理论力学笔记(九):刚体的运动与转动惯量 |
您所在的位置:网站首页 › 理论力学公式表 › 理论力学笔记(九):刚体的运动与转动惯量 |
理论力学笔记(九):刚体的运动与转动惯量
|
刚体的运动
在物理学里,理想刚体(rigid body) 是一种有限尺寸,可以忽略形变的固体。不论是否感受到外力,在刚体内部,质点与质点之间的距离都不会改变[1]^{[1]}[1]。 对于刚体来说,总共有 666 个自由度,其中 333 个为平动自由度,333 个为转动自由度。一般的刚体运动就对应这六个自由度。如果对这些自由度再进行一些限制,那么会得到一些特殊的运动模式。 按照自由度的数目,我们分为: 运动模式 平动自由度 转动自由度 总自由度 定轴转动 000 111 111 定点转动 000 333 333 平动 333 000 333 平面平行运动 222 111 333其中最基本的操作是刚体的转动与平动。 平动可以用质心位移 (x,y,c)(x,y,c)(x,y,c) 来描述,对于转动来说。我们可以通过固定在刚体上的坐标系(本体坐标系)的转动来描写[2]^{[2]}[2]。考虑本体坐标系的三个正交基矢为 {i,j,k}\{\bm{i},\bm{j},\bm{k}\}{i,j,k},通过转动操作后,基矢变为 {i′,j′,k′}\{\bm{i}',\bm{j}',\bm{k}'\}{i′,j′,k′},这可以用下列式子表示: (i′j′k′)=U(ijk)(1)\begin{pmatrix} \bm{i}'\\ \bm{j}'\\ \bm{k}'\\ \end{pmatrix} = U \begin{pmatrix} \bm{i}\\ \bm{j}\\ \bm{k}\\ \end{pmatrix}\tag{1} ⎝⎛i′j′k′⎠⎞=U⎝⎛ijk⎠⎞(1) 其中 UUU 为一个正交矩阵。由此,我们可以使用 UUU 去表征这个转动操作。一个3×33\times 33×3 的正交矩阵只有 333 个独立变量,正好对应 333 个转动自由度。反过来,任意一个 3×33\times 33×3正交矩阵必定对应一个转动操作。这意味着多个连续进行的转动操作 UiU_iUi 都可以使用一个转动操作 U=Un⋯U1U = U_n\cdots U_1U=Un⋯U1 代替: UTU=(Un⋯U1)TUn⋯U1=U1T⋯UnTUn⋯U1=1(2)\begin{aligned} U^T U &= (U_n\cdots U_1)^TU_n\cdots U_1\\ & = U_1^T\cdots U_n^TU_n \cdots U_1\\ & = 1 \end{aligned}\tag{2} UTU=(Un⋯U1)TUn⋯U1=U1T⋯UnTUn⋯U1=1(2) 欧拉转动定理 告诉我们,对于任意一个转动操作 UUU,均存在一根轴 n^\hat{\bm{n}}n^ 使得: Un^=n^(3)U \hat{\bm{n}} = \hat{\bm{n}}\tag{3} Un^=n^(3) 此时 n^\hat{\bm{n}}n^ 就是 UUU 的本征值为 111 的本征向量。为此我们只要证明 111 是 UUU 的一个本征值,那么 (3)(3)(3) 式自然得证。我们有: det(U−I)=det(U−UUT)=detUdet(I−UT)=det(I−U)T=det(I−U)=(−1)3det(U−I)\begin{aligned} \det (U-I) & =\det (U-UU^T)\\ & = \det{U}\det(I-U^T)\\ & = \det (I-U)^T\\ & = \det (I-U) \\ & = (-1)^3 \det(U-I) \end{aligned} det(U−I)=det(U−UUT)=detUdet(I−UT)=det(I−U)T=det(I−U)=(−1)3det(U−I) 于是得到: det(U−I)=0\det (U-I) = 0 det(U−I)=0 得证 因此,任意一个转动操作都可以看作绕一根轴 n^\hat{\bm{n}}n^ 转动一定角度 ϕ\phiϕ 完成。 从这个角度来看转动的自由度(不考虑质心的平动,因此选取的转轴总经过质心):轴(取向)选取的自由度为 222,绕轴转动的自由度为 111。 当轴 n^\hat{\bm{n}}n^ 固定时,对应的转动为定轴转动,自由度为 111。 对于定点运动,转轴总过一固定点,此时的自由度就为转动自由度 333。平面运动 指存在一平面,使得刚体上任一点到该平面的垂直距离始终不变。此时转轴的取向不改变,转动自由度为 111,由于任意一点都被限制在一个平面上,对应的平动自由度为 222,总自由度为 333。 对于有限转动,若已知转轴 n^\hat{\bm{n}}n^,转动角度 ϕ\phiϕ,我们可以给出任意一点 r\bm{r}r 转动后对应的位置 r′\bm{r}'r′: r′=(r⋅n^)n^+(r−(r⋅n^)n^)cosϕ+n^×rsinϕ(4)\bm{r}' = (\bm{r}\cdot\hat{\bm{n}})\hat{\bm{n}} + (\bm{r}-(\bm{r}\cdot\hat{\bm{n}})\hat{\bm{n}}) \cos\phi + \hat{\bm{n}}\times\bm{r}\sin\phi \tag{4} r′=(r⋅n^)n^+(r−(r⋅n^)n^)cosϕ+n^×rsinϕ(4) 考虑无限小转动,根据 (4)(4)(4) 得到: r′=r+n^×rδϕ\bm{r'} = \bm{r} +\hat{\bm{n}}\times\bm{r} \delta\phi r′=r+n^×rδϕ 有: δr=r−r′=n^×rδϕ(5)\delta \bm{r} = \bm{r} - \bm{r}' = \hat{\bm{n}}\times\bm{r} \delta\phi\tag{5} δr=r−r′=n^×rδϕ(5) 转动速度可写为: v=ϕ˙n^×r=ω×r(6)\begin{aligned} \bm{v} &= \dot{\phi} \hat{\bm{n}} \times \bm{r}\\ & = \bm{\omega}\times\bm{r} \end{aligned}\tag{6} v=ϕ˙n^×r=ω×r(6) ω=ωn^\bm{\omega} = \omega \hat{\bm{n}}ω=ωn^ 为角速度矢量。 注意无穷小转动是可以交换的,因此对应的角速度是一个矢量,而角位移无法定义为一个矢量。 对于刚体上的任意点 PPP,其速度可以利用刚体角速度 ω\omegaω 与一给定点 AAA 速度 vAv_AvA 表出: vP=vA+ω×(rP−rA)(7)\bm{v}_P = \bm{v}_A + \omega \times (\bm{r}_P - \bm{r}_A) \tag{7} vP=vA+ω×(rP−rA)(7) 刚体的转动惯量利用式 (7)(7)(7) 可以给出刚体角动量的表达式。考虑刚体由 iii 个质量为 mim_imi,位矢为 ri\bm{r}_iri 的质点构成。其角动量可以写为(以原点为参考点): L=∑imiri×[vA+ω×(ri−rA)]=MR×vA+M[(R⋅ω)rA−(R⋅rA)ω]+∑imi[ri2ω−(ri⋅ω)ri](8)\begin{aligned} \bm{L} &= \sum_i m_i\bm{r}_i \times [\bm{v}_A + \omega\times(\bm{r}_i - \bm{r}_A)]\\ &= M\bm{R}\times\bm{v}_A + M[(\bm{R}\cdot\bm{\omega})\bm{r}_A-(\bm{R}\cdot\bm{r}_A)\bm{\omega}] + \sum_i m_i[\bm{r}_i^2\bm{\omega}-(\bm{r}_i\cdot\bm{\omega})\bm{r}_i] \tag{8} \end{aligned} L=i∑miri×[vA+ω×(ri−rA)]=MR×vA+M[(R⋅ω)rA−(R⋅rA)ω]+i∑mi[ri2ω−(ri⋅ω)ri](8) 我们来考虑表达式 (8)(8)(8) 各项的物理意义,第一项为所选取的参考点的平动所带来的角动量。若选取一固定点考察角动量,即 vA=0\bm{v}_A = 0vA=0,那么第一项为零;第二项为质心的整体运动对应的角动量,若选取质心为参考点,即 rA=R\bm{r}_A = \bm{R}rA=R,那么第二项恰好是刚体质心运动绕原点的角动量;第三项描述组成刚体的各个质点对应的角动量(扣除了整体平动部分),其与系统的质量分布密切相关。 其中第三项写出分量形式为: Lμ=∑ν∑imi(ri2δμν−riμriν)ων=Iμνων=IμνωνL_{\mu} = \sum_{\nu}\sum_{i}m_i(r_i^2\delta_{\mu\nu}-r_{i\mu}r_{i\nu})\omega_{\nu} = I_{\mu\nu}\omega_{\nu} = I_{\mu\nu}\omega_{\nu} Lμ=ν∑i∑mi(ri2δμν−riμriν)ων=Iμνων=Iμνων 这里定义了惯量矩阵: I=∑imi(ri2δμν−riμriν)(9)I = \sum_i m_i(r_i^2\delta_{\mu\nu}-r_{i\mu}r_{i\nu}) \tag{9} I=i∑mi(ri2δμν−riμriν)(9) 于是有: Lμ=Iμνων(10)L_{\mu} = I_{\mu\nu}\omega_{\nu} \tag{10} Lμ=Iμνων(10) 写为矩阵形式: Iμν=∑imi(yi2+zi2−xiyi−xizi−xiyixi2+zi2−yizi−xizi−yizixi2+yi2)I_{\mu\nu} = \sum_i m_i\begin{pmatrix} y_i^2+z_i^2 & -x_iy_i & -x_iz_i \\ -x_iy_i & x_i^2+z_i^2 & -y_iz_i \\ -x_iz_i & -y_iz_i & x_i^2+y_i^2 \\ \end{pmatrix} Iμν=i∑mi⎝⎛yi2+zi2−xiyi−xizi−xiyixi2+zi2−yizi−xizi−yizixi2+yi2⎠⎞ 对于质量连续分布的系统,求和很自然的转变为积分。 分别选取原点、质心为参考点,利用 (8)(8)(8) 给出两种情况下的转动惯量: I(A=O)=I(A=CM)+M[(R⋅R)ω−(R⋅ω)R]I(A=O)=I(A=CM) + M[(\bm{R}\cdot\bm{R})\bm{\omega} - (\bm{R}\cdot\bm{\omega})\bm{R}] I(A=O)=I(A=CM)+M[(R⋅R)ω−(R⋅ω)R] 此即 平行轴定理。 转动惯量的计算 匀质杆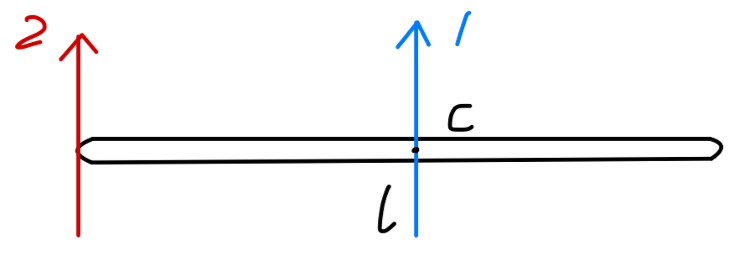
Fig1:匀质杆 绕轴 111: I1=∫x2dm=∫−l2l2x2λdx=112λl3=112ml2\begin{aligned} I_1 &= \int x^2dm\\ &= \int_{-\frac{l}{2}}^{\frac{l}{2}} x^2\lambda dx\\ &= \frac{1}{12}\lambda l^3 = \frac{1}{12}ml^2\\ \end{aligned} I1=∫x2dm=∫−2l2lx2λdx=121λl3=121ml2 绕轴 222: I2=∫x2dm=∫0lx2λdx=13λl3=13ml2\begin{aligned} I_2 &= \int x^2dm\\ &= \int_{0}^{l} x^2\lambda dx\\ &= \frac{1}{3}\lambda l^3 = \frac{1}{3}ml^2\\ \end{aligned} I2=∫x2dm=∫0lx2λdx=31λl3=31ml2 以上结果可以根据平行轴定理得到: I2=I1+m(12l)2I_2 = I_1 + m(\frac{1}{2}l)^2 I2=I1+m(21l)2 圆盘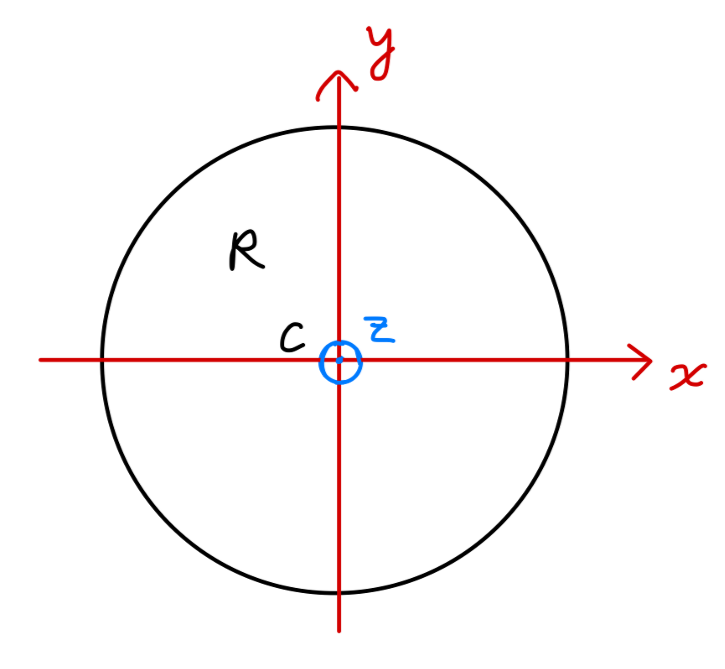
Fig2:圆盘 绕 zzz 轴: Iz=∫ρ2dm=∬ρ2σρdρdθ=σ∫02πdθ∫0Rρ3dρ=π2σR4=12mR2\begin{aligned} I_{z} &= \int \rho^2 dm \\ &= \iint \rho^2 \sigma \rho d\rho d\theta\\ &= \sigma \int_{0}^{2\pi}d\theta \int_{0}^{R}\rho^3d\rho \\ &= \frac{\pi}{2}\sigma R^4 = \frac{1}{2}mR^2\\ \end{aligned} Iz=∫ρ2dm=∬ρ2σρdρdθ=σ∫02πdθ∫0Rρ3dρ=2πσR4=21mR2 绕 xxx 轴(或绕 yyy 轴): Ix=∫ρ2dm=∬y2σdxdy=σ∫−RRdx∫−R2−x2R2−x2y2dy=σ∫−RR23(R2−x2)32dx=14mR2\begin{aligned} I_{x} &= \int \rho^2 dm \\ &= \iint y^2 \sigma dx dy\\ &= \sigma \int_{-R}^{R}dx \int_{-\sqrt{R^2-x^2}}^{\sqrt{R^2-x^2}}y^2dy \\ &= \sigma \int_{-R}^{R}\frac{2}{3}(R^2-x^2)^{\frac{3}{2}}dx\\ &= \frac{1}{4}mR^2\\ \end{aligned} Ix=∫ρ2dm=∬y2σdxdy=σ∫−RRdx∫−R2−x2R2−x2y2dy=σ∫−RR32(R2−x2)23dx=41mR2 对于平面质量分布的系统,将有: Iz=Ix+IyI_z = I_x + I_y Iz=Ix+Iy 其中 zzz 轴为垂直于该平面的惯量主轴。 以上两种情形的惯性张量都是对角的,现在来看惯性张量非对角的情况。 立方体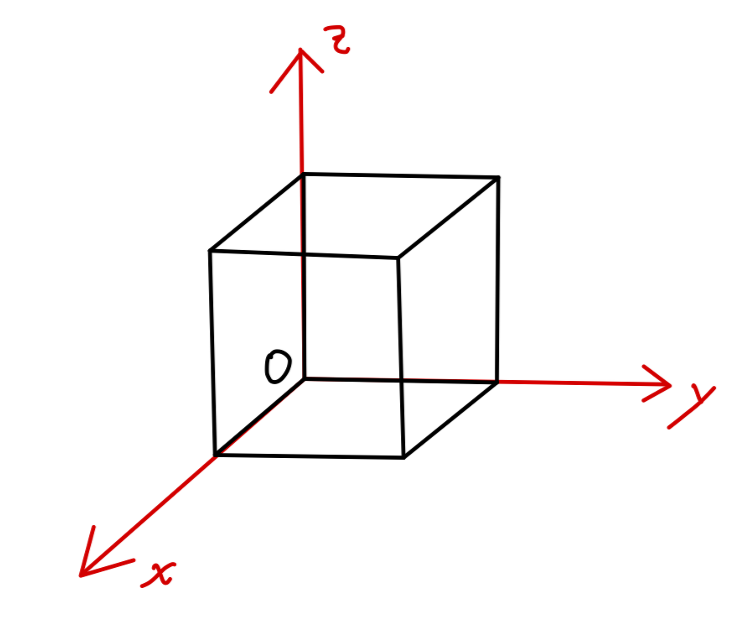
Fig3:立方体 计算绕着一个顶点的惯性张量: I11=I22=I33=∭dxdydz(x2+y2)=23ma2I12=I13=I23=∭dxdydz(−xy)=−14ma2\begin{aligned} &I_{11} = I_{22} = I_{33} = \iiint dxdydz (x^2+y^2) = \frac{2}{3}ma^2\\ &I_{12} = I_{13} = I_{23} = \iiint dxdydz (-xy) = -\frac{1}{4}ma^2\\ \end{aligned} I11=I22=I33=∭dxdydz(x2+y2)=32ma2I12=I13=I23=∭dxdydz(−xy)=−41ma2 于是其绕顶点的惯性张量矩阵为: I=ma2(23−14−14−1423−14−14−1423)I = ma^2 \begin{pmatrix} \frac{2}{3} & -\frac{1}{4} & -\frac{1}{4}\\ -\frac{1}{4} & \frac{2}{3} & -\frac{1}{4}\\ -\frac{1}{4} & -\frac{1}{4} & \frac{2}{3}\\ \end{pmatrix} I=ma2⎝⎛32−41−41−4132−41−41−4132⎠⎞ 惯量主轴一般来说,刚体的角动量 L\bm{L}L 与角速度 ω\bm{\omega}ω 并不同向。若角速度 ω\omegaω 沿着 III 的本征矢方向时,有: Iωi=IiωiI\omega_i = I_i\omega_i Iωi=Iiωi 如此惯性张量的三个本征矢成为三个 惯量主轴,绕对应主轴的转动惯量为 主转动惯量。 例如将立方体绕顶点的转动惯量的本征值、本征矢量为: I1=I2=1112ma2,I3=16ma2\begin{aligned} I_1 = I_2 = \frac{11}{12}ma^2,\quad I_3=\frac{1}{6}ma^2\\ \end{aligned} I1=I2=1211ma2,I3=61ma2 u1=(1−10)u2=(11−2)u3=(111)u_1 = \begin{pmatrix} 1\\ -1\\ 0\\ \end{pmatrix}\quad u_2 = \begin{pmatrix} 1\\ 1\\ -2\\ \end{pmatrix}\quad u_3 = \begin{pmatrix} 1\\ 1\\ 1\\ \end{pmatrix} u1=⎝⎛1−10⎠⎞u2=⎝⎛11−2⎠⎞u3=⎝⎛111⎠⎞ 其中 u1,u2u_1,u_2u1,u2 张成一个二维简并空间。惯性主轴可以取在这一平面中的任意方向。 刚体的动能刚体的动能写为: T=∑i12mivi2=∑i12mivi⋅[vA+ω×(ri−rA)]=12MV⋅(vA−ω×rA)+12∑iω⋅(ri×mivi)=12MV⋅(vA−ω×rA)+12ω⋅L\begin{aligned} T &= \sum_{i}\frac{1}{2}m_i\bm{v}_i^2\\ &= \sum_{i}\frac{1}{2}m_i\bm{v}_i\cdot[\bm{v}_A + \bm{\omega}\times(\bm{r}_i - \bm{r}_A)]\\ &= \frac{1}{2}M\bm{V}\cdot(\bm{v}_A-\bm{\omega}\times\bm{r}_A) + \frac{1}{2}\sum_i\bm{\omega}\cdot(\bm{r}_i\times m_i\bm{v}_i)\\ &= \frac{1}{2}M\bm{V}\cdot(\bm{v}_A-\bm{\omega}\times\bm{r}_A) + \frac{1}{2}\bm{\omega}\cdot\bm{L}\\ \end{aligned} T=i∑21mivi2=i∑21mivi⋅[vA+ω×(ri−rA)]=21MV⋅(vA−ω×rA)+21i∑ω⋅(ri×mivi)=21MV⋅(vA−ω×rA)+21ω⋅L 其中第三项为刚体相对于质心的转动动能: T=12Iμνωμων(11)T = \frac{1}{2}I_{\mu\nu}\omega_{\mu}\omega_{\nu} \tag{11} T=21Iμνωμων(11) 惯量椭球考虑角速度沿着任意方向的情况,考虑沿着该方向作定轴转动的转动惯量为 InI_nIn,那么转动的动能可以写为: T=12Inω2=12Iijωiωj=12Iijcosαicosαjω2\begin{aligned} T &= \frac{1}{2}I_{n}\omega^2\\ &= \frac{1}{2}I_{ij}\omega_i\omega_j\\ &= \frac{1}{2}I_{ij}\cos\alpha_i\cos\alpha_j \omega^2 \\ \end{aligned} T=21Inω2=21Iijωiωj=21Iijcosαicosαjω2 如此得到: In=Iijcosαicosαj(12)I_n = I_{ij}\cos\alpha_i\cos\alpha_j \tag{12} In=Iijcosαicosαj(12) 令:xi=cosαiInx_i = \frac{\cos\alpha_i}{\sqrt{I_n}}xi=Incosαi,如此式 (12)(12)(12) 成为一个二次方程: Iijxixj=1I_{ij}x_ix_j = 1 Iijxixj=1 这将对应一个椭球方程(因为惯性张量的三个本征值是正的,对应的动能是一个正定二次型),称为 惯量椭球。 惯量椭球具有如下性质: 惯量椭球上任意一点到原点的距离给出沿着该方向的转动惯量的倒数,因为:∑ixi2=∑icos2αi/In=1/In\sum_i x_i^2 = \sum_i \cos^2\alpha_i/I_n = 1/I_n i∑xi2=i∑cos2αi/In=1/In 法线方向给出角动量∇if=2Iijxj=2IijcosαjIn=2IijωjωIn=2LiωIn\begin{aligned} \nabla_i f &= 2I_{ij}x_j\\ &= 2I_{ij}\frac{\cos\alpha_j}{\sqrt{I_n}}\\ &= \frac{2I_{ij}\omega_j}{\omega\sqrt{I_n}}\\ &= \frac{2L_i}{\omega\sqrt{I_n}}\\ \end{aligned} ∇if=2Iijxj=2IijIncosαj=ωIn2Iijωj=ωIn2Li 潘索构造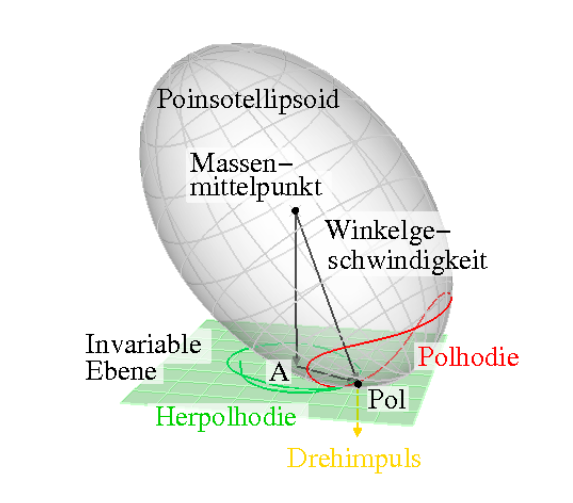
Fig4:潘索构造 潘索构造了一个利用几何方式可视化研究自由刚体运动的方法。称为 潘索构造。对于上图,我们注意到: OA=OPω⋅LωL=2TIpωL=2TL\begin{aligned} OA &= OP \frac{\bm{\omega}\cdot\bm{L}}{\omega L}\\ &= \frac{2T}{\sqrt{I_p}\omega L}\\ &= \frac{\sqrt{2T}}{L}\\ \end{aligned} OA=OPωLω⋅L=IpωL2T=L2T 对于自由刚体来说,角动量与动能是守恒的。如此 OAOAOA 成为一个定值。因此刚体的运动可以等价为固定高度的惯量椭球在平面上的滚动,这将给出角速度的运动轨迹。 比内椭球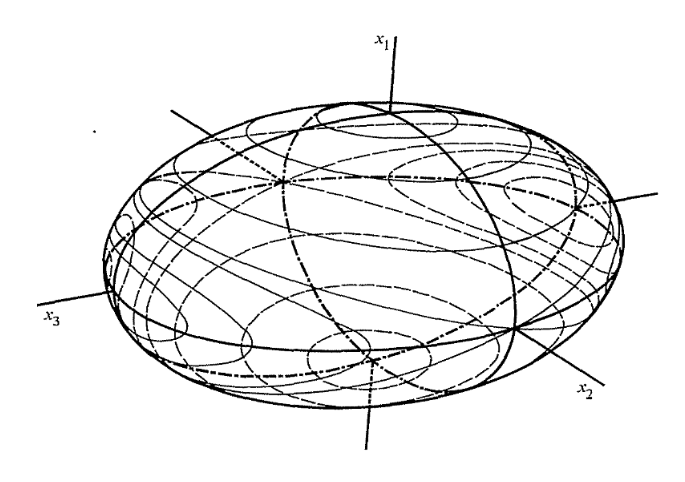
Fig5:比内椭球 给出能量与角动量为: T=L122I1+L222I2+L322I3L2=L12+L22+L32(13)\begin{aligned} T &= \frac{L_1^2}{2I_1} + \frac{L_2^2}{2I_2} + \frac{L_3^2}{2I_3}\\ L^2 &= L_1^2 + L_2^2 + L_3^2\\ \end{aligned}\tag{13} TL2=2I1L12+2I2L22+2I3L32=L12+L22+L32(13) 自由刚体在运动中角动量与能量守恒,式 (13)(13)(13) 给出的椭圆与球的交线将给出角动量在本体坐标系中的运动轨迹。 通过潘索构造与比内椭球我们可以发现:只有绕着最小和最大的主转动惯量的主轴方向的转动才是稳定的。 参考资料 维基百科编者. 刚体[G/OL]. 维基百科, 202020200624. https://zh.wikipedia.org/w/index.php?title=刚体&oldid=60262018. 王达,南京大学,理论力学讲义 lecture12 |
【本文地址】
今日新闻 |
推荐新闻 |