[干货]ABB输入输出指令 |
您所在的位置:网站首页 › 编程mod什么指令 › [干货]ABB输入输出指令 |
[干货]ABB输入输出指令
|
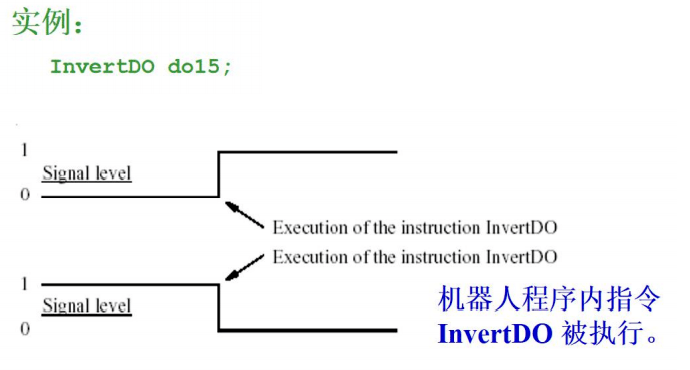
InvertDO Signal; Signal: 输出信号名称。 ( signaldo ) 应用:将机器人输出信号值反转,0 为 1,1 为 0,在系统参数内也可定义。
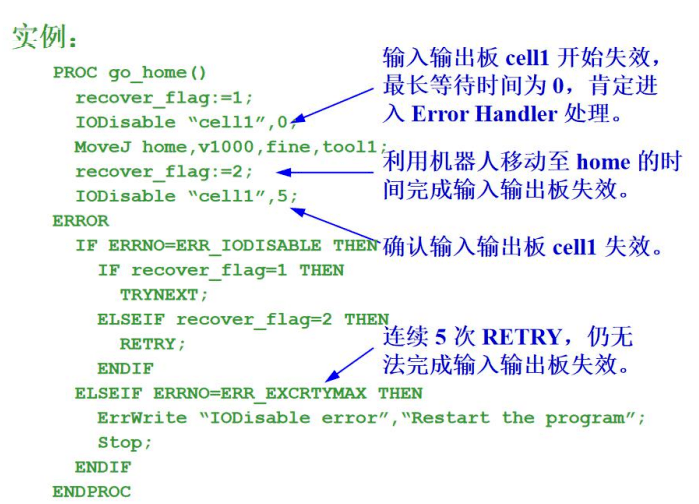
IODisable UnitName, MaxTime; UnitName: 输入输出板名称。( num ) MaxTime: 最长等待时间。( num ) 应用:通过指令可以使机器人输入输出板在程序运行时自动失效,系统将一块输入输出板失效需要 2-5 秒。如果失效时间超过最长等待时间,系统将进入 Error Handler 处理,错误代码为 ERR_IODISABLE,如果例行程 序没有 Error Handler 机器人将停机报错。 Error Handling:
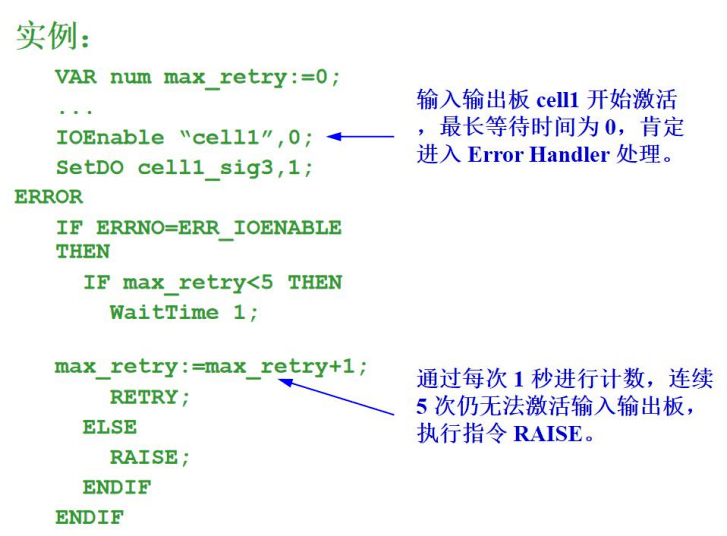
ERR_IODISABLE 超过最长等待时间,系统仍未完成输入输出板失效。ERR_CALLIO_INTER 系统在执行输入输出板失效与激活时,当前输入输出板再次被失效或激活,形成冲突。 ERR_NAME_INVALID 输入输出板名称错误或无法进行失效与激活操作。 IOEnable UnitName, MaxTime; UnitName:输入输出板名称。( num ) MaxTime: 最长等待时间。( num ) 应用:通过这指令可以使机器人输入输出板在程序运行时自动激活,系统将一块输入输出板激活需要 2-5 秒。如果激活时间超过最长等待时间,系统将进入 Error Handler 处理,错误代码为 ERR_IOENABLE,如果例行程 序没有 Error Handler 机器人将停机报错。
Error Handling: ERR_IOENABLE 超过最长等待时间,系统仍未完成输入输出板激活。 ERR_CALLIO_INTER 系统在执行输入输出板失效与激活时,当前输入输出板再次被失效或激活,形成冲突。 ERR_NAME_INVALID 输入输出板名称错误或无法进行失效与激活操作。 PulseDO [\High][\PLength] Signal; [\High]: 输出脉冲时,输出信号可以处在高电平。( switch ) [\Plength]: 脉冲长度,0.1s-32s,默认值为 0.2s。( num ) Signal: 输出信号名称。( signaldo ) 应用:机器人输出数字脉冲信号,一般作为运输链完成信号或计数信号。
限制:机器人脉冲输出长度小于 0.01 秒,系统将报错,不得不重新热启动。
Reset Signal; Signal: 机器人输出信号名称。( signaldo ) 应用:将机器人相应数字输出信号值置为 0,与指令 Set 对应,是自动化重要组成部分。
Reset Signal; Signal: 机器人输出信号名称。( signaldo ) 应用:将机器人相应数字输出信号值置为 0,与指令 Set 对应,是自动化重要组成部分。
SetAO Signal, Value; Signal: 模拟量输出信号名称。( signalao ) Value: 模拟量输出信号值。( num ) 应用:机器人当前模拟量输出信号输出相应的值,例如:机器人焊接时,通过模拟量输出控制焊接电压与 送丝速度。
|




 返回搜狐,查看更多
返回搜狐,查看更多【本文地址】
今日新闻 |
推荐新闻 |