L1,L2,Lp,L∞范数,曼哈顿距离,欧式距离,切比雪夫距离,闵可夫斯基距离以及损失函数和正则项的应用 |
您所在的位置:网站首页 › 距离的意思是什么意思 › L1,L2,Lp,L∞范数,曼哈顿距离,欧式距离,切比雪夫距离,闵可夫斯基距离以及损失函数和正则项的应用 |
L1,L2,Lp,L∞范数,曼哈顿距离,欧式距离,切比雪夫距离,闵可夫斯基距离以及损失函数和正则项的应用
|
什么是范数?
在线性代数以及一些数学领域中,norm 的定义是 a function that assigns a strictly positive length or size to each vector in a vector space, except for the zero vector. ——Wikipedia 简单点说,一个向量的 norm 就是将该向量投影到 [0, ) 范围内的值,其中 0 值只有零向量的 norm 取到。看到这样的一个范围,相信大家就能想到其与现实中距离的类比,于是在机器学习中 norm 也就总被拿来表示距离关系:根据怎样怎样的范数,这两个向量有多远。 上面这个怎样怎样也就是范数种类,通常我们称为p-norm,严格定义是: ∣ ∣ x ∣ ∣ p : = ( ∑ i = 1 n ∣ x i ∣ p ) 1 p ||x||_p := (\sum^n_{i=1}|x_i|^p)^\frac{1}{p} ∣∣x∣∣p:=(i=1∑n∣xi∣p)p1 其中当 p 取 1 时被称为 1-norm,也就是提到的 L1-norm,同理 L2-norm 可得。 L1 , L2 ,L∞范数的定义根据上述公式 L1-norm 和 L2-norm 的定义也就自然而然得到了。 先将 p=1 代入公式,就有了 L1-norm 的定义: ∣ ∣ x ∣ ∣ 1 : = ∑ i = 1 n ∣ x i ∣ ||x||_1 :=\sum^n_{i=1}|x_i| ∣∣x∣∣1:=i=1∑n∣xi∣ 然后代入 p=2,L2-norm 也有了: ∣ ∣ x ∣ ∣ 1 : = ( ∑ i = 1 n ∣ x i ∣ 2 ) 1 2 ||x||_1 :=(\sum^n_{i=1}|x_i|^2)^{\frac{1}{2}} ∣∣x∣∣1:=(i=1∑n∣xi∣2)21 L2 展开就是熟悉的欧几里得范数: ∣ ∣ x ∣ ∣ 2 : = x 1 2 + ⋅ ⋅ ⋅ + x n 2 ||x||_2 :=\sqrt{x_1^2+\cdot\cdot\cdot + x_n^2} ∣∣x∣∣2:=x12+⋅⋅⋅+xn2 无穷范数,向量中最大元素的绝对值 ∣ ∣ x ∣ ∣ ∞ = m a x ( ∣ x 1 ∣ , ∣ x 2 ∣ , . . . , ∣ x n ∣ ) ||x||_∞ = max(|x_1|,|x_2|,...,|x_n|) ∣∣x∣∣∞=max(∣x1∣,∣x2∣,...,∣xn∣) 题外话,其中 L1-norm 又叫做 taxicab-norm 或者 Manhattan-norm,可能最早提出的大神直接用在曼哈顿区坐出租车来做比喻吧。下图中绿线是两个黑点的 L2 距离,而其他几根就是 taxicab 也就是 L1 距离,确实很像我们平时用地图时走的路线了。 
L1 和 L2 范数在机器学习上最主要的应用大概分下面两类: 作为损失函数使用 作为正则项使用也即所谓 L1-regularization 和 L2-regularization 在说这个之前,我们先来说几个距离概念吧。 距离概念对于一些常见的距离先做一个简单的说明 假设X和Y都是一个n维的向量,即 X = ( x 1 , x 2 , x 3 , . . . , x n ) , Y = ( y 1 , y 2 , y 3 , . . . y n ) X = (x_1,x_2,x_3,...,x_n) , Y=(y_1,y_2,y_3,...y_n) X=(x1,x2,x3,...,xn),Y=(y1,y2,y3,...yn) 曼哈顿距离来源于美国纽约市曼哈顿区,因为曼哈顿是方方正正的。对应L1范数。 D ( X , Y ) = ∑ i = 1 n ∣ x i − y i ∣ D(X,Y) = \sum^n_{i=1}|x_i-y_i| D(X,Y)=i=1∑n∣xi−yi∣ 欧式距离对应L2范数 D ( X , Y ) = ∑ i = 1 n ( x i − y i ) 2 D(X,Y) = \sqrt{\sum^n_{i=1}(x_i-y_i)^2} D(X,Y)=i=1∑n(xi−yi)2 切比雪夫距离切比雪夫距离是将2个点之间的距离定义为其各坐标数值差的最大值。对应L∞范数 D ( X , Y ) = m a x ( ∣ x 1 − y 1 ∣ , ∣ x 2 − y 2 ∣ , . . . , ∣ x n − y n ∣ ) D(X,Y) = max(|x_1-y_1|,|x_2-y_2|,...,|x_n-y_n|) D(X,Y)=max(∣x1−y1∣,∣x2−y2∣,...,∣xn−yn∣) 闵可夫斯基距离对应Lp范数 D ( X , Y ) = ( ∑ i = 1 n ∣ x i − y i ∣ p ) 1 p D(X,Y) = (\sum^n_{i=1}|x_i-y_i|^p)^{\frac{1}{p}} D(X,Y)=(i=1∑n∣xi−yi∣p)p1 这里的p值是一个变量: 当p=1的时候就得到了曼哈顿距离当p=2的时候就得到了欧氏距离当p=∞的时候就得到了切比雪夫距离 担当损失函数先来看个回归问题 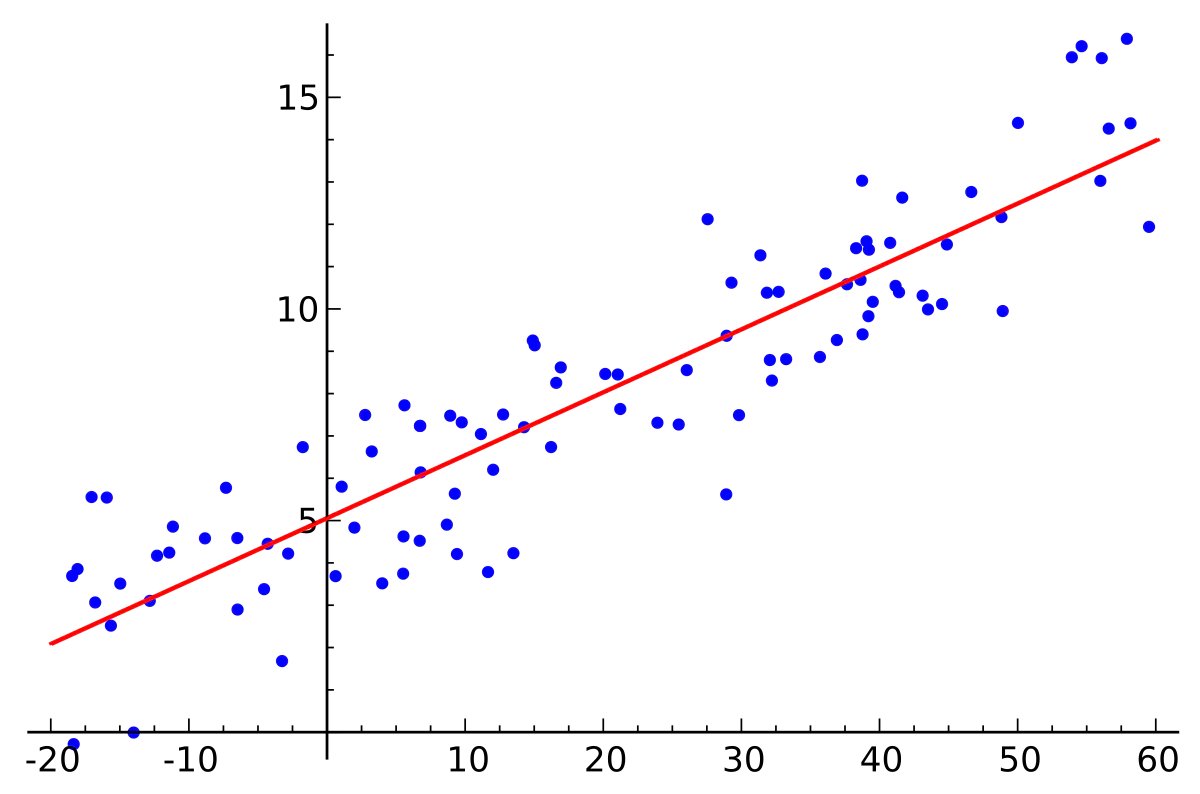
我们需要做的是,获得一条线,让数据点到线上的总距离(也就是error)最小。 还记得之前在范数介绍中提到的用来表示距离吗,于是也可以用能表示距离的 L1-norm 和 L2-norm 来作为损失函数了。 首先是 L1-norm 损失函数,又被称为最小绝对偏差 (least absolute deviation,LAD) S = ∑ i = 1 n = ∣ y i − f ( x i ) ∣ S = \sum^n_{i=1} = |y_i - f(x_i)| S=i=1∑n=∣yi−f(xi)∣ 如果我们最小化上面的损失函数,其实就是在最小化预测值 和目标值 的绝对值。 之后是大家最熟悉的 L2-norm 损失函数,又有大名最小二乘误差 (least squares error, LSE): S = ∑ i = 1 n ( y i − f ( x i ) ) 2 S = \sum^n_{i=1}(y_i - f(x_i))^2 S=i=1∑n(yi−f(xi))2 那么问题来了,为什么大家一般都用 L2 损失函数,却不用 L1 呢? 这个就说来话长了,如果你问一个学习过微积分的同学,如何求一个方程的最小值,他/她大概会想当然的说:“求导,置零,解方程。” 号称微积分届的农夫三拳。 但如果给出一个绝对值的方程,突然就会发现农夫三拳不管用了,求最小值就有点麻烦了。主要是因为绝对值的倒数是不连续的。 同样的对于 L1 和 L2 损失函数的选择,也会碰到同样的问题,所以最后大家一般用 L2 损失函数而不用 L1 损失函数的原因就是: 因为计算方便!可以直接求导获得取最小值时各个参数的取值。 此外还有一点,用 L2 一定只有一条最好的预测线,L1 则因为其性质可能存在多个最优解。 当然 L1 损失函数难道就没有什么好处了吗,也是有的,那就是鲁棒性 (Robust) 更强,对异常值更不敏感。 L1范数与L2范数作为损失函数的区别能快速地总结如下: L2损失函数L1损失函数不是非常的鲁棒(robust)鲁棒计算方便计算较复杂稳定解不稳定解总是一个解可能多个解 担当正则项因为机器学习中众所周知的过拟合问题,所以用正则化防止过拟合,成了机器学习中一个非常重要的技巧。正则化通过降低模型的复杂性, 缓解过拟合。 但数学上来讲,其实就是在损失函数中加个正则项(Regularization Term),来防止参数拟合得过好。 L1-regularization 和 L2-regularization 便都是我们常用的正则项,两者公式的例子分别如下 
这两个正则项最主要的不同,包括两点: 如上面提到的,L2 计算起来更方便,而 L1 在特别是非稀疏向量上的计算效率就很低;还有就是 L1 最重要的一个特点,输出稀疏,会把不重要的特征直接置零,而 L2 则不会;最后,如之前多次提过,L2 有唯一解,而 L1 不是。这里关于第二条输出稀疏我想再进行一些详细讲解,因为 L1 天然的输出稀疏性,把不重要的特征都置为 0,所以它也是一个天然的特征选择器。 可是为什么 L1 会有这样的性质呢,而 L2 没有呢?这里用个直观的例子来讲解。 来一步一步看吧,首先获知用梯度下降法来优化时,需要求导获得梯度,然后用以更新参数。 w = w − α ∂ L ( w ) ∂ w w = w - α\frac{\partial L(w)}{\partial w} w=w−α∂w∂L(w) 于是分别先对 L1 正则项和 L2 正则项来进行求导,可得: 
之后将 L1 和 L2 和它们的导数画在图上  于是会发现,在梯度更新时,不管 L1 的大小是多少(只要不是0)梯度都是1或者-1,所以每次更新时,它都是稳步向0前进。
于是会发现,在梯度更新时,不管 L1 的大小是多少(只要不是0)梯度都是1或者-1,所以每次更新时,它都是稳步向0前进。

而看 L2 的话,就会发现它的梯度当w越靠近0,就变得越小。  也就是说加了 L1 正则的话基本上经过一定步数后很可能变为0,而 L2 几乎不可能,因为在值小的时候其梯度也会变小。于是也就造成了 L1 输出稀疏的特性。
也就是说加了 L1 正则的话基本上经过一定步数后很可能变为0,而 L2 几乎不可能,因为在值小的时候其梯度也会变小。于是也就造成了 L1 输出稀疏的特性。
|
【本文地址】
今日新闻 |
推荐新闻 |