伺服增益参数简述及其调整 |
您所在的位置:网站首页 › 超同步伺服电机振动调节什么参数 › 伺服增益参数简述及其调整 |
伺服增益参数简述及其调整
|
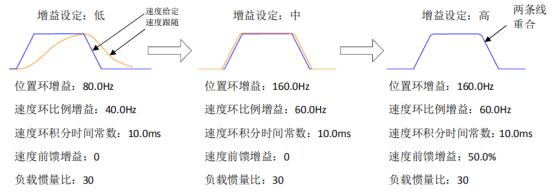
参考文献 [1] 颜嘉男. 伺服电机应用技术[M]. 第1版. 北京:科学出版社, 2010. [2] 台达. ASDA-B2伺服手册[EB/OL]. [3] 陈国强, Putra A S. 工业自动化中的驱动与控制[M]. 第1版. 北京:机械工业出版社, 2016 :86-105. [4] 汇川技术. IS620F系列伺服用户手册[EB/OL]. 相关内容回顾: 伺服电机基本概念解析:伺服系统组成及其控制原理 伺服驱动器的接线与基本控制 1概述按照设备需求选择好合适的控制模式后,需要对伺服增益参数进行合理的调整,使得伺服驱动器能快速、准确的驱动电机,最大限度发挥机械性能。 以下采用位置伺服为例,说明驱动器的基本原理及各项必要的调整参数,因为位置伺服驱动器具备完整的驱动器元件。位置伺服驱动器内部包含:位置环、速度环、电流环。伺服驱动器的设计可尽量确保电流环具备良好的反应性能,故用户只需调整位置环、速度环的增益即可。伺服增益通过多个参数进行调整,它们之间会相互影响。 速度环常使用PI控制器,调整Kvp,Kvi值,可使得伺服系统的速度控制性能符合要求。 PID相关知识点可参考:智能车PID控制学习笔记 速度比例增益(KVP) 本参数决定速度控制回路的应答性,KVP 设越大速度回路响应频率越高,对于速度命令的追随性越佳,但是过大的设定容易引发机械共振。 速度回路的响应频率必须比位置回路的响应频率高 4~6 倍,当位置响应频率比速度响应频率高时,机台会产生抖动或定位会有过冲(Overshoot)的现象。 速度积分时间(KVI) KVI 越大对固定偏差消除能力越佳,过大的设定容易引发机台的抖动。 增益和时间的问题 P、I、D常以增益的方式表示,数值越大其所造成的效果越大,这是为方便说明并且容易标识所用的方法;实际上积分I常用时间常量而非增益常量,两者为反比关系,因此要增加积分控制的效果,必须将时间常量减少。 2.2位置控制单元参数伺服电机驱动必须设置位置增益参数Kpp,由于伺服驱动器位置控制单元采用P控制器,所以又称为位置比例增益参数。调整位置比例增益参数又称为伺服电机刚性调整,Kpp参数设置越大,控制反应越迅速,称为刚性较硬,反之则称为刚性较软。 位置比例增益(KPP) KPP 值设定越大,位置回路响应频率越高,对于位置命令的追随性越佳,位置误差量越小,定位整定时间越短,但是过大的设定会造成机台产生抖动或定位会有过冲(Overshoot)的现象,最终导致系统振荡而无法使用。Kpp值的调整,实际上是介于快速与稳定性之间的取舍,系统产生振荡,Kpp就必须往回调整,使系统进入稳定状态。 1.调整Kpp值时需考虑下列因素: 2.机构是否能接受较大的超调量; 3.较短的上升时间并不表示能缩短稳定时间; Kpp值减少时,上升时间延长,需要较长的时间才能到达设置点,最大超调量减少,但并不一定表示系统稳定时间将延长; 针对以上情况进行Kpp值的调整,求得的最短稳定时间即为最佳值,测量系统稳定时间需要适当的仪器,在无适当的仪器或工具进行辅助时,只能以人工进行调整及判断Kpp值是否适用。 位置前馈增益(PFG) 位置控制命令平滑变动时,增益值加大可改善位置跟随误差量。若位置控制命令不平滑变动时,降低增益值可降低机构的运转振动现象。 关于机构特性的影响 影响定位效率的另一重要因素为机构特性(又称阻尼特性)。在结构设计通常优先考虑功能及强度,因此机构特性通常很难或无法改变,故只能调整Kpp值配合机构特性。 机构设计不同时,机构特性必定不相同;即使结构相同,应用不同的安装方向也会产生不同的机构特性,进而产生不同的伺服系统参数。 3离线惯量辨识一些型号的伺服合并了离线惯量辨识和自动增益配置。即当执行自动增益调整时,系统将完成离线惯量辨识,并输出对应的刚性等级。 在进行自动增益配置前,必须确保获得正确的负载惯量比。 使用驱动器自身惯量辨识功能自动计算负载惯量比,无需上位机介入,即为离线惯量辨识。 加减速法是一种离线的辨识方法,其使伺服系统以一定的加速度进行加速、减速运行,同时检测伺服系统加速、减速时的转矩电流分量,根据伺服系统的运动方程计算得出伺服系统转动惯量。在实际的使用中,用户长按UP/DOWN使电机在一定范围内正反转,当面板显示值趋于稳定,该值即为辨识结果。 自动增益调整是指通过刚性等级选择功能,伺服驱动器将自动产生一组匹配的增益参数,满足快速性与稳定性需求。刚性等级相当于一个参数组,包含对速度比例增益、速度积分时间、位置前馈增益等参数的调整。下图为某型号伺服的刚性等级-参数表(刚性表)。 用户反复加减速,通过观察运行效果来对刚性等级进行调整。增加刚性等级来增加响应速度,或降低刚性等级来减少噪音,持续调整至性能满意,调机完成。 关于刚性等级的选择必须由机台的刚性及应用的场合来决定,一般而言,高频度定位的机台或要求精密加工的机台需要设定较高的刚性等级,但容易引发机台的共振,因此有高响应需求的场合需要刚性较高的机台以避免机械共振。在未知机台的容许响应频率时,可逐步加大刚性等级以提高响应频率直到共振音产生时,再调低刚性等级。 使用自动增益调整功能足以应付大多数负载条件。调整参数时,可以先使用自动参数调整功能,然后根据需要手动调整参数。通常由自动模式切换为手动模式时,相应的参数值也会更新成自动/半自动模式下相对应的参数值。 【学习笔记】伺服调试-增益调整 4手动增益的配置若自动增益调整无法满足需求,则用户可进行手动增益配置。速度环及电流环的参数调整是必须的,其他参数设置及选择项是否必要则随供应商不同而定。伺服增益通过多个参数的组合进行设定,它们之间互相影响,需要注意整体平衡,故当某值进行了较大的调整,往往其它参数值也需要进行修改。 因为位置回路的内回路包含速度回路,用户必须先将速度控制单元以手动操作方式设定完成。 第一步:调整速度比例增益Kvp值 将Kvi调整至零,然后将Kvp值渐渐加大,同时观察伺服电机旋转速度是否明显忽快忽慢,停止时是否产生振荡;当产生以上现象时,回调Kvp值,使振荡消除、旋转速度稳定。如有必要,经Kvi调整后,可再作反复修正以达到理想值。 第二步:调整速度积分增益Kvi值 将Kvi值渐渐加大直至积分效应产生,产生以上现象时,回调Kvi值,使振荡消除、旋转速度稳定。 建议按以下关系取值: 500 ≤ Kvp×Kvi ≤ 1000 第三步:调整位置比例增益Kpp值 调整方法见前文。 为保证系统稳定,应保证速度环最高跟随频率是位置环最高跟随频率的3~5 倍,即: 3 |
 增益调整的一般流程为: 惯量辨识->自动增益调整->手动增益调整(若自动增益调整不满足要求)->共振抑制(若手动增益调整不满足要求)
增益调整的一般流程为: 惯量辨识->自动增益调整->手动增益调整(若自动增益调整不满足要求)->共振抑制(若手动增益调整不满足要求)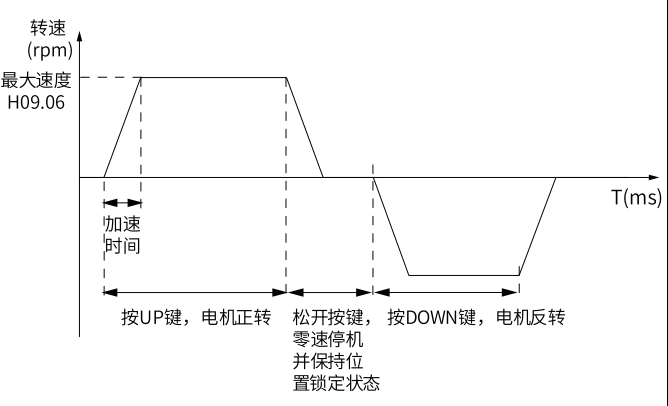
 刚性等级经验值 范围0-31,默认值12 0级~ 4级:极低的刚性,适合一些大型机械; 5级~ 11级:较低的刚性,一些较大惯量场合; 12级~15级:普通刚性,适合皮带传动、齿轮传动等场合; 16级~20级:较高的刚性,一般的轨迹控制、要求快速定位的场合刚性在这个范围; 21级及以上:极高的刚性,要求更高的轨迹控制和定位场合。
刚性等级经验值 范围0-31,默认值12 0级~ 4级:极低的刚性,适合一些大型机械; 5级~ 11级:较低的刚性,一些较大惯量场合; 12级~15级:普通刚性,适合皮带传动、齿轮传动等场合; 16级~20级:较高的刚性,一般的轨迹控制、要求快速定位的场合刚性在这个范围; 21级及以上:极高的刚性,要求更高的轨迹控制和定位场合。 
【本文地址】
今日新闻 |
推荐新闻 |