(Intel®):Realsense D435i成像原理以及相关参数 |
您所在的位置:网站首页 › 相机固定器 › (Intel®):Realsense D435i成像原理以及相关参数 |
(Intel®):Realsense D435i成像原理以及相关参数
|
一、简介
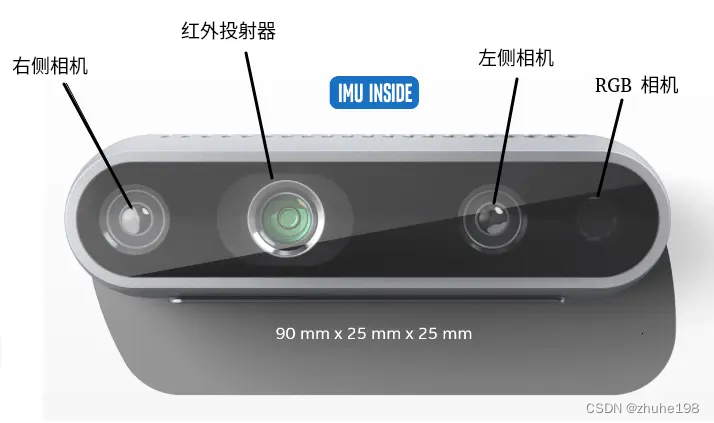
随着机器视觉,自动驾驶等颠覆性的技术逐步发展,采用 3D 相机进行物体识别,行为识别,场景 建模的相关应用越来越多,可以说深度相机就是终端和机器人的眼睛,那么什么是深度相机呢,跟之前的普通相机(2D)想比较,又有哪些差别? 深度相机又称之为3D相机,顾名思义,就是通过该相机能检测出拍摄空间的景深距离,这也是与普通摄像头最大的区别。 目前市面上常有的深度相机方案有以下三种: (1) 结构光(Structured-light),代表公司有奥比中光,苹果(Prime Sense),微软 Kinect-1,英特尔 RealSense, Mantis Vision 等; (2) 双目视觉(Stereo),代表公司 Leap Motion, ZED, 大疆; (3) 光飞行时间法(TOF),代表公司微软 Kinect-2,PMD,SoftKinect, 联想 Phab。 本文介绍的便是英特尔公司推出的一款消费级深度相机 -- Intel RealSense D435i,它的主要构成如下图所示。它主要包含一个RGB相机、两个红外相机以及一个红外发射器,此外还有一个IMU单元(这也就是D435i和D435的区别,i就表示imu)。
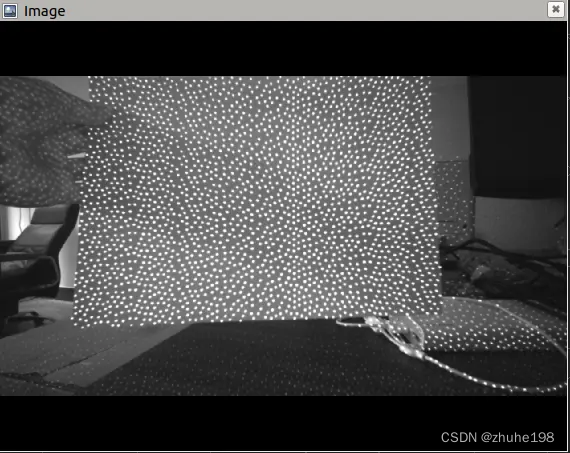
Interl RealSence D4×× 系列,包括 D435i,都是采用经典的双目视觉的方式测量深度。尽管具有红外投射器,但并不是采用红外反射测距。它的作用仅仅是投射不可见的固定的红外纹理样式,提高在纹理不明显的环境中(例如白墙)的深度计算精度,辅助双目视觉测距。左右两个相机将图像数据送入内置的深度处理器,在其中基于双目测距的原理计算每个像素的深度值。 下图显示的是红外投射在白纸上的纹理模式:
|
【本文地址】