【控制仿真】flocking算法多智能蜂拥控制仿真【含Matlab源码 1955期】 |
您所在的位置:网站首页 › 航天器编队控制 › 【控制仿真】flocking算法多智能蜂拥控制仿真【含Matlab源码 1955期】 |
【控制仿真】flocking算法多智能蜂拥控制仿真【含Matlab源码 1955期】
|
⛄一、多智能体群集与避障算法研究简介
采用分散控制的策略, 将多智能体群体运动的总控制律分成三个子控制律, 即编队控制、避障控制、目标控制, 分别研究了多智能体运动中智能体之间位置和速度的协调、躲避障碍物和向目标点移动的控制, 如图1所示。 1 多智能体群集运动基本模型 根据图1所示的多智能体运动模型, 假设第i个α-智能体的控制律为μi, 则 2 多智能体群集控制与共识算法研究 考虑由N个α-智能体组成的智能群体, 其动态方程为: 当α-智能体群体根据该算法进行群集控制时, 需要判定该群体是否达成了共识。我们可以参考Reynolds提出的聚集行为基本规则, 获得智能体群体共识条件: (1) 根据邻接矩阵, 利用连通图检测网络连通情况, 若连通最大分量为M, 则需M=N; (2) 对于∀ (i, j) ∈I, ||pj (k) -pi (k) ||>δc, 其中δc为智能体之间的危险距离; (3) 对于∀ (i, j) ∈I (i≠j) close all clear; figure; global N R N=10; R=4; for i=1:N %赋始值 x(i)=rand10; y(i)=rand10; V(i)=rand4; W(i)=rand4; xd(i)=10; yd(i)=10; Vxd(i)=3; Vyd(i)=3; hold on plot(x(i),y(i),‘.’); end hold on plot(xd(i),yd(i),‘h’),xlabel(‘x’),ylabel(‘y’),title(‘初始状态’); for i=1:N hold on quiver(x,y,V,W,0.1); end for i=1:N for j=1:N d=sqrt((x(i)-x(j))2+(y(i)-y(j))2); if (d>0)&&(d |
 图1 智能体集群运动模型
图1 智能体集群运动模型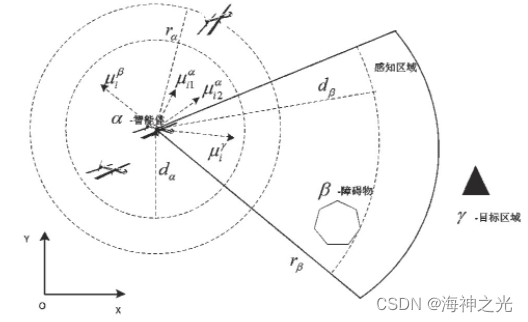 图2 第i个α-智能体的控制示意图
图2 第i个α-智能体的控制示意图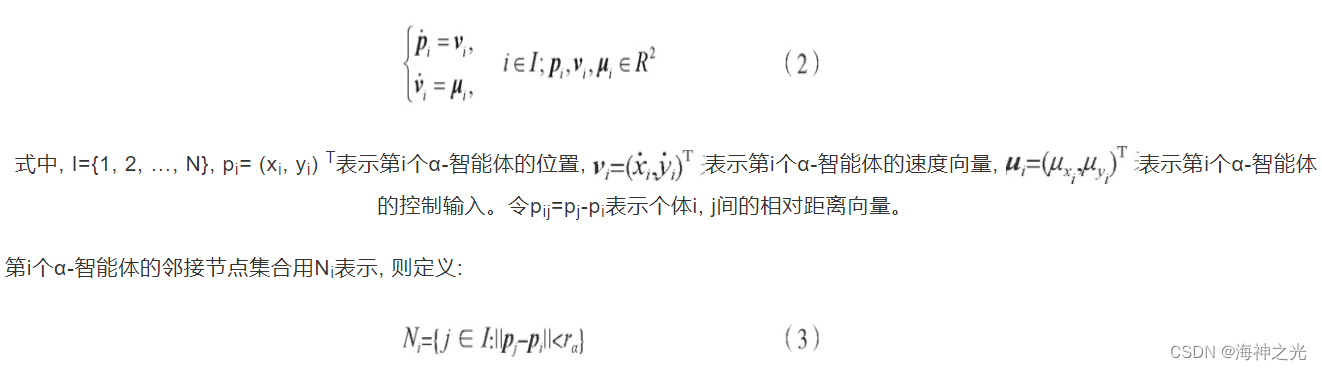 α-智能体的邻接矩阵用A=[aij]表示, 其中对于∀i∈I:j≠i, j∈Ni, aij>0;否则, aij=0。 为了构建群集运动的一个光滑集成势场以及构建一个邻接网络的空间邻接矩阵, 定义一个叫做σ范式的非负地图。
α-智能体的邻接矩阵用A=[aij]表示, 其中对于∀i∈I:j≠i, j∈Ni, aij>0;否则, aij=0。 为了构建群集运动的一个光滑集成势场以及构建一个邻接网络的空间邻接矩阵, 定义一个叫做σ范式的非负地图。 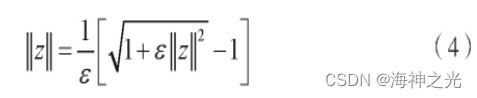 并用冲击函数来构建光滑势场函数以及光滑邻接矩阵, 选择冲击函数如下:
并用冲击函数来构建光滑势场函数以及光滑邻接矩阵, 选择冲击函数如下: 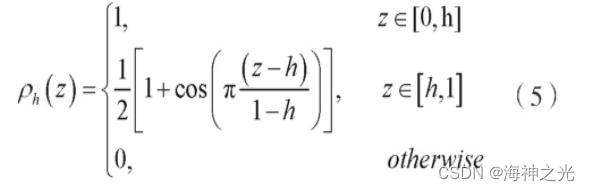 其中, h∈ (0, 1) 。用这个冲击函数, 可以定义空间邻接矩阵A § :
其中, h∈ (0, 1) 。用这个冲击函数, 可以定义空间邻接矩阵A § :  当第i个α-智能体与邻接节点保持距离dα时, 认为其几何结构处于稳定状态, 即
当第i个α-智能体与邻接节点保持距离dα时, 认为其几何结构处于稳定状态, 即  α-智能体群体之间根据Reynolds提出的聚集行为三条基本规则, 避撞、结对、聚集, 构建一个光滑的成对势场, 描述了任意两个α-智能体之间内部的运动规则。
α-智能体群体之间根据Reynolds提出的聚集行为三条基本规则, 避撞、结对、聚集, 构建一个光滑的成对势场, 描述了任意两个α-智能体之间内部的运动规则。  式中, c1α, c2α为加权系数。
式中, c1α, c2α为加权系数。
【本文地址】
今日新闻 |
推荐新闻 |