自动控制理论(7) |
您所在的位置:网站首页 › 自动控制原理在线作业5 › 自动控制理论(7) |
自动控制理论(7)
|
系列文章目录
自动控制理论(1)——自动控制理论概述 自动控制理论(2)——控制系统的数学模型(微分方程、传递函数) 自动控制理论(3)——控制系统的数学模型(系统框图和信号流图) 自动控制理论(4)——系统的时域性能指标和一阶系统的时域分析 自动控制理论(5)——二阶系统的时域分析 自动控制理论(6)——高阶系统的时域分析及线性系统的稳定性分析 文章目录 系列文章目录一、稳态误差的定义二、系统类型三、给定输入信号下的稳态误差1. r ( t ) = A ∗ 1 ( t ) \ r_{(t)}=A*1(t) r(t)=A∗1(t)2. r ( t ) = A t \ r_{(t)}=At r(t)=At3. r ( t ) = A t 2 2 \ r_{(t)}=\frac{At^2}{2} r(t)=2At24.总结 四、扰动稳态误差五、用动态误差系数法计算稳态误差六、减小稳态误差的措施 一、稳态误差的定义
上式表明,影响稳态误差的因素是开环增益、输入信号及开环传递函数中积分环节的数目。因此在研究稳态误差时,按系统开环传递函数中积分环节的个数分类, 三、给定输入信号下的稳态误差 1. r ( t ) = A ∗ 1 ( t ) \ r_{(t)}=A*1(t) r(t)=A∗1(t)e s s = A 1 + K P \ e_{ss}=\frac{A}{1+K_P} ess=1+KPA K P = lim s → 0 G ( s ) H ( s ) \ K_P={\lim_{s\to0}G(s)H(s)} KP=s→0limG(s)H(s) K P K_P KP——静态位置误差系数 2. r ( t ) = A t \ r_{(t)}=At r(t)=Ate s s = A K v \ e_{ss}=\frac{A}{K_v} ess=KvA K v = lim s → 0 s G ( s ) H ( s ) \ K_v={\lim_{s\to0}sG(s)H(s)} Kv=s→0limsG(s)H(s) K v K_v Kv——静态速度误差系数 3. r ( t ) = A t 2 2 \ r_{(t)}=\frac{At^2}{2} r(t)=2At2e s s = A K a \ e_{ss}=\frac{A}{K_a} ess=KaA K a = lim s → 0 s 2 G ( s ) H ( s ) \ K_a={\lim_{s\to0}s^2G(s)H(s)} Ka=s→0lims2G(s)H(s) K v K_v Kv——静态加速度误差系数 4.总结
静态误差系数法只反映误差极限值,动态误差系数法可研究任意输入信号引起的误差随时间的变化规律. |



 e
s
n
e_{sn}
esn只与扰动作用点之前的
G
1
G_1
G1有关 一般n(t)多为阶跃信号,故常在G1(s)中设置一 个积分环节。
e
s
n
e_{sn}
esn只与扰动作用点之前的
G
1
G_1
G1有关 一般n(t)多为阶跃信号,故常在G1(s)中设置一 个积分环节。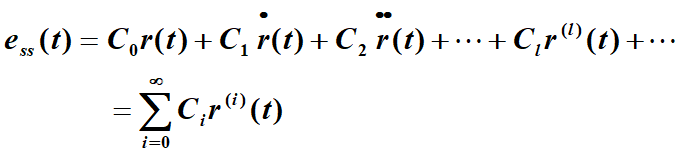 C0为动态位置误差系数; C1为动态速度误差系数; C2为动态加速度误差系数 将
ϕ
e
(
s
)
ϕ_e(s)
ϕe(s)写成按s多项式比值形式(按s的升幂排列写),用长除法得到一个s的升幂级数。
ϕ
e
(
s
)
=
C
0
+
C
1
s
+
C
2
s
2
+
C
3
s
3
+
.
.
.
ϕ_e(s)=C_0+C_1s+C_2s^2+C_3s^3+...
ϕe(s)=C0+C1s+C2s2+C3s3+...
C0为动态位置误差系数; C1为动态速度误差系数; C2为动态加速度误差系数 将
ϕ
e
(
s
)
ϕ_e(s)
ϕe(s)写成按s多项式比值形式(按s的升幂排列写),用长除法得到一个s的升幂级数。
ϕ
e
(
s
)
=
C
0
+
C
1
s
+
C
2
s
2
+
C
3
s
3
+
.
.
.
ϕ_e(s)=C_0+C_1s+C_2s^2+C_3s^3+...
ϕe(s)=C0+C1s+C2s2+C3s3+...【本文地址】
今日新闻 |
推荐新闻 |