深入理解NMPC非线性模型预测控制及其应用:原理、代码实现与案例分析 |
您所在的位置:网站首页 › 轨迹线性化控制方案 › 深入理解NMPC非线性模型预测控制及其应用:原理、代码实现与案例分析 |
深入理解NMPC非线性模型预测控制及其应用:原理、代码实现与案例分析
|
NMPC非线性模型预测控制从原理与代码实现 NMPC非线性模型预测控制详细原理推导 平行泊车轨迹规划 倒立摆Swing up控制 车辆运动学模型轨迹跟踪 四旋翼无人机轨迹跟踪 包含上述所有的文档和代码。 ID:5817713118784910 就借着月光 NMPC非线性模型预测控制从原理与代码实现 非线性模型预测控制(Nonlinear Model Predictive Control,NMPC)作为一种先进的控制方法,已经在自动驾驶、机器人控制、工业过程控制等领域得到了广泛的应用和研究。本文将从原理与代码实现两个方面详细介绍NMPC的工作原理和实践中的代码实现。 在研究NMPC的工作原理之前,我们先来简单了解一下NMPC的基本思想。NMPC是一种基于模型的控制方法,其核心思想是通过建立系统的数学模型,并利用该模型对未来一段时间内的系统行为进行预测,然后根据预测结果进行优化求解,得到最优的控制策略。与传统的PID控制方法相比,NMPC具有更强的非线性建模能力和更好的控制性能。 首先我们来详细推导NMPC的工作原理。NMPC的基本框架由预测模型、性能指标和优化求解器三部分组成。首先,我们需要建立系统的动态模型,通常采用非线性方程组描述系统的动力学行为。然后,我们需要选择合适的性能指标,用于评估当前控制策略的优劣。常用的性能指标包括系统的轨迹跟踪误差和控制输入的平滑性等。最后,我们需要设计一个优化求解器,通过求解一个优化问题来得到最佳的控制策略。 接下来我们将以平行泊车轨迹规划为例,详细介绍NMPC的实际应用。平行泊车是一种常见的驾驶场景,对驾驶员的操作技巧要求较高。为了提高泊车的安全性和准确性,我们可以采用NMPC进行自动泊车控制。在这个例子中,我们需要建立车辆的动力学模型,并选择合适的性能指标。动力学模型可以通过车辆的运动学方程来描述,性能指标可以选择轨迹跟踪误差和控制输入的平滑性等。然后,我们可以通过求解一个优化问题来得到最优的控制策略,以实现自动泊车的功能。 除了平行泊车之外,NMPC还可以应用在其他的控制问题上,如倒立摆控制、四旋翼无人机控制等。倒立摆控制是一种经典的非线性控制问题,通过倒立摆控制的研究可以加深我们对NMPC的理解。类似地,四旋翼无人机控制也是一个典型的非线性控制问题,NMPC可以实现对无人机飞行轨迹的精确跟踪。 在实际应用中,NMPC的代码实现是一个关键的环节。在编写代码时,我们需要考虑到NMPC的求解速度和控制性能之间的平衡。通常情况下,NMPC的求解过程是一个高度非线性的优化问题,需要耗费较多的计算资源。因此,在实际应用中,我们需要采用一些优化技巧来提高代码的求解效率,如使用快速非线性优化算法、合理选择优化问题的参数等。 综上所述,NMPC作为一种先进的控制方法,具有很高的应用价值和研究意义。本文对NMPC的工作原理和代码实现进行了详细的介绍,并以平行泊车轨迹规划为例,展示了NMPC在实际应用中的效果。希望本文对读者能够有所启发,对NMPC的理解和应用有一定的帮助。最后,希望读者能够在实践中进一步探索和应用NMPC,为控制领域的发展做出贡献。 附:本文所提到的所有文档和代码已经整理完备,可供读者参考和使用。 以上相关代码,程序地址:http://wekup.cn/713118784910.html |
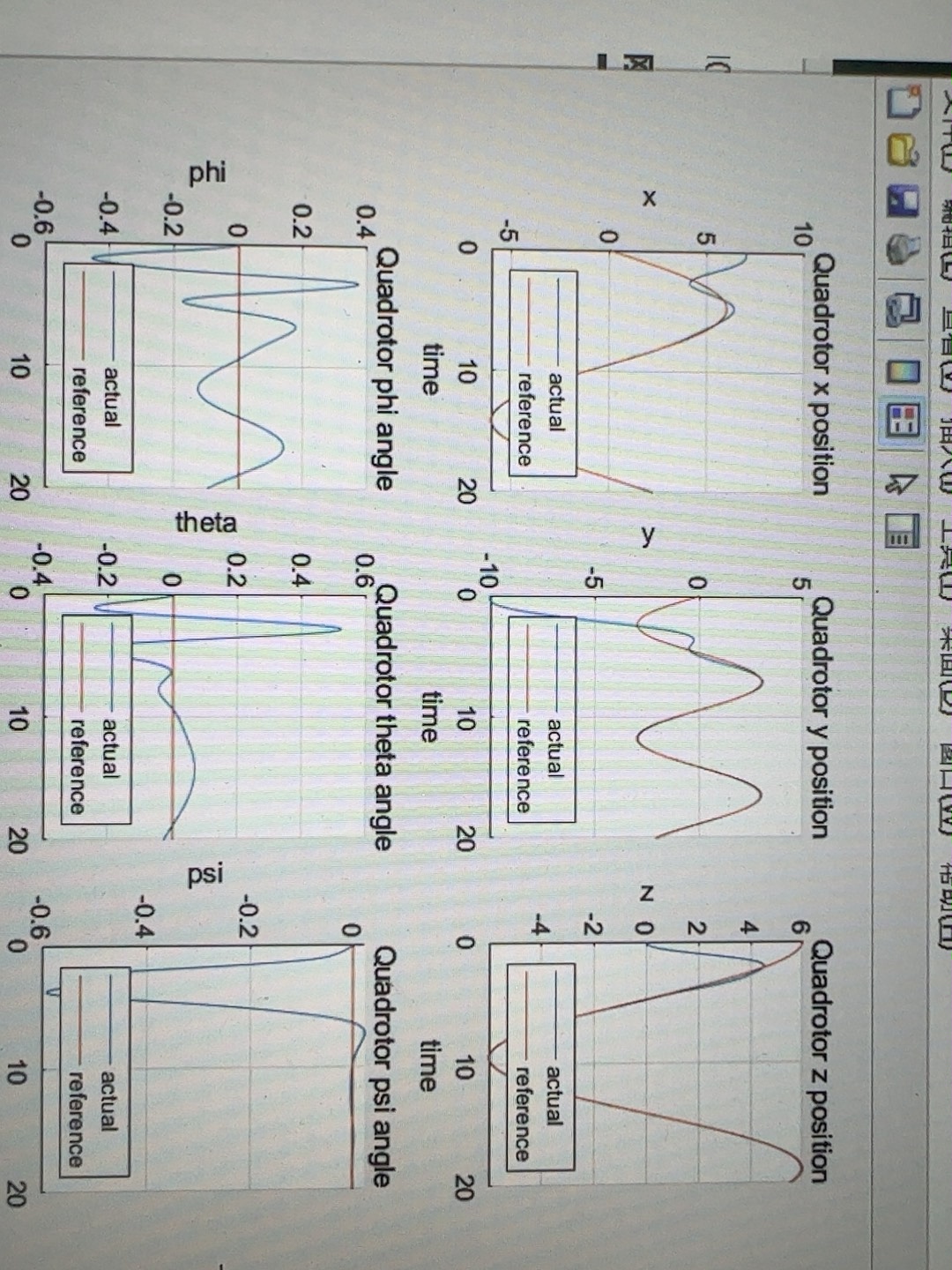

【本文地址】
今日新闻 |
推荐新闻 |