【精选】关于PSINS运动轨迹仿真模块的理解和思考 |
您所在的位置:网站首页 › 运动轨迹仿真难吗 › 【精选】关于PSINS运动轨迹仿真模块的理解和思考 |
【精选】关于PSINS运动轨迹仿真模块的理解和思考
|
文章目录
坐标系定义飞行轨迹设计1. 飞行轨迹类型2. 相关代码(1) test_SINS_trj.m(2) trjsegement.m(3) trjsimu.m
疑问与思考
本篇博客主要是对严恭敏老师PSINS工具箱中的轨迹仿真模块的一些阅读、理解和思考,同时也包含了一些疑问。运动轨迹仿真模块主要是输出载体的位置、姿态、速度,以及仿真生成惯性传感器信息的模块。一般做导航算法仿真验证的时候,都需要利用该模块生成传感器信息,验证算法的正确性和有效性。 坐标系定义在PSINS中部分定义如下: 载体坐标系(b): 右前上(RFU)地理坐标系(导航系n):东北天(ENU)姿态/欧拉角向量: att=[俯仰pitch;横滚roll;方位yaw],俯仰角范围-pi2 ~ pi/2,机头朝上为正;横滚范围-pi ~ pi,右倾为正;方位角范围-pi ~ pi,注意北偏西为正 飞行轨迹设计 1. 飞行轨迹类型参考严恭敏老师《捷联惯导算法与组合导航原理》的第8章或者readme.doc的第10.8节可知,PSINS轨迹仿真中包含的运动类型有:
在demo/test_SINS_trj.m是一个轨迹仿真的例子。 (1) test_SINS_trj.m 在该文件中调用trjsegement函数对航迹进行了分段仿真调用trjsimu函数生成姿态、速度、位置以及惯性器件信息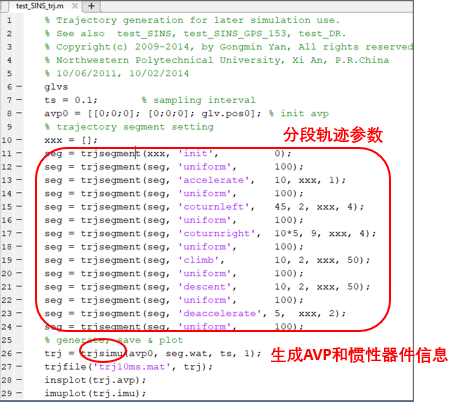 (2) trjsegement.m
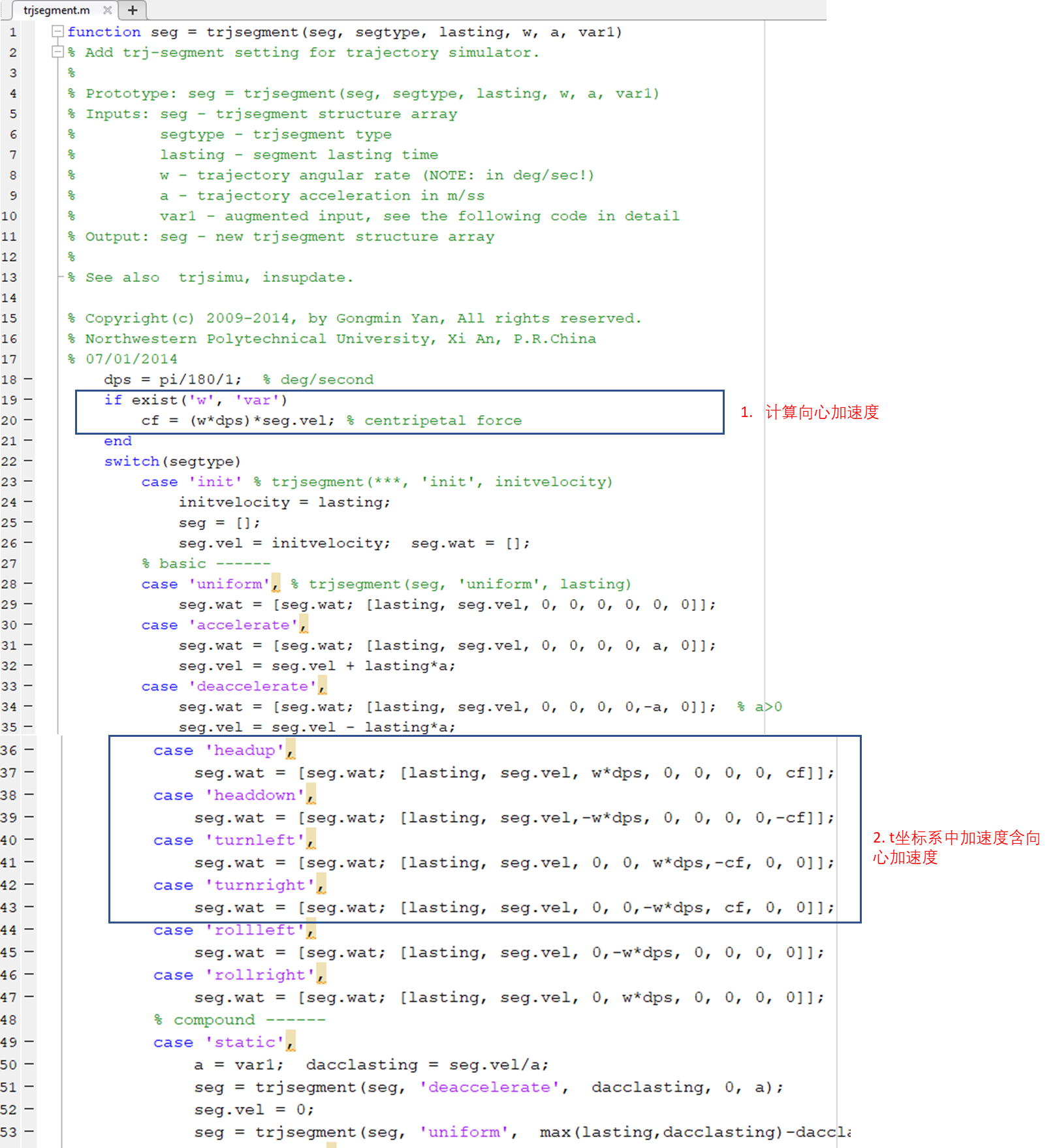
(2) trjsegement.m
该文件根据输出的航迹类型,持续时间,前向加速度,姿态变化率生成seg.wat。其中seg.wat中包含持续时间、机头前向速度、姿态变化率以及“t frame”中的加速度。 对于向心加速度这部分的计算,以及后面推算导航系下的加速度,我不太确定PSINS这部分计算的正确性,而且我感觉不引入t frame对我来说更容易理解,具体会在后面的思考中解释。 手册中对t frame相关的描述如下:
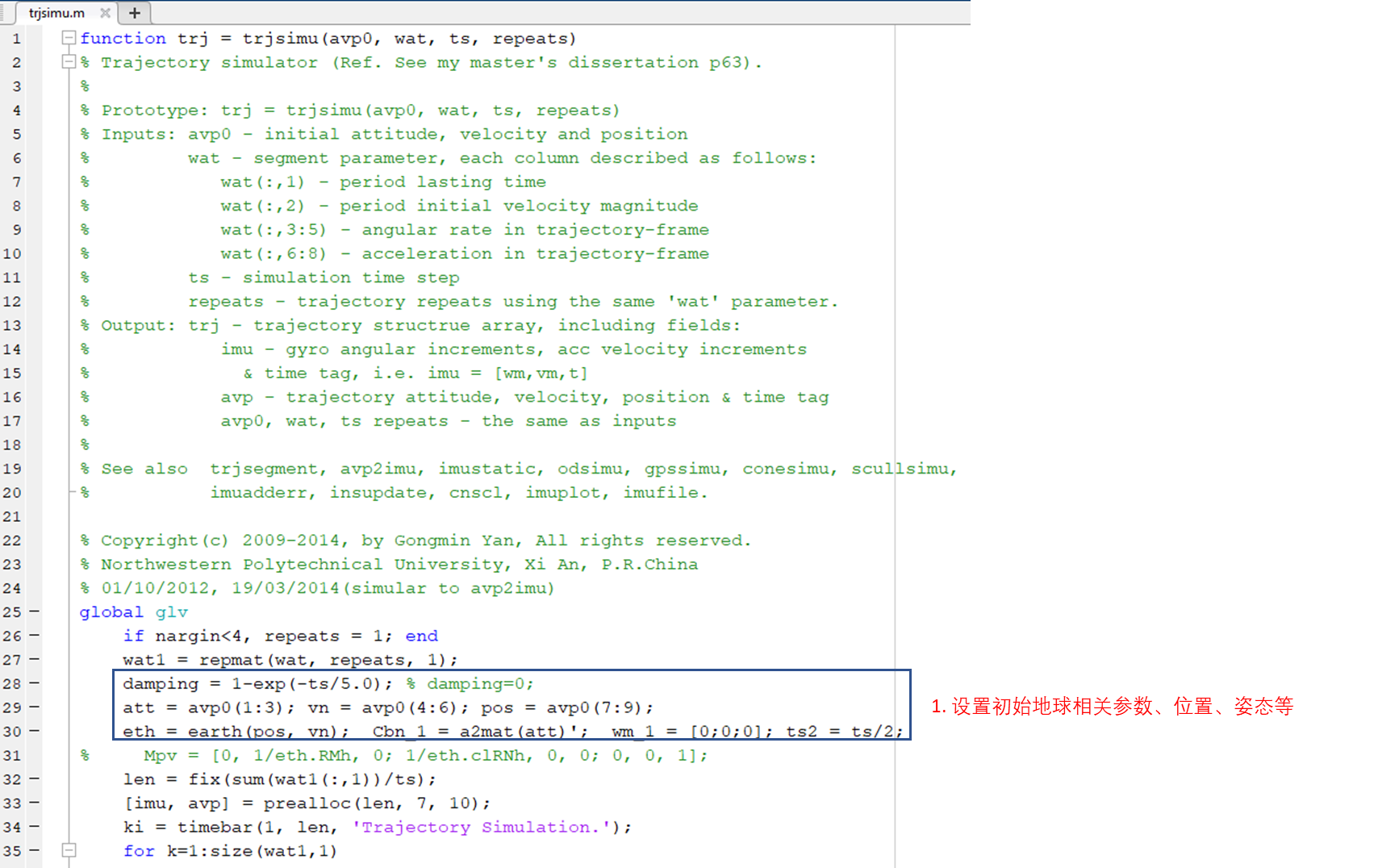
相关代码如下:
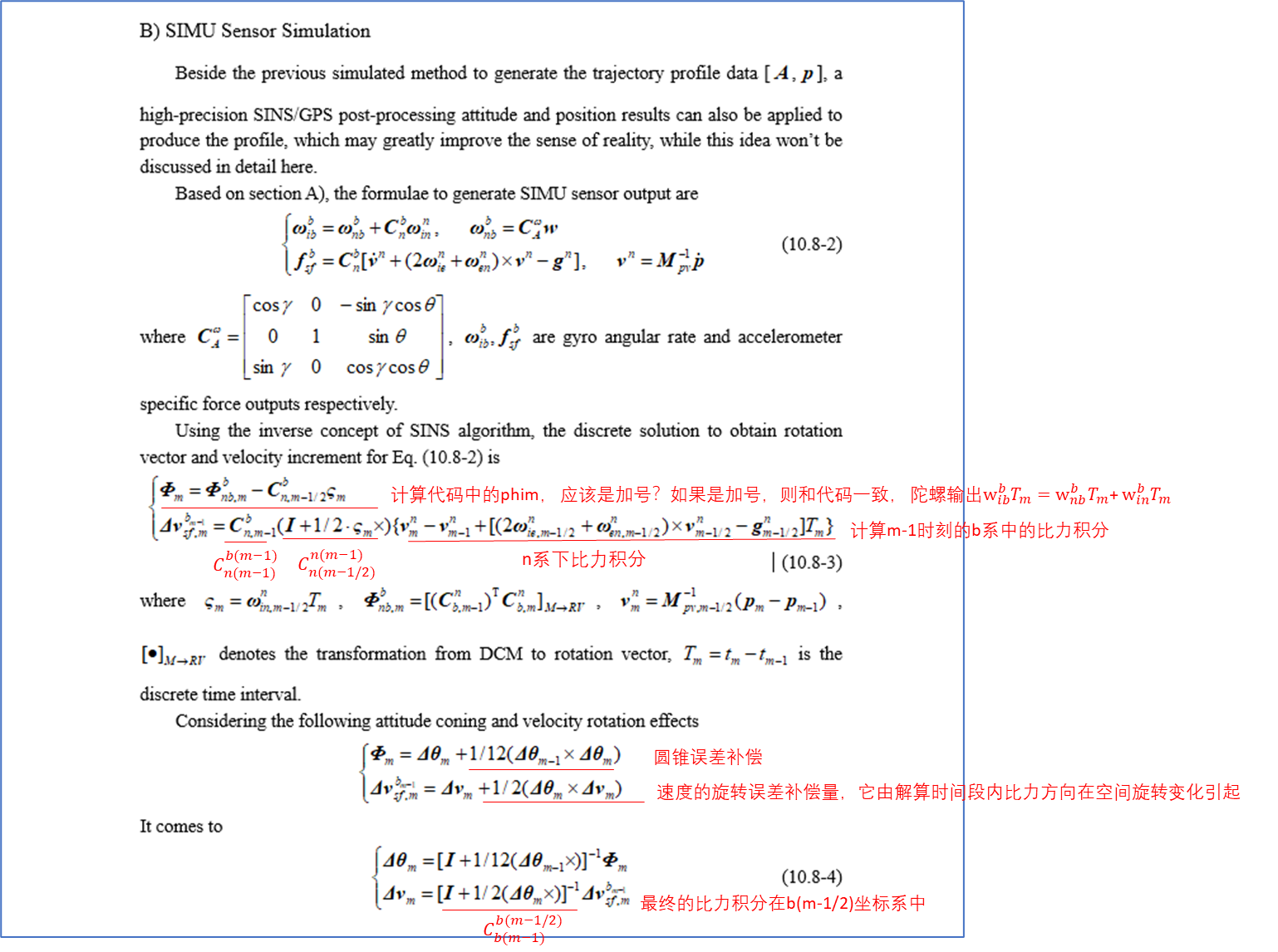
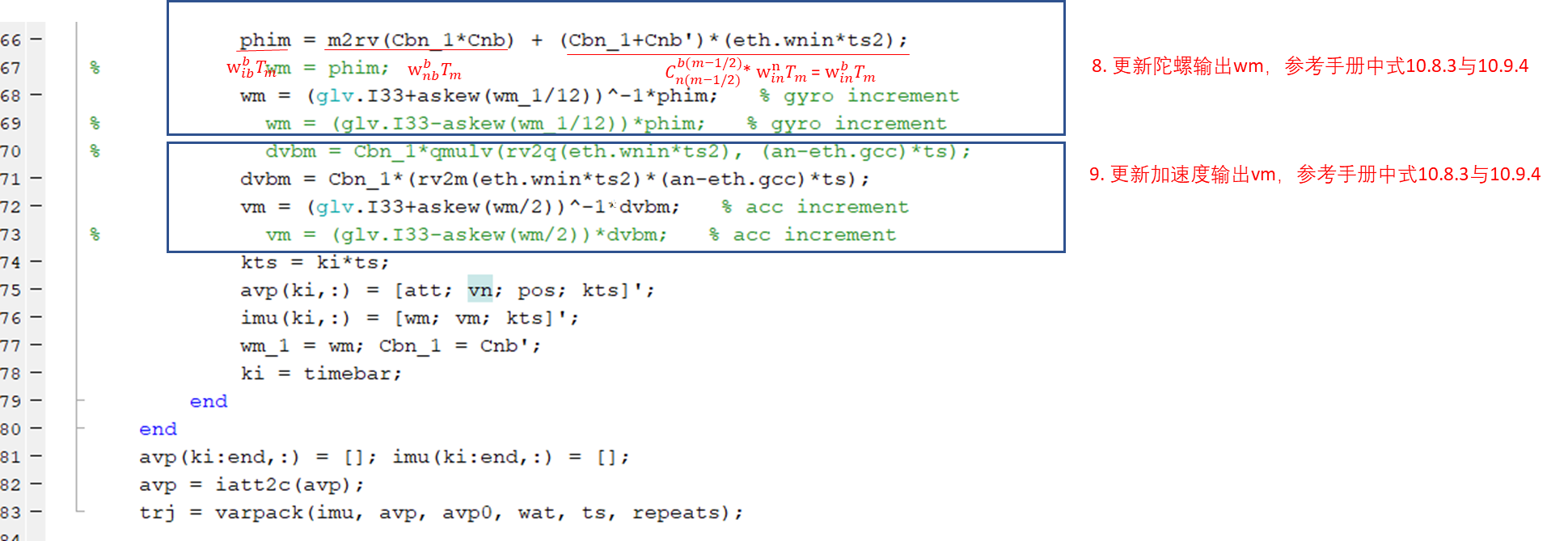
手册中包含了计算惯性器件信息(陀螺仪输出、加速度计输出)的公式,对照公式看代码会比较容易理解。 手册中的相关描述: 相关代码:
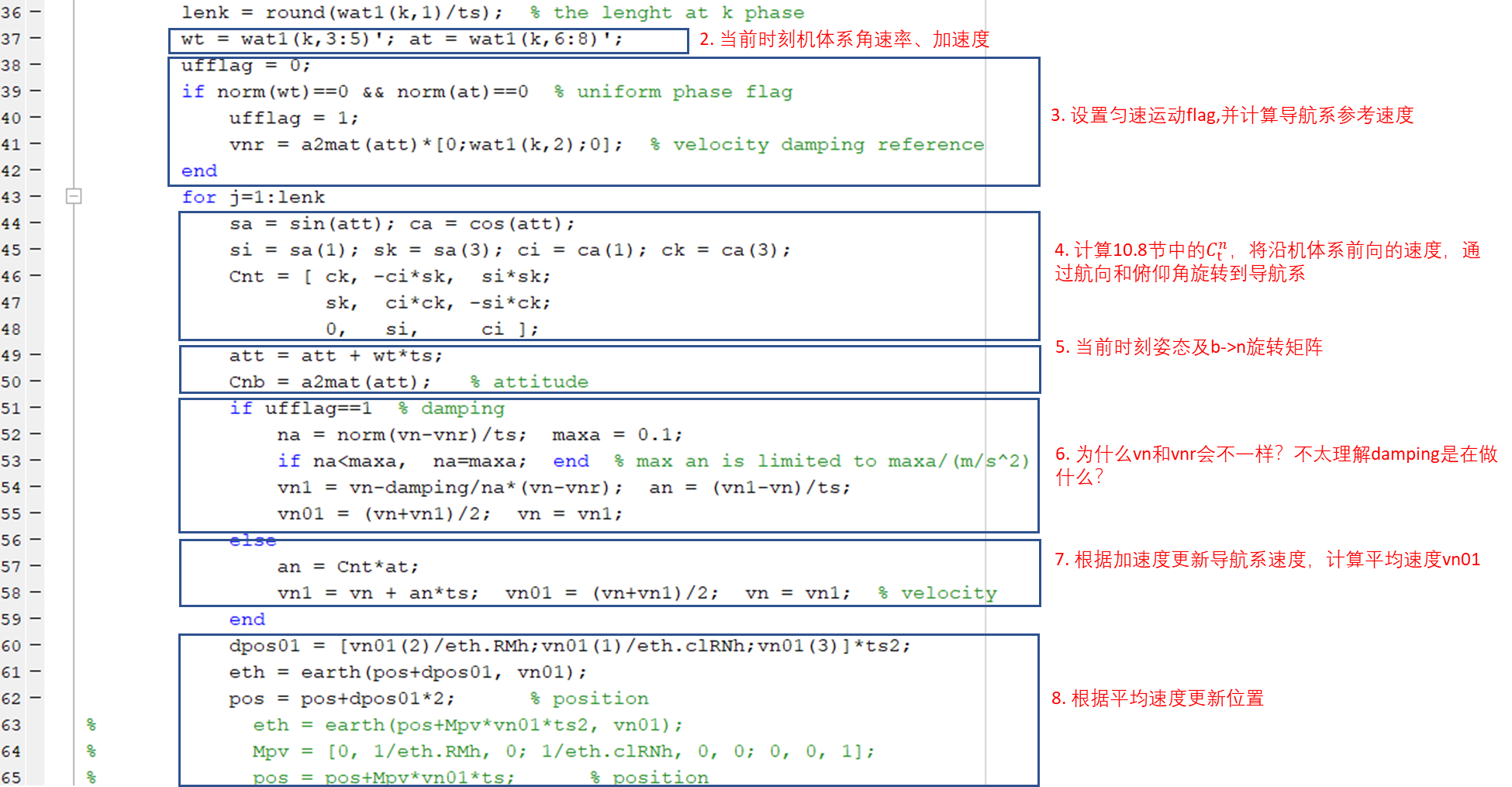
我主要不太明白的地方有两个: damping是在做什么?计算导航系加速度an = Cnt*at (注释第7条)的方法是否正确?-------------2022.11.08更新----------------------- 对于疑问1,最近对damping有一些理解,所以进行了疑问1的更新。 考虑一种情况: t-1时刻加速:wat1中 w(t-1)=0, a(t-1)=1m/s^2, v(t-1)=0t时刻减速:wat1中 w(t)=0, a(t)=-1m/s^2, v(t)=1*dt m/s;t+1时刻匀速:wat1中 w(t+1)=0, a(t+1)=0, v(t+1)=0;按照代码51-59行的计算方式,t+1时刻,如果damping=0,那么当前时刻等上一时刻的速度vn1=vn=1*dt m/s, an=0。但是显然实际上t+1时刻我们希望的是速度为0,没有damping继续减速就做不到让速度为0。damping实质是在匀速段,在上一时刻的速度基础上,让它逐步加速或者减速到我们期望的匀速速度。 ---------------原内容------------------------- 对于疑问2,我认为比较正确的方法是: 首先计算欧拉旋转矩阵,然后计算Wnbb — 机体相对导航系的角速率在机体系下的投影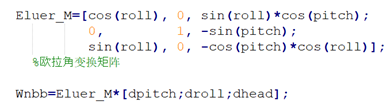 叉乘计算向心力,并计算地理系加速度acceN (acceB只有机头方向有加速度,其他两个方向为0) 叉乘计算向心力,并计算地理系加速度acceN (acceB只有机头方向有加速度,其他两个方向为0) 
由于b系和t系y轴重合(机头前向),而且对于机体而言,只有前向有速度,因此PSINS中的算法则相当于: |


 用matlab计算试了试,在姿态角都不为0,且机体有速度,并且航向变化率不为0的情况下,这两种方法给出的结果是不太一致的。我没有做详细的公式推导,但是从计算结果来看,两种计算方法应该是不等价的。
用matlab计算试了试,在姿态角都不为0,且机体有速度,并且航向变化率不为0的情况下,这两种方法给出的结果是不太一致的。我没有做详细的公式推导,但是从计算结果来看,两种计算方法应该是不等价的。【本文地址】