机器人学导论 二、正运动学,MDH法 |
您所在的位置:网站首页 › 连杆长度计算公式 › 机器人学导论 二、正运动学,MDH法 |
机器人学导论 二、正运动学,MDH法
|
机器人学导论 二、正运动学
前言关节与连杆编号
连杆参数连杆的描述连杆连接的描述关节变量
连杆坐标系中间连杆坐标系建立首尾连杆坐标系建立首坐标系尾坐标系
连杆参数与连杆坐标系连杆变换
MDH法使用步骤后记
前言
本篇学习机械臂的正运动学,MDH法。 关节与连杆关节joint,连杆link,是机械臂的基本组成结构。 关节包括转动关节和移动关节,一般仅有一个自由度。 一个关节把相邻两连杆连接,n个关节把n+1个连杆连接起来,具有n个自由度。 编号把固定基座作为第0个连杆,机械臂末端的连杆作为第n个连杆。 连杆参数 连杆的描述两个相邻关节轴之间的公垂线的长度,称为连杆的长度。 两个相邻关节轴之间形成的角度,称为连杆的转角。 连杆i-1的转角是其近端关节轴i-1与远端关节轴i形成的角度 α i − 1 \alpha_{i-1} αi−1,至于角度的正负号,可以根据后面建立坐标系时再确定。 连杆连接的描述两个相邻连杆之间的距离,称为连杆偏距。 两个相邻连杆绕公共关节轴旋转的夹角,称为关节角。
由于实际的连杆是弯曲的,可以将公垂线段 a i − 1 a_{i-1} ai−1和 a i a_i ai 看作代替曲连杆的直连杆i-1,i。 直连杆i-1,i之间的距离是关节i的连杆偏距 d i d_i di 直连杆i-1沿关节轴i旋转到直连杆i的角度是关节角 θ i \theta_i θi 关节变量一个连杆可以使用上面的连杆长度、连杆转角、连杆偏距、关节角四个参数确定。 对于转动关节,关节角可变,另三个参数不变。 对于移动关节,连杆偏距可变,另三个参数不变。 可变的参数称为关节变量。 连杆坐标系连杆坐标系用于描述相邻连杆之间的相对位置关系。 连杆坐标系编号与连杆编号相同,称为 { i } \{i\} {i}。 中间连杆坐标系建立为连杆i建立坐标系: 以关节轴i作为Z轴,以连杆i与Z轴的交点作为原点,以连杆i作为X轴指向关节轴i+1,以右手定则确定Y轴。 例外:如果连杆i的长度 a i = 0 a_i=0 ai=0(此时连杆i,i+1的Z轴相交),以交点作为原点,以两个Z轴所在平面的垂线作为X轴,方向可以有两种选择,而 α i \alpha_i αi的符号就由X轴方向决定。 每个坐标轴的建立都要满足右手定则。 首先找到所有的关节轴i-1,i 然后确定坐标系 { i − 1 } \{i-1\} {i−1},以关节轴作为 Z ^ i − 1 \hat Z_{i-1} Z^i−1,直连杆i-1作为 X ^ i − 1 \hat X_{i-1} X^i−1,再右手定则确定 Y ^ i − 1 \hat Y_{i-1} Y^i−1。 然后确定坐标系 { i } \{i\} {i}。 首尾连杆坐标系建立对于首尾连杆0,n,有特殊的建系方法。 首坐标系坐标系 { 0 } \{0\} {0}在基座上,一般作为参考系。 第一个关节变量为0时,规定坐标系 { 0 } \{0\} {0}于 { 1 } \{1\} {1}重合。 当第一个关节为转动关节, d 1 = 0 d_1=0 d1=0;第一个关节为移动关节, θ 1 = 0 \theta_1=0 θ1=0 尾坐标系坐标系 { n } \{n\} {n}的原点和x轴方向可以任意选取,但要尽量使得连杆参数为0。 连杆参数与连杆坐标系按照上面的建系方法,可以把连杆参数重新定义: a i a_i ai连杆长度:沿 X ^ i \hat X_i X^i,从 Z ^ i \hat Z_i Z^i移动到 Z ^ i + 1 \hat Z_{i+1} Z^i+1的距离 α i \alpha_i αi连杆扭转角:绕 X ^ i \hat X_i X^i轴,把 Z ^ i \hat Z_i Z^i旋转到 Z ^ i + 1 \hat Z_{i+1} Z^i+1的角度 d i d_i di连杆偏距:沿 Z ^ i \hat Z_i Z^i,从 X ^ i − 1 \hat X_{i-1} X^i−1移动到 X ^ i 1 \hat X_{i1} X^i1的距离 θ i \theta_i θi关节角:绕 Z ^ i \hat Z_i Z^i轴,把 X ^ i − 1 \hat X_{i-1} X^i−1旋转到 X ^ i \hat X_{i} X^i的角度设定 a i > 0 a_i>0 ai>0,其它参数可正可负。 上面建立连杆坐标系和连杆参数的方式称为MDH法(Modified Denavit–Hartenberg)。 DH法建立的坐标系并不是唯一的。 连杆变换连杆参数可用于相邻杆之间的相对位姿计算。 本篇是机器人学中的正运动学,采用的是MDH法。 后续会有Matlab示例编程。 |
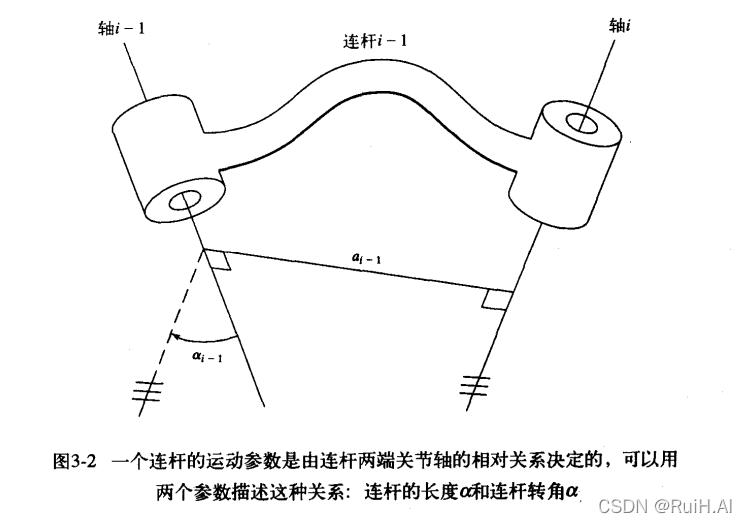 上图中,连杆i-1的长度是其近端关节轴i-1与远端关节轴i之间的公垂线长度
a
i
−
1
a_{i-1}
ai−1
上图中,连杆i-1的长度是其近端关节轴i-1与远端关节轴i之间的公垂线长度
a
i
−
1
a_{i-1}
ai−1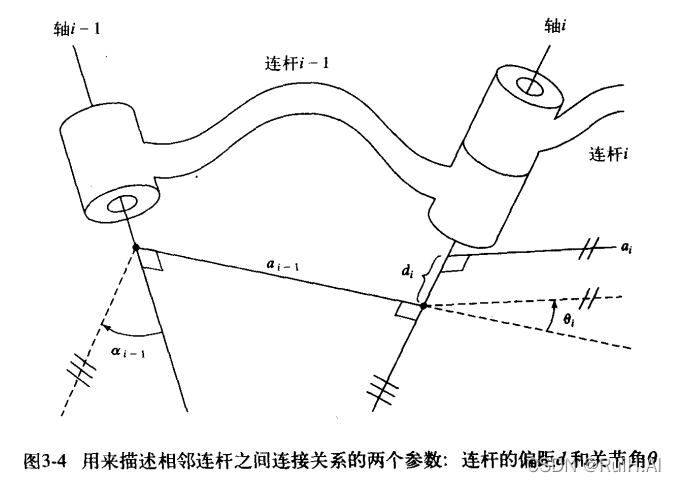 上图中,关节i是连杆i-1和连杆i的公共关节。
上图中,关节i是连杆i-1和连杆i的公共关节。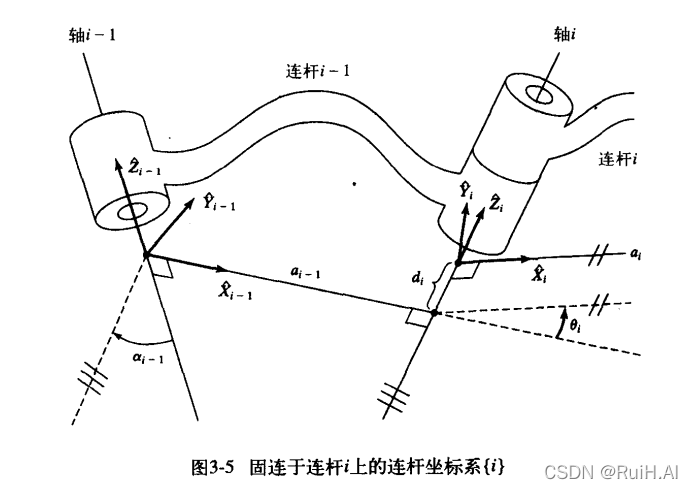 上图中,可以按这个顺序来建立坐标系:
上图中,可以按这个顺序来建立坐标系: 上图中,考虑坐标系
{
i
−
1
}
,
{
i
}
\{i-1\},\{i\}
{i−1},{i}之间的变换
i
−
1
i
T
^i_{i-1}T
i−1iT,建立中间坐标系
{
P
}
,
{
Q
}
,
{
R
}
\{P\},\{Q\},\{R\}
{P},{Q},{R},则有:
i
i
−
1
T
=
R
i
−
1
T
Q
R
T
P
Q
T
i
P
T
^{i-1}_iT = \ ^{i-1}_RT \ ^R_{Q}T \ ^Q_PT \ ^P_{i}T
ii−1T= Ri−1T QRT PQT iPT 上面的变换,可以看作是把
X
^
i
\hat X_i
X^i变换为
X
^
i
−
1
\hat X_{i-1}
X^i−1,则有:
i
i
−
1
T
=
R
X
(
α
i
−
1
)
D
X
(
a
i
−
1
)
R
Z
(
θ
i
)
D
Z
(
d
i
)
^{i-1}_iT = R_X(\alpha_{i-1})D_X(a_{i-1})R_Z(\theta_i)D_Z(d_i)
ii−1T=RX(αi−1)DX(ai−1)RZ(θi)DZ(di) 或者将每个中间坐标系的变换都写出来:
i
P
T
=
[
1
0
0
0
0
1
0
0
0
0
1
d
i
0
0
0
1
]
P
Q
T
=
[
cos
θ
1
−
sin
θ
1
0
0
sin
θ
1
cos
θ
1
0
0
0
0
1
0
0
0
0
1
]
Q
R
T
=
[
1
0
0
0
0
1
0
a
i
−
1
0
0
1
0
0
0
0
1
]
R
i
−
1
T
=
[
1
0
0
0
0
cos
α
i
−
1
−
sin
α
i
−
1
0
0
sin
α
i
−
1
cos
α
i
−
1
0
0
0
0
1
]
^P_iT = \begin{bmatrix} 1 & 0 & 0 & 0 \\ 0 & 1 & 0 & 0 \\ 0 & 0 & 1 & d_i \\ 0 & 0 & 0 & 1 \\ \end{bmatrix} \\ \quad \\ \ ^Q_PT = \begin{bmatrix} \cos \theta_1 & -\sin \theta_1 & 0 & 0 \\ \sin \theta_1 & \cos \theta_1 & 0 & 0 \\ 0 & 0 & 1 &0 \\ 0 & 0 & 0 & 1 \\ \end{bmatrix} \\ \quad \\ \ ^R_QT = \begin{bmatrix} 1 & 0 & 0 & 0 \\ 0 & 1 & 0 & a_{i-1} \\ 0 & 0 & 1 & 0 \\ 0 & 0 & 0 & 1 \\ \end{bmatrix} \\ \quad \\ \ ^{i-1}_RT = \begin{bmatrix} 1 & 0 & 0 & 0 \\ 0 & \cos \alpha_{i-1} & -\sin \alpha_{i-1} & 0 \\ 0 & \sin \alpha_{i-1} & \cos \alpha_{i-1} & 0 \\ 0 & 0 & 0 & 1 \\ \end{bmatrix} \\ \quad \\
iPT=⎣⎢⎢⎡10000100001000di1⎦⎥⎥⎤ PQT=⎣⎢⎢⎡cosθ1sinθ100−sinθ1cosθ10000100001⎦⎥⎥⎤ QRT=⎣⎢⎢⎡1000010000100ai−101⎦⎥⎥⎤ Ri−1T=⎣⎢⎢⎡10000cosαi−1sinαi−100−sinαi−1cosαi−100001⎦⎥⎥⎤ 得到
i
i
−
1
T
^{i-1}_iT
ii−1T的一般形式:
上图中,考虑坐标系
{
i
−
1
}
,
{
i
}
\{i-1\},\{i\}
{i−1},{i}之间的变换
i
−
1
i
T
^i_{i-1}T
i−1iT,建立中间坐标系
{
P
}
,
{
Q
}
,
{
R
}
\{P\},\{Q\},\{R\}
{P},{Q},{R},则有:
i
i
−
1
T
=
R
i
−
1
T
Q
R
T
P
Q
T
i
P
T
^{i-1}_iT = \ ^{i-1}_RT \ ^R_{Q}T \ ^Q_PT \ ^P_{i}T
ii−1T= Ri−1T QRT PQT iPT 上面的变换,可以看作是把
X
^
i
\hat X_i
X^i变换为
X
^
i
−
1
\hat X_{i-1}
X^i−1,则有:
i
i
−
1
T
=
R
X
(
α
i
−
1
)
D
X
(
a
i
−
1
)
R
Z
(
θ
i
)
D
Z
(
d
i
)
^{i-1}_iT = R_X(\alpha_{i-1})D_X(a_{i-1})R_Z(\theta_i)D_Z(d_i)
ii−1T=RX(αi−1)DX(ai−1)RZ(θi)DZ(di) 或者将每个中间坐标系的变换都写出来:
i
P
T
=
[
1
0
0
0
0
1
0
0
0
0
1
d
i
0
0
0
1
]
P
Q
T
=
[
cos
θ
1
−
sin
θ
1
0
0
sin
θ
1
cos
θ
1
0
0
0
0
1
0
0
0
0
1
]
Q
R
T
=
[
1
0
0
0
0
1
0
a
i
−
1
0
0
1
0
0
0
0
1
]
R
i
−
1
T
=
[
1
0
0
0
0
cos
α
i
−
1
−
sin
α
i
−
1
0
0
sin
α
i
−
1
cos
α
i
−
1
0
0
0
0
1
]
^P_iT = \begin{bmatrix} 1 & 0 & 0 & 0 \\ 0 & 1 & 0 & 0 \\ 0 & 0 & 1 & d_i \\ 0 & 0 & 0 & 1 \\ \end{bmatrix} \\ \quad \\ \ ^Q_PT = \begin{bmatrix} \cos \theta_1 & -\sin \theta_1 & 0 & 0 \\ \sin \theta_1 & \cos \theta_1 & 0 & 0 \\ 0 & 0 & 1 &0 \\ 0 & 0 & 0 & 1 \\ \end{bmatrix} \\ \quad \\ \ ^R_QT = \begin{bmatrix} 1 & 0 & 0 & 0 \\ 0 & 1 & 0 & a_{i-1} \\ 0 & 0 & 1 & 0 \\ 0 & 0 & 0 & 1 \\ \end{bmatrix} \\ \quad \\ \ ^{i-1}_RT = \begin{bmatrix} 1 & 0 & 0 & 0 \\ 0 & \cos \alpha_{i-1} & -\sin \alpha_{i-1} & 0 \\ 0 & \sin \alpha_{i-1} & \cos \alpha_{i-1} & 0 \\ 0 & 0 & 0 & 1 \\ \end{bmatrix} \\ \quad \\
iPT=⎣⎢⎢⎡10000100001000di1⎦⎥⎥⎤ PQT=⎣⎢⎢⎡cosθ1sinθ100−sinθ1cosθ10000100001⎦⎥⎥⎤ QRT=⎣⎢⎢⎡1000010000100ai−101⎦⎥⎥⎤ Ri−1T=⎣⎢⎢⎡10000cosαi−1sinαi−100−sinαi−1cosαi−100001⎦⎥⎥⎤ 得到
i
i
−
1
T
^{i-1}_iT
ii−1T的一般形式: 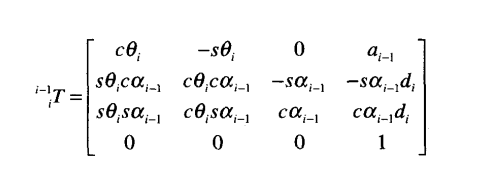
【本文地址】
今日新闻 |
推荐新闻 |