基于STM32F103ZET6单片机实现AB相磁性霍尔TT减速电机跑小车(个人学习记录,仅供参考) |
您所在的位置:网站首页 › 直流减速电机原理简述 › 基于STM32F103ZET6单片机实现AB相磁性霍尔TT减速电机跑小车(个人学习记录,仅供参考) |
基于STM32F103ZET6单片机实现AB相磁性霍尔TT减速电机跑小车(个人学习记录,仅供参考)
|
一、简介
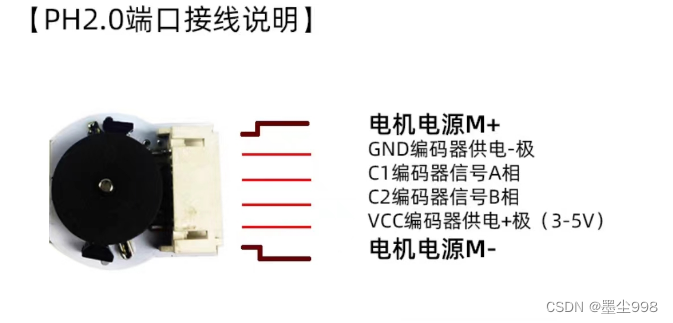
减速电机都会有自己的编码盘。从编码器检测原理上来分,常见的是光电编码器(光学式)和霍尔编码器(磁式)。我们所学的减速电机是AB相磁性霍尔TT减速电机,它所用的是霍尔码盘。霍尔编码器是一种通过磁电转换将输出轴上的机械几何位移量转换成脉冲或数字量的传感器。
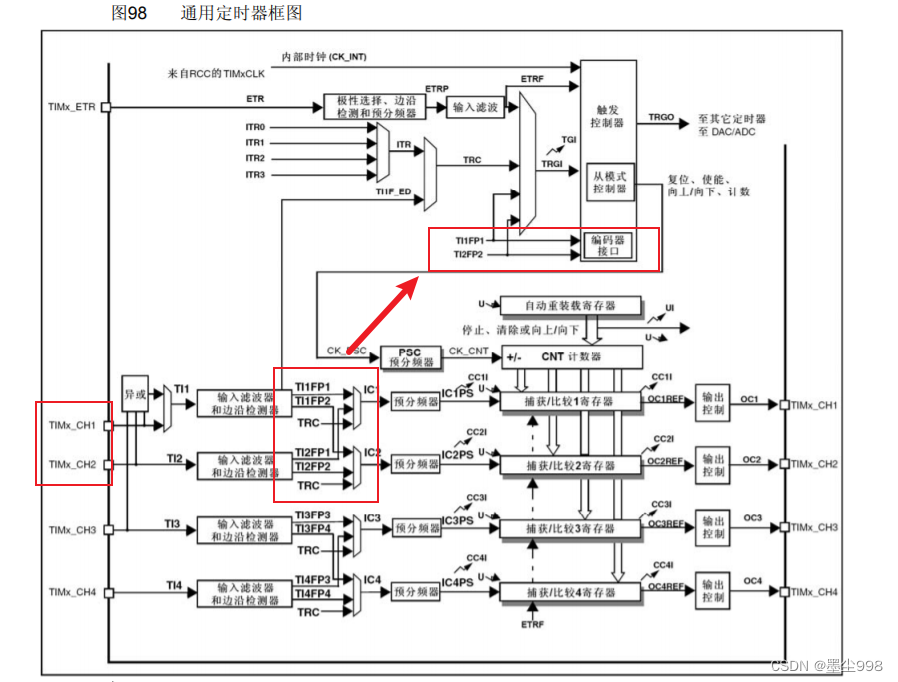
这款减速电机的传动比是1:90,它的基础脉冲数是12PPR,一圈有12个磁极,可以输出12个高电平。根据脉冲数可以算出减速电机输入轴的圈数,减速盘有12个磁极,因为是AB双相脉冲信号检测且每一相检测脉冲的上升沿与下降沿两次信号,所以检测到的实际脉冲数是4倍频的脉冲数,除以4之后才是输入轴减速盘的实际脉冲数,根据此值就能计算出输入轴所转圈数和输出轴所转圈数。 圈数=脉冲数/4/12/90 距离=圈数*轮子周长 二、开始实践 2.1编码器接口
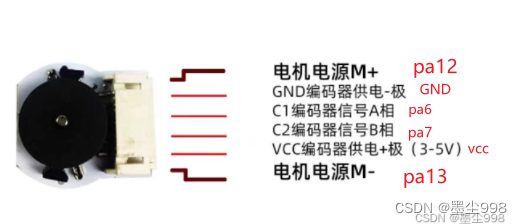
timer.c void TIM4_PWM_Init(u16 arr,u16 psc) { GPIO_InitTypeDef GPIO_InitStructure; TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure; TIM_OCInitTypeDef TIM_OCInitStructure; RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM4, ENABLE); //使能定时器4时钟 RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOD | RCC_APB2Periph_AFIO, ENABLE); //使能GPIO外设和AFIO复用功能模块时钟 GPIO_PinRemapConfig(GPIO_Remap_TIM4, ENABLE); //Tim4完全重映射 //设置该引脚为复用输出功能,输出TIM3 CH1 2的PWM脉冲波形 GPIO_InitStructure.GPIO_Pin = GPIO_Pin_12 | GPIO_Pin_13 | GPIO_Pin_14 | GPIO_Pin_15; //TIM_CH2 GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出 GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_Init(GPIOD, &GPIO_InitStructure);//初始化GPIO //设置该引脚为复用输出功能,输出TIM3 CH3 4的PWM脉冲波形 //初始化TIM4 TIM_TimeBaseStructure.TIM_Period = arr; //设置在下一个更新事件装入活动的自动重装载寄存器周期的值 TIM_TimeBaseStructure.TIM_Prescaler =psc; //设置用来作为TIMx时钟频率除数的预分频值 TIM_TimeBaseStructure.TIM_ClockDivision = 0; //设置时钟分割:TDTS = Tck_tim TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式 TIM_TimeBaseInit(TIM4, &TIM_TimeBaseStructure); //根据TIM_TimeBaseInitStruct中指定的参数初始化TIMx的时间基数单位 //初始化TIM4 Channel2 PWM模式 TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; //选择定时器模式:TIM脉冲宽度调制模式2 TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //比较输出使能 TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //输出极性:TIM输出比较极性高 TIM_OC1Init(TIM4, &TIM_OCInitStructure); //根据T指定的参数初始化外设 TIM_OC2Init(TIM4, &TIM_OCInitStructure); //根据T指定的参数初始化外设 TIM_OC3Init(TIM4, &TIM_OCInitStructure); //根据T指定的参数初始化外设 TIM_OC4Init(TIM4, &TIM_OCInitStructure); //根据T指定的参数初始化外设 TIM_OC1PreloadConfig(TIM4, TIM_OCPreload_Enable); //使能TIM4在CCR1上的预装载寄存器 TIM_OC2PreloadConfig(TIM4, TIM_OCPreload_Enable); //使能TIM4在CCR2上的预装载寄存器 TIM_OC3PreloadConfig(TIM4, TIM_OCPreload_Enable); //使能TIM4在CCR1上的预装载寄存器 TIM_OC4PreloadConfig(TIM4, TIM_OCPreload_Enable); //使能TIM4在CCR2上的预装载寄存器 TIM_Cmd(TIM4, ENABLE); //使能TIM3 } void TIM3_Encoder_Init(u16 arr,u16 psc) { GPIO_InitTypeDef GPIO_InitStructure; TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure; TIM_ICInitTypeDef TIM3_ICInitStructure; RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE); //使能TIM5时钟 RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); //使能GPIOA时钟 RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO, ENABLE); GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6 | GPIO_Pin_7; //PA GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING; //浮空输入 GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_Init(GPIOA, &GPIO_InitStructure);//初始化GPIO //初始化定时器5 TIM5 TIM_TimeBaseStructure.TIM_Period = arr; //设定计数器自动重装值 TIM_TimeBaseStructure.TIM_Prescaler =psc; //预分频器 TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1; //设置时钟分割:TDTS = Tck_tim TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式 TIM_TimeBaseInit(TIM5, &TIM_TimeBaseStructure); //根据TIM_TimeBaseInitStruct中指定的参数初始化TIMx的时间基数单位 TIM_EncoderInterfaceConfig(TIM3,TIM_EncoderMode_TI12,TIM_ICPolarity_Rising,TIM_ICPolarity_Rising); //初始化TIM5输入捕获参数 TIM3_ICInitStructure.TIM_Channel = TIM_Channel_1; //CC1S=01 选择输入端 IC1映射到TI1上 TIM3_ICInitStructure.TIM_ICPolarity = TIM_ICPolarity_Rising; //上升沿捕获 TIM3_ICInitStructure.TIM_ICSelection = TIM_ICSelection_DirectTI; //映射到TI1上 TIM3_ICInitStructure.TIM_ICPrescaler = TIM_ICPSC_DIV1; //配置输入分频,不分频 TIM3_ICInitStructure.TIM_ICFilter = 0xF;//IC1F=0000 配置输入滤波器 不滤波 TIM_ICInit(TIM3, &TIM3_ICInitStructure); TIM3_ICInitStructure.TIM_Channel = TIM_Channel_2; //CC1S=01 选择输入端 IC1映射到TI1上 TIM3_ICInitStructure.TIM_ICPolarity = TIM_ICPolarity_Rising; //上升沿捕获 TIM3_ICInitStructure.TIM_ICSelection = TIM_ICSelection_DirectTI; //映射到TI1上 TIM3_ICInitStructure.TIM_ICPrescaler = TIM_ICPSC_DIV1; //配置输入分频,不分频 TIM3_ICInitStructure.TIM_ICFilter = 0xF;//IC1F=0000 配置输入滤波器 不滤波 TIM_ICInit(TIM3, &TIM3_ICInitStructure); TIM_Cmd(TIM3,ENABLE ); //使能定时器3 TIM_EncoderInterfaceConfig(TIM3,TIM_EncoderMode_TI12,TIM_ICPolarity_Rising,TIM_ICPolarity_Rising); }main.c /******** 圈数 = 脉冲数 /12 /4 /90 一圈的脉冲数 = 4320 *******/ int main(void) { u16 cnt=0; delay_init(); //延时函数初始化 NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); //设置NVIC中断分组2:2位抢占优先级,2位响应优先级 uart_init(115200); //串口初始化为115200 LED_Init(); //LED端口初始化 TIM3_Encoder_Init(65535,0); TIM4_PWM_Init(899,0); while(1) { cnt=TIM_GetCounter(TIM3); printf("%d\r\n",cnt); //查看脉冲数,转一圈是否是4320 } 2.3连接
2.4验证 通过串口助手查看数值 |

【本文地址】
今日新闻 |
推荐新闻 |