【学习总结】激光雷达与相机外参标定:原理与代码1 |
您所在的位置:网站首页 › 相机像素映射原理 › 【学习总结】激光雷达与相机外参标定:原理与代码1 |
【学习总结】激光雷达与相机外参标定:原理与代码1
|
2023年2月重要补充
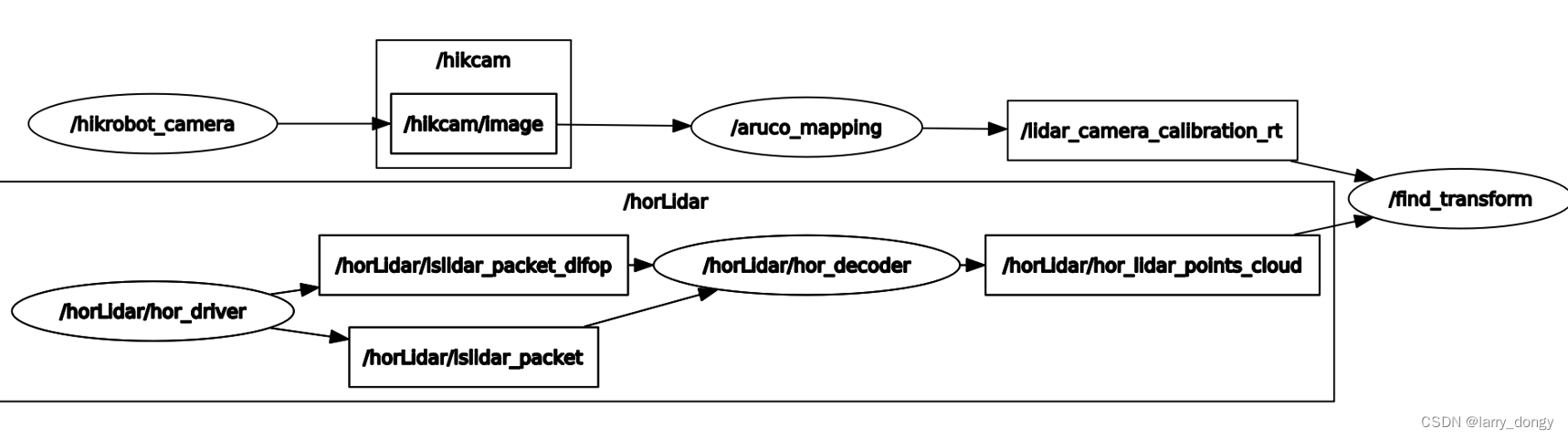
这个代码我个人觉得不好用且坑太多,所以后来换了一个。推荐大家用新的代码。 详见更新的一篇博客总结:【学习总结】激光雷达与相机外参标定:代码(cam_lidar_calibration) 这一周多学习并调试了激光雷达和相机外参标定的代码,踩了一堆坑,特此记录。 0. 参考资料:代码来源:https://github.com/ankitdhall/lidar_camera_calibration 参考论文:LiDAR-Camera Calibration using 3D-3D Point correspondences 修改后的代码:https://github.com/LarryDong/lidar_camera_calibration 之前找了几个开源的标定代码,在github上看就这个代码具有最多的star,觉得比较靠谱。结果这个代码写的真的一言难尽:逻辑混乱,需要注意的细节极其多,以及存在不少坑。这一个多星期,就是踩坑和调试。今天终于能够正常运行出一个正确(但并不准确)的结果,在此记录。 代码混乱的原因: 大量变量定义未使用,以及定义与实际使用的距离太远,让人误解;需要修改多个参数文件,参数管理混乱;参数由不同文件读取,同时一些临时变量也存储到文件中再在不同函数中读取调用,以及全局变量的使用;官方使用文档一些细节没有强调。 1. 基本原理计算雷达和相机的外参,基本原理较为简单:只需要找雷达系下的点与相机系下对应点的坐标关系,然后计算外参即可。之前一篇博客总结了几种常用的方法:【学习记录】激光雷达与相机标定 问题核心是,如何确定对应关系,即correspondence? 所采用的代码的基本原理:用一块矩形纸板,用激光雷达检测纸板的边界线,之后确定纸板的角点,获取纸板角点在lidar系下的坐标;而相机本身角点无法提供深度信息,但我们可以通过aruco提供带深度的marker的角点,再计算纸板四个角的坐标。 2. 代码总览
|
 首先需要按照原始代码
首先需要按照原始代码【本文地址】
今日新闻 |
推荐新闻 |