱动方式,如E522.80,TPS92630这种芯片,输入端接12V电池,输出端接LED的阳极,不需要额外加DCDC,驱动芯片工作时热量会非常大,所以对这种芯片高温下的性能表现要求比较高。TPS92630的推荐电路如下图,一般用于驱动制动灯或者串数较少的转向灯。
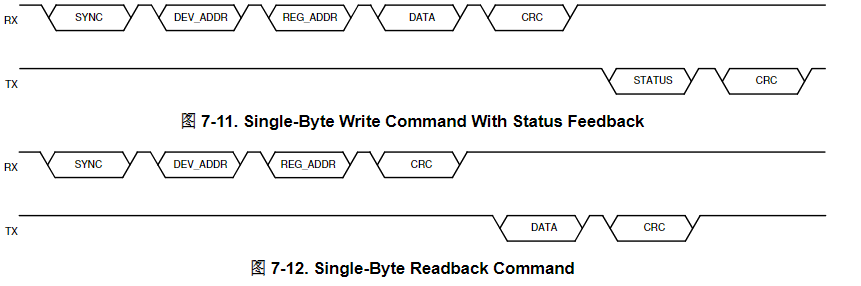
LED Driver除了按输出方式分之外,还可以按控制方式分,主要有模拟控制,PWM控制,SPI/IIC控制,以及最近新出来的差分总线方式,如TI的TPS929120,ELMOS的E522.49,MPS的MPQ7225,infenion的TLD7002。这种差分总线物理层上就是UART的物理层+CAN收发器,数据链路层的协议模仿LIN,由Break段(可选)+同步段+器件地址+寄存器地址+数据段+校验段组成。如下是TPS929120的FlexWire协议的时序图,其他芯片的协议和这个基本一致。
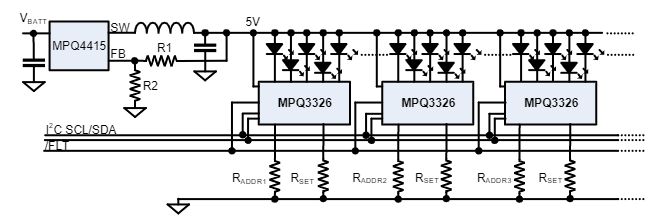
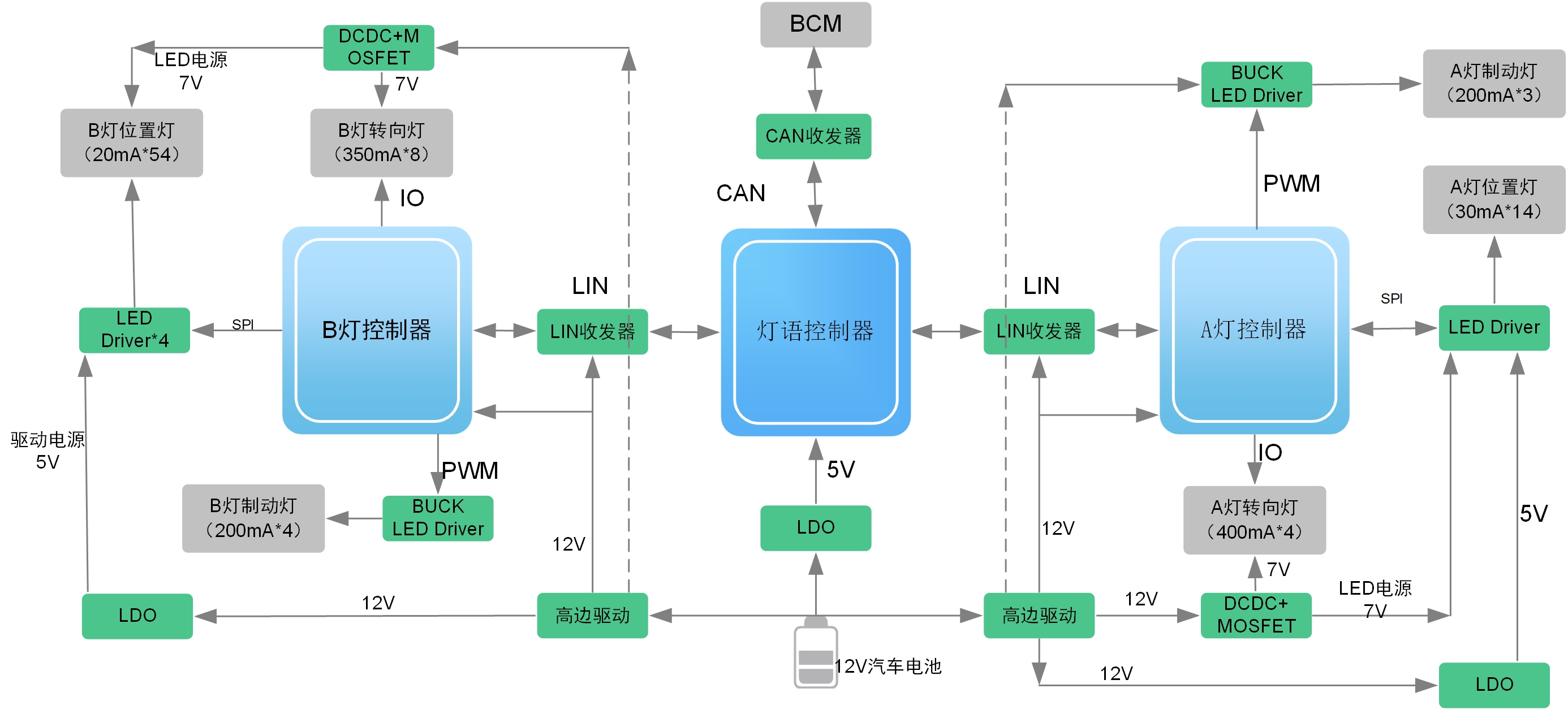
这种差分总线的控制方式越来越受欢迎,主要是因为这种方式可以采用板间通信,且EMC性能比SPI和IIC好很多。以E522.48和E522.49举例,如果使用E522.48,那么MCU必须要和E522.48在同一个板子上,因为IIC用在板间通信,EMC性能非常差,这种情况下就导致驱动板和灯驱之间的线束非常多。如果将E522.48换成E522.49,那么E522.49就可以放在灯板上,E522.49和MCU之间使用板间通信的差分总线,只要控制线束控制在50cm以内,一般的EMC测试要求都能满足,同时驱动板和灯板的线束也大大减少,只需要保留供电和差分总线的线束即可。如果想要在驱动板和灯板之间使用更长的线束,可以使用TPS929120+外置的CAN收发器或者TLD7002(其差分总线引脚对地的ESD达到8kV)。 尾灯模组方案一下图是第一种尾灯模组方案,由于篇幅限制,只放了一侧的A灯和B灯控制器。这种方案最大的特点是有一个灯语控制器,后尾灯内部的转向,制动,位置灯都由灯语控制器统一调度,同步信号也由灯语控制器给出。灯语控制器和A,B灯控制器之间使用LIN通讯,灯语控制器和外部的BCM使用CAN通讯。 这种方案减少了BCM和后尾灯之间的CAN通信负载率,灯效也可以做的更多,无需占用公共CAN总线资源。缺点是成本较高,同时对子节点的在线升级也比较麻烦。
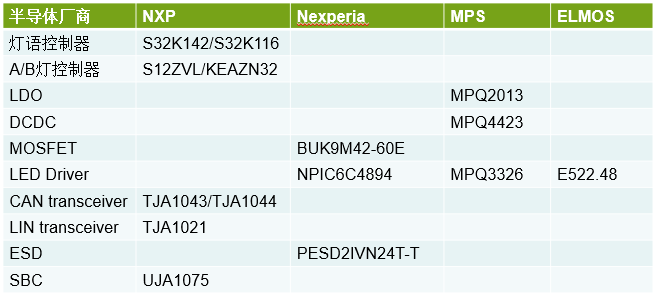
下表是上述方案中的推荐物料: 灯语控制器的主控推荐NXP的S32K1xx系列MCU; CAN,LIN收发器推荐NXP的TJA1044,TJA1043,TJA1021等,根据不同的功耗选择即可,infenion,TI也有性能接近或者pin2pin的物料; DCDC和LDO选择就比较广了,大家根据需求选择即可; 这个方案中LED Driver推荐MPQ3326和E522.48,因为控制器比较多,所以选择IIC接口的驱动芯片也是可以的; SBC这种集成方式在PCB面积受限或者需要limphome功能推荐选用。 尾灯模组方案二下图是第二种尾灯模组方案,左右固定测分别用一个控制器,移动侧使用一个控制器,三个控制器通过LIN通信的方式接入整车的网关或者BCM。车灯效果由网关/BCM统一调度,同步信号也由网关/BCM发出。 这种方式需要的尾灯控制器比较少,成本比较低,同时对子节点的在线升级也比较方便。但是由于是LIN通信,且使用的是公共LIN线,所以升级速度较慢,且不方便做音乐灯光秀。
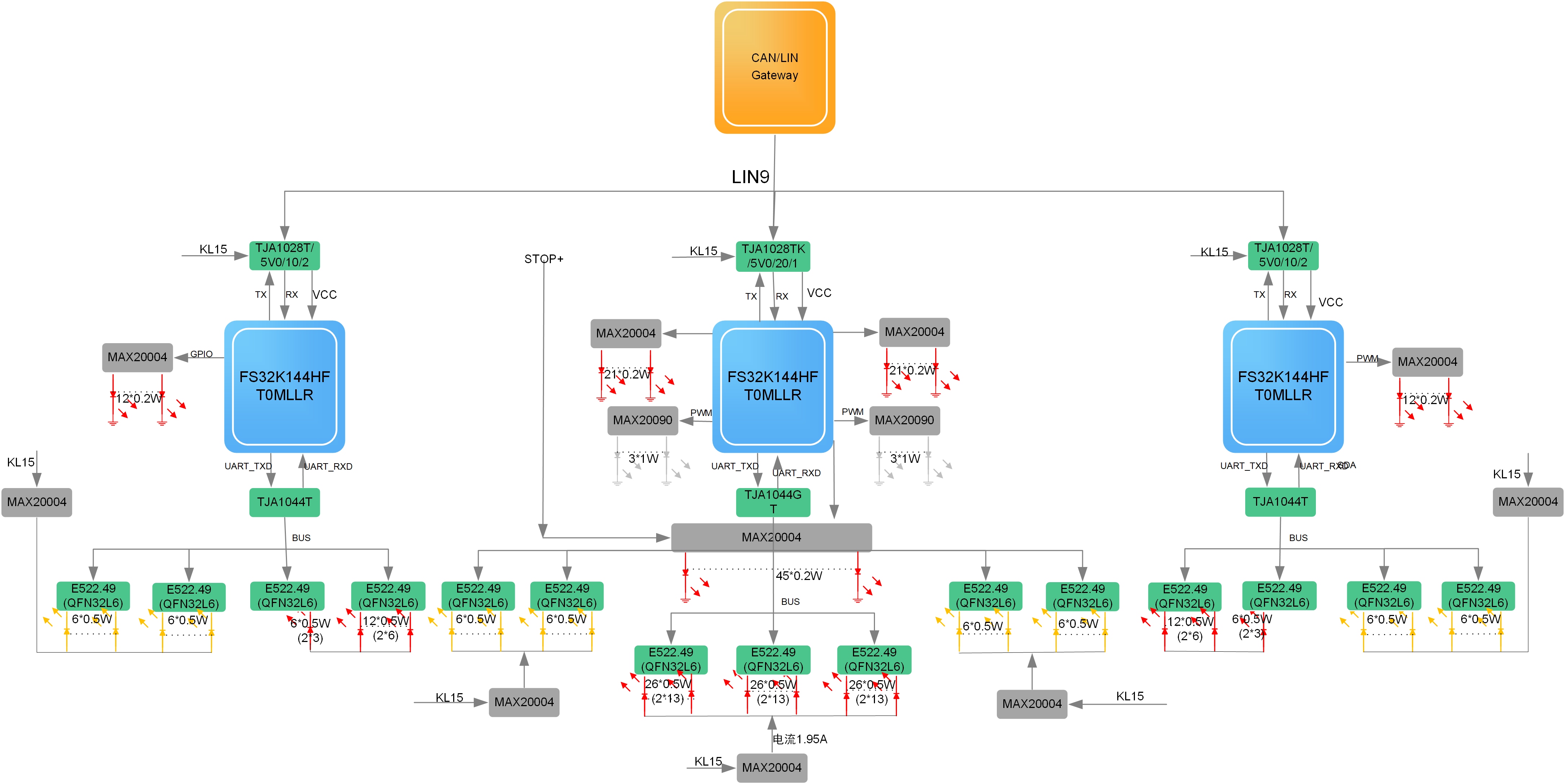
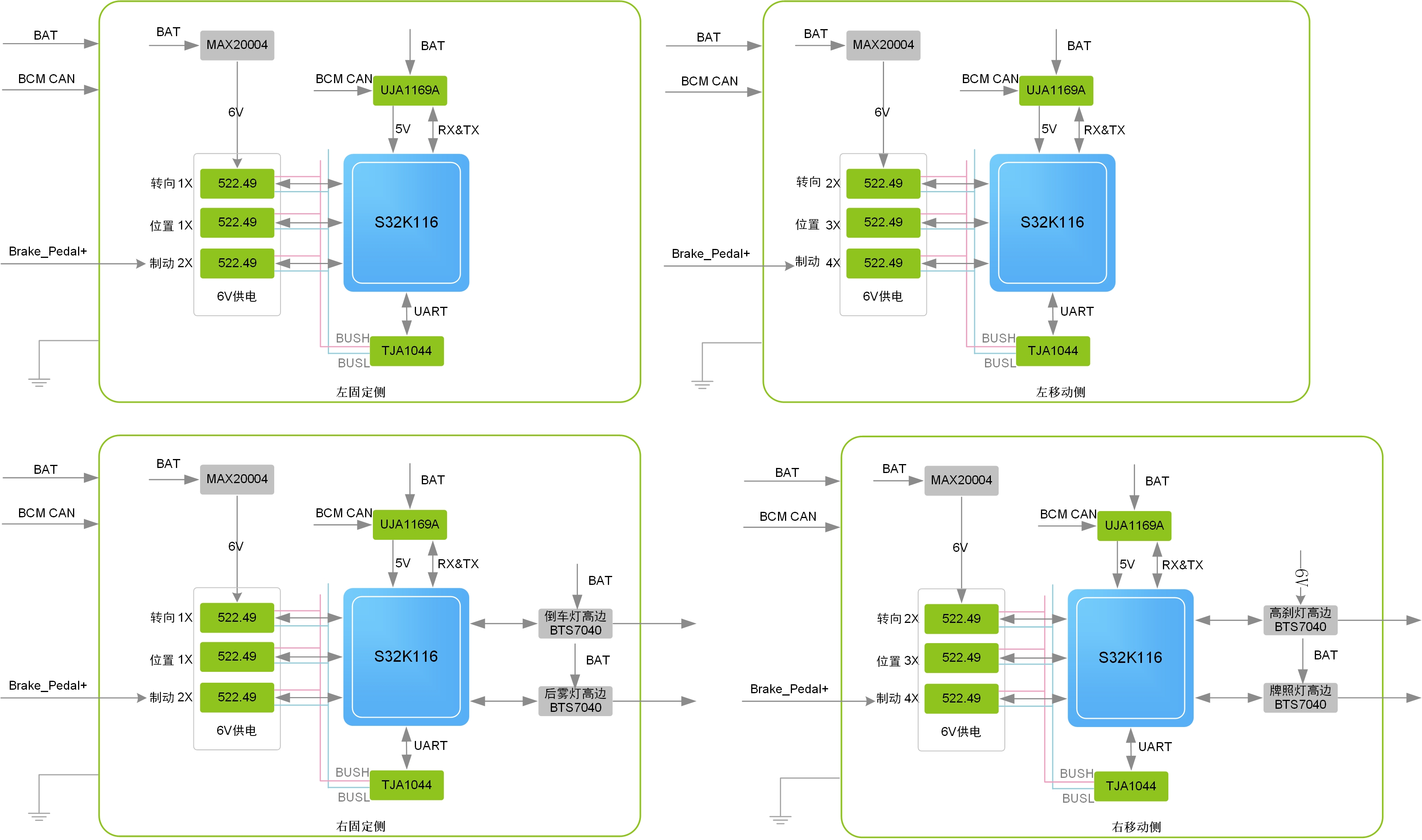
下图是第三种尾灯模组方案,左右固定测和左右移动侧分别使用一个控制器,通过CAN总线接入BCM。车灯效果由BCM统一调度,同步信号也由BCM发出。 这种方案的成本适中,因为使用了CAN总线,所以在线升级速度较快。同时四个控制器接入的是同一路CAN,BCM可以很好的控制他们,做音乐灯光秀比较方便。
以上就是尾灯模组方案的全部介绍了,如果觉得有用,帮忙点个再看呗!!! 更多内容,欢迎关注我的微信公众号: |

【本文地址】
今日新闻 |
推荐新闻 |