GPU 渲染管线与着色器 大白话总结 |
您所在的位置:网站首页 › 现代gpu渲染管线设置多少 › GPU 渲染管线与着色器 大白话总结 |
GPU 渲染管线与着色器 大白话总结
|
码字不易,不求打赏,不求打脸,只求转载注明出处: https://blog.csdn.net/newchenxf/article/details/119803489 GPU 渲染管线与着色器 大白话总结 ---- 一篇就够 1 前言2 渲染管线2.1 CPU和GPU是如何并行工作的? 3 CPU处理 ---- 应用阶段3.1 把数据加载到显存3.1.1 加载模型数据例子3.1.2 加载纹理的例子 3.2 设置渲染状态3.3 调用Draw Call3.4 小结 4 GPU处理 ----几何阶段4.1 顶点数据是什么4.2 顶点着色器4.3 坐标空间4.3.1 模型空间4.3.2 世界空间4.3.3 观察空间4.3.4 裁减空间4.3.5 屏幕空间 4.4 顶点坐标变换总结4.5 视频播放的顶点数据回顾 5 GPU处理 ---- 光栅化阶段5.1 三角形设置与遍历5.2 片元着色器5.3 逐片元操作5.3.1 模板测试5.3.2 深度测试5.3.3 混合Blending5.3.4 图像输出-双缓冲 6 性能讨论6.1 性能瓶颈在哪里6.2 性能如何优化6.2.1 Unity静态批处理6.2.2 Unity动态批处理 7 附录知识7.1 什么是齐次坐标7.2 平移矩阵7.3 缩放矩阵7.4 旋转矩阵7.5 组合变换 参考 1 前言做图形图像,就要懂GPU; 要懂GPU,最重要是懂渲染管线(或者叫流水线); 而渲染管线,最重要的环节就是shader,即着色器。 所以本文尝试总结GPU的渲染流程和shader,可作为图像开发的入门教程。 2 渲染管线管线,又称流水线。 什么是流水线呢? 流水线是指在重复执行一项任务时,把它细分成很多小任务,让这些小任务重叠执行,来提高整体的运行效率。 举个栗子: 卸货搬运工,3个人从车上搬到店里。3个人分别是A, B, C。 A给B,B给C,C到店里。 A不需要等C放到店里,再开始下一次的搬运,而是C在搬的过程中,就可以开始搬第二个货物了。 CPU的处理,其实也是用流水线技术,它把一条指令的执行,拆分成五个部分:取指令、解码、取数据,运算和写结果。然后流程跟上面的搬运工差不多。 而渲染管线,就是根据一个三维场景中的顶点、纹理等信息,转换成一张二维图像。这个工作由CPU + GPU 共同完成。 通常把一个渲染流程分3个阶段: (1) 应用阶段 (2) 几何阶段 (3) 光栅化阶段 应用阶段由CPU完成,几何阶段 和 光栅化阶段 由GPU完成。 当然了,既然是流水线,意味着3个阶段的执行是异步的。也就是,CPU执行完了,不需要GPU执行完才开始下一次调用。 另外,GPU执行的几何阶段和光栅化阶段,也细分了子任务,也是使用流水线的技术。 2.1 CPU和GPU是如何并行工作的?答案就是命令缓冲区。命令缓冲区包含了一个命令队列。CPU添加命令,GPU读取命令。 当CPU需要渲染一些对象时,就向命令缓冲区添加命令;当CPU完成一次渲染任务后,可以从缓冲区继续取出命令并执行。 橙色的【改变渲染状态】,就是加载数据,改变着色器,切换纹理啥的,举个openGL的例子: GLES20.glUseProgram(program); GLES20.glBindTexture(GLES20.GL_TEXTURE_2D, textureId);一帧图像的生成,如果有多个物体模型,就挨个提交DrawCall。GPU挨个绘制到颜色缓冲区,然后混合,注意,虽然说是GPU挨个处理DrawCall,但是GPU内部也是流水线,不需要等A绘制完了才绘制B,A只要完成了第一小步,进入第二步,B就可以开始第一步了,这第一步就是下面会说的顶点着色器。 绘制一帧完成后,调用swapBuffer,把在颜色缓冲区的数据,提交到屏幕显示。 3 CPU处理 ---- 应用阶段主要工作: (1) 把数据加载到显存(GPU的内存) (2) 设置渲染状态 (3) 调用Draw Call 3.1 把数据加载到显存GPU一般不能直接访问内存,所以自己就搞了个内存,叫显存(显卡内存)。CPU把一些渲染所需数据从硬盘或网络加载到内存,然后送到显存。 数据最主要就两个,模型数据(顶点坐标+纹理坐标)和纹理图像。其他的数据量都很小,如法线方向。加载到显存后,在CPU的内存中的数据,可以删除,例如用bitmap生成一个纹理,加载到GPU后就可以回收了。 3.1.1 加载模型数据例子下面用一个android视频播放渲染的例子,来说明如何加载模型数据。 视频是在一个二维的矩形框内显示,所以只需要4个顶点坐标,以及对应的4个纹理坐标。纹理用的是视频解码后的图像。 //顶点数据 private float[] vertexData = { -1f, -1f, 1f, -1f, -1f, 1f, 1f, 1f }; //纹理坐标数据 private float[] fragmentData = { 0f, 0f, 1f, 0, 0f, 1f, 1f, 1f }; public void onCreate() { //顶点坐标数据在JVM的内存,复制到系统内存 vertexBuffer = ByteBuffer.allocateDirect(vertexData.length * 4) .order(ByteOrder.nativeOrder()) .asFloatBuffer() .put(vertexData); vertexBuffer.position(0); //纹理坐标数据在JVM的内存,复制到系统内存 fragmentBuffer = ByteBuffer.allocateDirect(fragmentData.length * 4) .order(ByteOrder.nativeOrder()) .asFloatBuffer() .put(fragmentData); //VBO全名顶点缓冲对象(Vertex Buffer Object),他主要的作用就是可以一次性的发送一大批顶点数据到显卡上 int [] vbos = new int[1]; GLES20.glGenBuffers(1, vbos, 0); vboId = vbos[0]; //下面四句代码,把内存的数据复制到显存中 GLES20.glBindBuffer(GLES20.GL_ARRAY_BUFFER, vboId); GLES20.glBufferData(GLES20.GL_ARRAY_BUFFER, vertexData.length * 4 + fragmentData.length * 4, null, GLES20. GL_STATIC_DRAW); GLES20.glBufferSubData(GLES20.GL_ARRAY_BUFFER, 0, vertexData.length * 4, vertexBuffer); GLES20.glBufferSubData(GLES20.GL_ARRAY_BUFFER, vertexData.length * 4, fragmentData.length * 4, fragmentBuffer); }代码中已经加了注释,不过这里还是可以再说明一下。 vertexData 毕竟是java定义的变量,使用的JAVA虚拟机的内存,而不是系统内存,没办法直接给GPU的。所以,先用ByteBuffer,把vertexData拷贝到系统内存。 接着,创建一个顶点缓冲对象(Vertex Buffer Object),他主要的作用就是可以一次性的发送一大批顶点数据到显卡上。然后,调用glBufferData,把数据拷贝到显卡内存上!这样后面GPU开始工作时,就可以快速访问了。 3.1.2 加载纹理的例子这里再贴一个android app加载纹理图像的例子: public static int createTexture(Bitmap bitmap){ int[] texture=new int[1]; //生成纹理 GLES20.glGenTextures(1,texture,0); //生成纹理 GLES20.glBindTexture(GLES20.GL_TEXTURE_2D,texture[0]); //设置缩小过滤为使用纹理中坐标最接近的一个像素的颜色作为需要绘制的像素颜色 GLES20.glTexParameterf(GLES20.GL_TEXTURE_2D, GLES20.GL_TEXTURE_MIN_FILTER,GLES20.GL_NEAREST); //设置放大过滤为使用纹理中坐标最接近的若干个颜色,通过加权平均算法得到需要绘制的像素颜色 GLES20.glTexParameterf(GLES20.GL_TEXTURE_2D,GLES20.GL_TEXTURE_MAG_FILTER,GLES20.GL_LINEAR); //设置环绕方向S,截取纹理坐标到[1/2n,1-1/2n]。将导致永远不会与border融合 GLES20.glTexParameterf(GLES20.GL_TEXTURE_2D, GLES20.GL_TEXTURE_WRAP_S,GLES20.GL_CLAMP_TO_EDGE); //设置环绕方向T,截取纹理坐标到[1/2n,1-1/2n]。将导致永远不会与border融合 GLES20.glTexParameterf(GLES20.GL_TEXTURE_2D, GLES20.GL_TEXTURE_WRAP_T,GLES20.GL_CLAMP_TO_EDGE); if(bitmap!=null&&!bitmap.isRecycled()){ //根据以上指定的参数,生成一个2D纹理,上传到GPU GLUtils.texImage2D(GLES20.GL_TEXTURE_2D, 0, bitmap, 0); } return texture[0]; }先用glGenTextures生成一个纹理id。这时候,还没有创建实际数据。 接着,设置一下纹理的属性,然后,调用texImage2D,这会先创建一个纹理buffer,然后把bitmap拷贝到buffer上。然后完事。上面的函数结束后,bitmap的内容就拷贝到GPU了,可以根据需要回收。 需要强调的是,不管是加载顶点还是纹理,都只需要在初始化时,一次性完成,不需要每次onDraw都加载,否则就没有意义了。 3.2 设置渲染状态即声明场景的网格(模型)如何被渲染,比如用哪个vertex shader/fragment shader,光源属性,材质(纹理)等。如果绘制不同的网格时没有切换渲染状态,那么前后的网格,将使用同一种渲染状态。 3.3 调用Draw Call前面已经提到了DrawCall,可能你已经明白了,其实就是一个命令,发起方是CPU,接收方是GPU。 当一个Draw Call调用时,GPU就会根据渲染状态(材质,纹理,着色器)和所有的顶点数据进行计算,GPU流水线开始运转。 再次强调, 3.4 小结第一步只需要1次加载就够了,不用每次绘制都加载。 第二和第三,需要每次onDraw时设置。 这里也用绘制视频或图片的onDraw函数,来举个栗子: public void onDraw(int textureId) { GLES20.glClear(GLES20.GL_COLOR_BUFFER_BIT); GLES20.glClearColor(1f,0f, 0f, 1f); //设置渲染状态: program根据具体的shader编译,这里就是指定用哪个shader GLES20.glUseProgram(program); //设置渲染状态:指定纹理 GLES20.glBindTexture(GLES20.GL_TEXTURE_2D, textureId); //设置渲染状态:绑定VBO GLES20.glBindBuffer(GLES20.GL_ARRAY_BUFFER, vboId); //设置渲染状态:指定顶点坐标在VBO的从0开始,8个数据 GLES20.glEnableVertexAttribArray(vPosition); GLES20.glVertexAttribPointer(vPosition, 2, GLES20.GL_FLOAT, false, 8, 0); //设置渲染状态:指定顶点坐标在VBO的从8*4(float是4个字节)开始,8个数据 GLES20.glEnableVertexAttribArray(fPosition); GLES20.glVertexAttribPointer(fPosition, 2, GLES20.GL_FLOAT, false, 8, vertexData.length * 4); //调用Draw Call, GPU 管线开始工作 GLES20.glDrawArrays(GLES20.GL_TRIANGLE_STRIP, 0, 4); //绘制完成,恢复现场 GLES20.glBindTexture(GLES20.GL_TEXTURE_2D, 0); GLES20.glBindBuffer(GLES20.GL_ARRAY_BUFFER, 0); } 4 GPU处理 ----几何阶段可以把几何阶段和光栅化阶段放在一起,画一张图。 当然了,上图可能不全,中间可能还有些可选的步骤,我只是把最重要的列出来。 其中,蓝色部分的顶点着色器,和片元着色器,是开发者完全可自定义编程的,也是大部分图像开发同学需要关心的2个步骤。 4.1 顶点数据是什么先来个基本说明:GPU认识的数据,只有点,线,三角形。 这对应1个顶点,2个顶点,3个顶点。这三个又称为图元。点和线一般在2D场景使用,在3D场景,基本是由N多个三角形,来拼接成一个物体模型。 下图是一个人物模型的例子: 一个模型文件,一般会包含顶点坐标,纹理坐标,纹理本身(纹理可以有多张)等。举个栗子,打开3D max的obj后缀的模型文件,就可以看到如下文本内容:
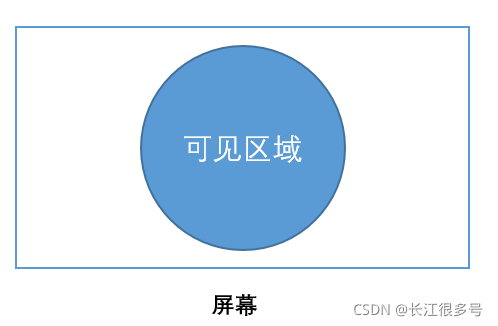
顶点着色器是GPU内部流水线的第一步。 它的处理单位是顶点,也就是每个顶点,都会调用一次顶点着色器。 它的主要工作:坐标转换和逐顶点光照,以及准备后续阶段(如片元着色器)的数据。 坐标转换,即把顶点坐标从模型坐标空间转换到齐次裁切坐标空间。 这里给一个Unity的shader代码,Unity把顶点着色器和片元着色器的代码,放到了一个文件中,不过Unity引擎会解析文件,转换2个着色器代码段,传递给GPU。 Shader "Unlit/SimpleUnlitTexturedShader" { Properties { // 我们已删除对纹理平铺/偏移的支持, // 因此请让它们不要显示在材质检视面板中 [NoScaleOffset] _MainTex ("Texture", 2D) = "white" {} } SubShader { Pass { CGPROGRAM // 使用 "vert" 函数作为顶点着色器 #pragma vertex vert // 使用 "frag" 函数作为像素(片元)着色器 #pragma fragment frag // 顶点着色器输入 struct appdata { float4 vertex : POSITION; // 顶点位置 float2 uv : TEXCOORD0; // 纹理坐标 }; // 顶点着色器输出("顶点到片元") struct v2f { float2 uv : TEXCOORD0; // 纹理坐标 float4 vertex : SV_POSITION; // 裁剪空间位置 }; // 顶点着色器 v2f vert (appdata v) { v2f o; // 将位置转换为裁剪空间 //(乘以模型*视图*投影矩阵) o.vertex = mul(UNITY_MATRIX_MVP, v.vertex); // 仅传递纹理坐标 o.uv = v.uv; return o; } // 我们将进行采样的纹理 sampler2D _MainTex; // 像素着色器;返回低精度("fixed4" 类型) // 颜色("SV_Target" 语义) fixed4 frag (v2f i) : SV_Target { // 对纹理进行采样并将其返回 fixed4 col = tex2D(_MainTex, i.uv); return col; } ENDCG } } }代码已经加了清晰的注释。 appdata就是顶点着色器的输入,包括顶点坐标和纹理坐标。 通常,顶点着色器只处理顶点坐标,进行空间转换。 纹理坐标,一般透传给片元着色器。 vert函数就是顶点着色器的代码。Unity引擎会翻译成类似如下的,带有main函数的GLSL代码,然后去编译: attribute vec4 v_Position; attribute vec4 f_Position; uniform mat4 uMVPMatrix; varying vec2 textureCoordinate; void main() { gl_Position = uMVPMatrix* v_Position; textureCoordinate = f_Position.xy; }空间转换代码竟然及其简单,就是坐标乘于一个MVP矩阵! 接下来,我们就基于MVP矩阵,来展开说一下空间转换的概念。 在开始前,先强调一下,main函数会执行几次? 答案是,有几个顶点,就执行几次,且是并行的! 4.3 坐标空间什么是坐标空间呢?其实他在我们生活中处处存在。例如,你跟朋友约定在博物馆大门右转100米处见面,这时候,你说的位置,是一个以博物馆的大门为原点的空间。所以坐标空间,是一个相对的概念。 在游戏世界中也一样。 根据不同的参照物,可以分为模型空间-世界空间-观察空间-裁剪空间-屏幕空间。 在3D世界中,顶点坐标有3个数据,是(x, y, z),但为了方便做平移/旋转/缩放等转换,需要补充一个w分量。即(x, y, z, w),把这个4维的坐标,称为齐次坐标。这些知识,见第五节的附录知识。 接下来,我们来挨个讨论这些空间。 4.3.1 模型空间你在3D max制作了一个人物模型,该模型可以放到各种软件中适配。 对模型内部来说,有一个坐标原点,比如就在心脏处,那身体各个部位相对于心脏,就有一个坐标值; 每个模型对象,都有自己独立的坐标空间。所以也可以称为对象空间或局部空间。 4.3.2 世界空间可以把游戏中的一个地图,作为一个小小的世界,地图的中心,可以作为坐标原点。人物模型作为一个整体,放到地图中,就有了相对地图中心的一个坐标值。这就是世界空间。 把模型空间的坐标,转换到世界空间的坐标,可以通过矩阵运算得到。这个矩阵叫Model Matrix。 事实上,一个模型放到地图中,可能会先缩放,然后旋转或者平移。这3者都有对应的矩阵,具体见附录。 换言之,这个矩阵是由物体在地图中的缩放,旋转,平移参数决定的。 换算的目的,就是得到物体的某个顶点,在地图中是个什么具体位置。 4.3.3 观察空间也可以称为摄像机空间。观察空间指的是,游戏地图那么大,我们只能看到一部分内容。于是在游戏地图中,定义一个Camera,它也处于世界空间中。camera就相当于我们的眼睛,camera照到哪里,哪里就是我们看到的画面。 在3D游戏中,经常就把Camera和用户角色绑在一起。角色对象走到哪,Camera对象就移动到哪,效果便是,走到哪,就看到哪里的风景! 所以地图中的任何物体,如果把Camera作为坐标原点,也有一个相对于Camera的坐标值。以Camera为原点的空间,就是观察空间了。 把世界空间的坐标,换算到观察空间,也可以通过矩阵运算得到。这个矩阵叫View Matrix。 这个矩阵依赖什么参数呢? 首先,摄像机本身也位于世界坐标系中,如果不考虑摄像机往哪里看,那其实就是很简单的平移矩阵。 即,摄像机A坐标如果是(-3, 0, 0), 那摄像机就是从世界原点O平移(-3, 0, 0)的结果。如果把摄像机的坐标作为新的原点,那原来的世界原点O,相当于从摄像机平移(3, 0, 0)的结果。所以两个坐标系的转换矩阵,近乎是一个平移矩阵。 当然了,实际摄像机还有朝向,以及眼睛是正面看,还是倒立看。不知道啥是倒立看?看下图 所以这个矩阵总用有三个因素影响。 来,一个函数解决烦恼,忘记复杂的计算过程。 glm::mat4 CameraMatrix = glm::LookAt( cameraPosition, // the position of your camera, in world space cameraTarget, // where you want to look at, in world space upVector // probably glm::vec3(0,1,0), but (0,-1,0) would make you looking upside-down, which can be great too ); 4.3.4 裁减空间裁减空间就是摄像机能看到的区域。这个区域成为视椎体。 它由6个平面组成,这些平面也成为裁减平面。视椎体有两种类型,涉及两种投影方式。一个是透视投影,一个是正交投影。 完全位于这块空间的图元,会被保留; 完全位于空间之外的图元,完全丢弃; 和空间边界相交的图元,会被裁减。 下图是一个透视投影的示意图。人物完全在视椎体内,所以右下角的小图,是最终用户看到的2D画面样子。 那么,如何判断一个东西就在视椎体内呢? 答案是通过一个投影矩阵,把顶点转换到一个裁减空间。 这个矩阵,基本上由摄像机的参数决定。 参数示意图如下: FOV代表视角的度数(Field of View); Near和Far是摄像机原点,距离裁切面的距离; AspectRatio是裁切面的宽高比; 从观察空间到裁减空间的变化矩阵,咱成为Projection Matrix。 矩阵可以用一个函数来生成: // Generates a really hard-to-read matrix, but a normal, standard 4x4 matrix nonetheless glm::mat4 projectionMatrix = glm::perspective( glm::radians(FoV), // The vertical Field of View, in radians: the amount of "zoom". Think "camera lens". Usually between 90° (extra wide) and 30° (quite zoomed in) AspectRatio, // Aspect Ratio. Depends on the size of your window. such as 4/3 == 800/600 == 1280/960, sounds familiar Near, // Near clipping plane. Keep as big as possible, or you'll get precision issues. Far // Far clipping plane. Keep as little as possible. );具体公式生成原理,这里就不展开了,详情自行google或者看这里:https://zhuanlan.zhihu.com/p/104768669。 投影矩阵虽然有投影两个字,但是没有做真正的投影。而是在做投影的准备工作。 投影要到下一步,到屏幕空间的转换,才使用。 进行投影矩阵运算后,或者说,到了裁剪空间后,w值就不一定是0和1了,有特殊的含义。具体而言,如果一个顶点在视椎体内,那么它变换后的坐标,必须满足: -w -1f, -1f, 0f, 1f, 1f, -1f, 0f, 1f, -1f, 1f, 0f, 1f, 1f, 1f, 0f, 1f, };所以,这里的顶点坐标,和裁减空间下的值是一样的。 换句话说,视频播放不用关心什么世界空间,观察空间了,因为是二维的,没有这些空间,MVP矩阵就是一个单位矩阵。 另外,因为w值为1,所以NDC下的坐标,跟裁减空间是一样的。 4.3.5节,提到了NDC坐标,是一个三维的正方体。 如果不考虑z,那么NDC坐标,是一个二维的正方形。 二维的NDC,如下图所示: 说完了顶点,再说一下openGL纹理坐标系,纹理只有二维的,不敢是视频播放还是3D世界,都是二维。 坐标系定义如下: 回到3.1节,我们在加载顶点数据时,也包含了对应的纹理坐标: //纹理坐标数据 private float[] fragmentData = { 0f, 0f, 1f, 0, 0f, 1f, 1f, 1f };从数据可见,顶点坐标和纹理坐标有一一对应关系,比如顶点坐标左下角位置(-1,-1),对应纹理坐标左下角位置(0, 0)。 最后,来看一下3.1节对应的顶点着色器代码,也是简单到令人发指: attribute vec4 v_Position; attribute vec4 f_Position; varying vec2 textureCoordinate; void main() { gl_Position = v_Position; textureCoordinate = f_Position.xy; }注意,这个和4.2节不太一样,这一段已经是可以直接给openGL编译的shader,4.2节是unity封装的代码形式,最后Unity的引擎,也会翻译成类似上面的代码,有main函数。 v_Position是外部输入的顶点坐标,gl_Position是全局内建变量,代表最后在裁减空间下的坐标。 如果上面的shader非要使用到MVP矩阵,也是可以的,只不过,这个MVP是一个单位矩阵。乘于单位矩阵,还是一样的值。 即 gl_Position = mvpMatrix * v_Position; 5 GPU处理 ---- 光栅化阶段光栅化的主要任务:计算每个图元都覆盖了哪些像素,然后给这些像素着色。 5.1 三角形设置与遍历三角形设置: 这是光栅化流水线的第一个阶段。 这个阶段会计算光栅化一个三角网格所需的信息。 具体而言,上一个阶段输出的,都是在屏幕上的二维的三角网格的顶点。即我们得到的是三角网格每条边的两个端点。但如果要得到整个三角网格对像素的覆盖情况,我们就必须计算每条边上的像素坐标。为了能够计算边界像素的坐标信息,我们就需要得到三角形边界的表示方式。这样一个计算三角网格表示数据的过程就叫做三角形设置。它的输出是为了给下一个阶段做准备。 三角形遍历: 三角形遍阶段将会检查每个像素是否被一个三角网格所覆盖。如果被覆盖的话,就会生成一个片元,而这样一个找到哪些像素被三角网格覆盖的过程就是三角形遍历。三角形遍历阶段会根据上一个阶段的计算结果来判断一个三角网格覆盖了哪些像素,并使用三角网格3个顶点的顶点信息对整个覆盖区域的像素进行插值。下图展示了三角形遍历阶段的简化计算过程。 你一定想知道,绘制一帧,到底会产生多少片元? 可以这么说,如果仅仅简单的二维使用,比如视频播放,那三角形就4个顶点,铺在了屏幕的4个角落,没有任何深度,此时片元数量就是屏幕的宽*高,这应该很容易理解,如下图。 但如果是3D游戏,就不一定了。 绘制一帧,有多个模型需要绘制,每个模型可能都要调用一次Draw Call。一次Draw Call,可能就要产生一些片元。 所有物体都绘制的话,基本上所有屏幕像素坐标,都有网格覆盖到,且在某些像素坐标上,会有重叠的片元。 例如,石头的箭头区域像素,所对应的三角形网格,跟房子的三角形网格,都会计算出片元,两者的x, y一样,但是深度z不一样而已。 所以,3D游戏场景,片元数量 >= 屏幕宽 * 高 5.2 片元着色器片元着色器也是可以自定义的代码,主要是给片元上色。 先来一段用于视频播放渲染的着色器代码: varying highp vec2 textureCoordinate;// 片元对应的纹理坐标,又顶点着色器的varying变量会传递到这里 uniform sampler2D sTexture; // 外部传入的图片纹理 即代表整张图片的数据 void main() { gl_FragColor = texture2D(sTexture, textureCoordinate); // 从纹理中,找到坐标为textureCoordinate的颜色,赋值给gl_FragColor }是不是发现很简单?!就是根据纹理坐标,采样一下颜色,赋值给gl_FragColor就可以,作为该片元的最后颜色! 这意味着,最终颜色完全在你控制范围内,现在很多视频特效处理,就是在这个片元着色器上作文章。 举个栗子,我们想要对一个视频播放,看到的是黑白峰哥画面: #extension GL_OES_EGL_image_external : require precision mediump float; varying vec2 vCoordinate; uniform samplerExternalOES uTexture; void main() { vec4 color = texture2D(uTexture, vCoordinate); float gray = (color.r + color.g + color.b)/3.0; gl_FragColor = vec4(gray, gray, gray, 1.0); }把rgb做了一个简单的均值,然后最后的颜色,rgb分量一样(意味着是白色到黑色之间,gray为0黑色,gray为255,白色,gray为两者之间,灰色),就可以得到一个黑白的颜色。然后赋值给片元,一个简单的黑白滤镜就完成了。 需要强调的是,片元着色器也是并行执行的,有几个片元,就执行几个!GPU有非常强大的并行计算能力。 5.3 逐片元操作逐片元操作(PerFragment Operations)是openGL的说法,在DirectX中,成为输出合并混合阶段。 这个阶段的主要任务: (1) 做模板测试,深度测试等工作,来决定每个片元的可见性! (2)片元通过测试,把这个片元的颜色值和已经存储在颜色缓冲区的颜色,或者叫混合。 这个是可选的。模板数据放在模板缓冲(Stencil Buffer)。 模板啥意思呢?很简单,比如不管场景如何绘制,我只想看到屏幕的一个中间圆形区域,其他区域都不可见。 举个模板例子: 如果开启,会把该片元的深度值,即z值,和已经存在于深度缓冲区的深度值(如果有)进行比较。比较的方法,可以配置。默认是,大于等于时,舍弃片元,小于时,保留该片元。这也可以理解,深度越大,说明离Camera越远,被离Camera近的挡住了,所以没必要显示。 5.3.3 混合Blending如果通过了前面的测试,那就要进入混合阶段了。这个也是可配置的。 为什么要合并? 因为一帧图像生成,需要逐个绘制物体模型,每画一次,就会刷新一次颜色缓冲区。当我们执行某次渲染时,只要不是第一次,那颜色缓冲区就有上一次渲染物体的结果。 那么,对同样屏幕坐标的位置,是用上一次的颜色,还是这一次的颜色,还是混合在一起?这就是这个阶段要考虑的。 对半透明物体,需要开启混合功能,因为需要可以看见已经在颜色缓冲区的颜色,所以需要混合一下,才能体现出透明的效果。 对不透明的物体,开发者可以关闭混合功能,毕竟,只要通过了深度测试,一般说明要保留该片元,可以直接用该片元的颜色,覆盖掉颜色缓冲区的颜色。 5.3.4 图像输出-双缓冲首先,屏幕显示的,就是颜色缓冲区的数据。 在绘制一帧图像的过程中,颜色缓冲区正在不停的被覆盖,混合中。这个过程,肯定不能让用户看到。所以,GPU会使用双缓冲策略来接问题。 FrontBuffer绘制好了,交给屏幕显示,然后把BackBuffer空闲出来,下一次的渲染,就用BackBuffer。 画个图就清晰了。 先说结论:一般在CPU阶段,提交命令的耗时。Draw Call数量越多,越可能造成性能问题。 在每次调用Draw Call之前,CPU都要向GPU发送很多内容,比如数据,状态,命令等。CPU完成了准备工作,提交了命令,GPU才可以开始工作。GPU渲染能力很强,渲染100个三角形网格和10000个三角形网格,区别不大。所以,GPU渲染速度往往优于CPU提交命令的速度。很多时候,都是GPU处理完了命令缓冲区,空闲等待,CPU还在卖力准备数据中! 这好比像,我们有很多txt文件,比如1000个,如果1000个拷贝到另一个文件夹,就很慢。如果把它打包正一个tar包,哪怕不压缩,一次拷贝到另一个文件夹,那也比较快。 为啥呢?因为cpy本身很快,耗时主要在每次cpy之前,还要分配内存,创建元数据,文件上下文啥的! 如果地图中有N个物体模型,渲染一帧完整图像,可能就要调用N次Draw Call,而每一次的调用,CPU都需要做很多前置工作(改变渲染状态),那么CPU必然不堪重负。所以需要有针对性的性能优化。 6.2 性能如何优化我们先来看看Draw Call对CPU的消耗大概是一个什么级别的量: NVIDIA 在 GDC 曾提出,25K batchs/sec 会吃满 1GHz 的 CPU,100%的使用率。 公式: DrawCall_Num = 25K * CPU_Frame * CPU_Percentage / FPS DrawCall_Num : DrawCall数量(最大支持) CPU_Frame : CPU 工作频率(GHZ单位) CPU_Percentage:CPU 分配在drawcall这件事情上的时间率 (百分比) FPS:希望的游戏帧率 比如说我们使用一个高通820,工作频率在2GHz上,分配10%的CPU时间给drawcall上,并且我们要求60帧,那么一帧最多能有83个drawcall(25000210%/60 = 83.33), 如果分配是20%的CPU时间,那就是大概167。 所以对drawcall的优化,主要就是为了尽量解放CPU在调用图形接口上的开销。针对drawcall我们主要的思路就是每个物体尽量减少渲染次数,多个物体最好一起渲染,或者叫,批处理(batching)。 什么样的物体可以批处理呢? 答案是使用同一种材质的物体。 同一个材质的物理,意味着,只有顶点数据不一样,但是使用的纹理,顶点着色器,片元着色器的代码,都一样! 所以我们可以把这些物体的顶点数据合并成一个,再发给GPU,再调用一次DrawCall。 Unity引擎支持两种批处理方式:静态批处理 和动态批处理。其他游戏引擎的处理方式,不再这里赘述。 6.2.1 Unity静态批处理静态批处理,不限制模型的顶点数量,它只在运行开始阶段,它只在运动开始阶段,合并一次模型。这要求这些物理不能被移动! 优点是,合并制作一次,后面渲染不用合并,节约性能。 缺点是,可能占用较多内存。比如,没用静态处理,一些物体共享了网格,比如地图有100个树木,共享一个模型。如果把这些变成静态批处理,需要100倍的顶点数据内存。 6.2.2 Unity动态批处理动态批处理,则每一帧渲染,都需要合并一次模型网格。 优点是,这些物体可以被移动。 缺点是,因为每次要合并,需要有一些限制,比如,顶点数目不能超过300(不同Unity版本不一样)。 7 附录知识 7.1 什么是齐次坐标齐次坐标就是用N+1维来代表N维坐标。 例如笛卡尔坐标系的坐标(x, y, z),用(x, y, z, w)来表示。坐标可以是点,或向量。 目的: 区分向量或者点。辅助 平移T、旋转R、缩放S这3个最常见的仿射变换引经据典: 齐次坐标表示是计算机图形学的重要手段之一,它既能够用来明确区分向量和点,同时也更易用于进行仿射几何变换。 —— F.S. Hill, JR 《计算机图形学 (OpenGL 版)》作者 关于区分向量和点,指的是: (1) 从普通坐标转换成齐次坐标时 如果(x,y,z)是个点,则变为(x,y,z,1); 如果(x,y,z)是个向量,则变为(x,y,z,0) (2) 从齐次坐标转换成普通坐标时 如果是(x,y,z,1),则知道它是个点,变成(x,y,z); 如果是(x,y,z,0),则知道它是个向量,仍然变成(x,y,z) 关于平移,旋转,缩放,且慢慢道来。 7.2 平移矩阵平移矩阵是最简单的变换矩阵。平移矩阵是这样的: 缩放也很简单 这个稍微复杂一些,沿着X, Y, Z轴的旋转不一样,不过最后还是一个矩阵。这里不再单独展开。有兴趣可以参考: 7.5 组合变换上面介绍了旋转、平移和缩放的运算方法。把这些矩阵相乘就能将它们组合起来,例如: TransformedVector = TranslationMatrix * RotationMatrix * ScaleMatrix * OriginalVector; 注意,是先执行缩放,接着旋转,最后才是平移。这就是矩阵乘法的工作方式,也是我们对3D模型放到地图中的常用操作方式。 3个矩阵相乘,还是一个矩阵,这就是组合变换的矩阵,所以最后也可以写成: TransformedVector = TRSMatrix * OriginalVector; 参考Android OpenGL ES 1.基础概念 计算机组成原理–GPU 计算机那些事(8)——图形图像渲染原理 opengl-tutorial Unity文档 光栅化阶段设置 关于Drawcall |
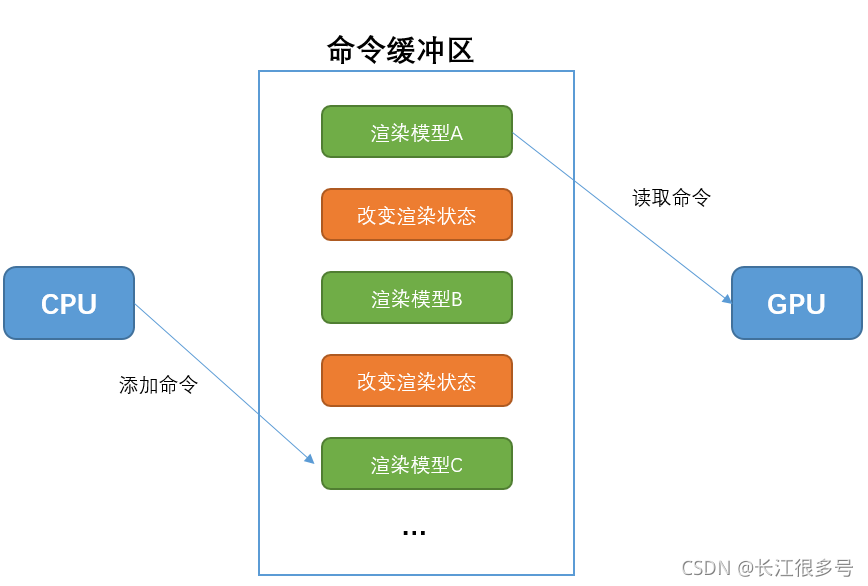 绿色的【渲染模型】,就是我们说的Draw Call。 举个一个openGL的例子:
绿色的【渲染模型】,就是我们说的Draw Call。 举个一个openGL的例子: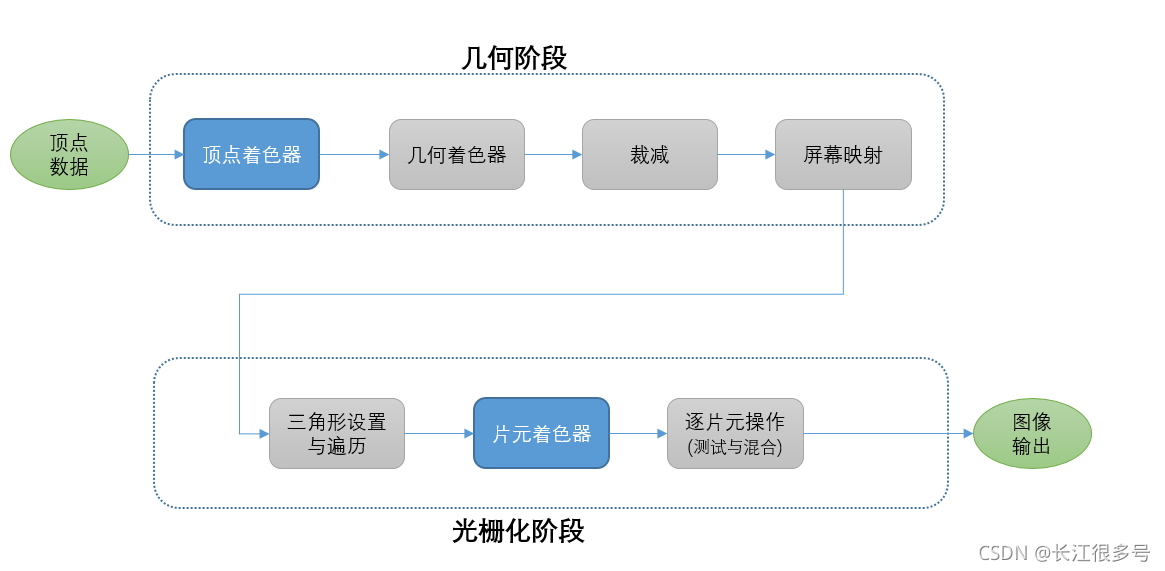
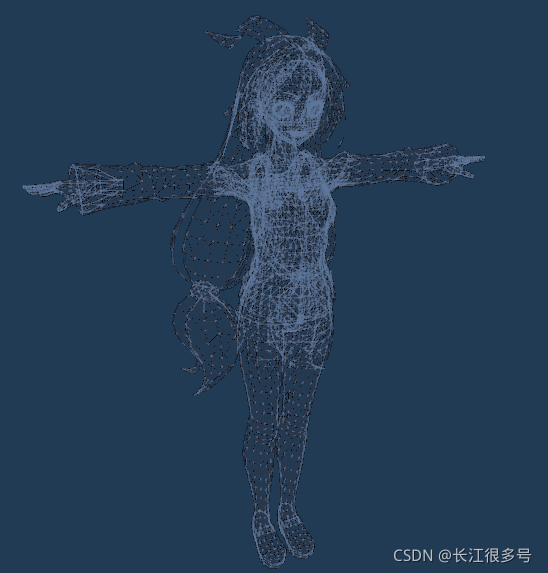 放大一些细节,发现都是三角形组合而成。而三角形的顶点,就是我们说的顶点坐标。
放大一些细节,发现都是三角形组合而成。而三角形的顶点,就是我们说的顶点坐标。 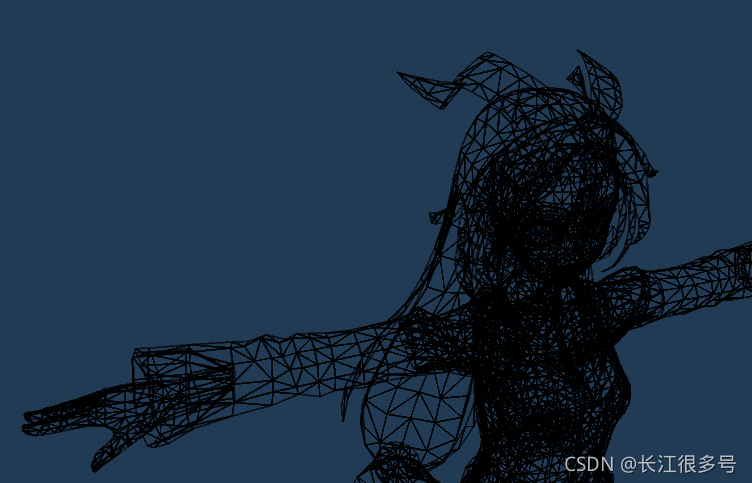 所有的三角形贴上二维图片纹理后,就是一个完整的图像:
所有的三角形贴上二维图片纹理后,就是一个完整的图像:  所以说,顶点数据,一般会包含顶点坐标 + 纹理坐标。
所以说,顶点数据,一般会包含顶点坐标 + 纹理坐标。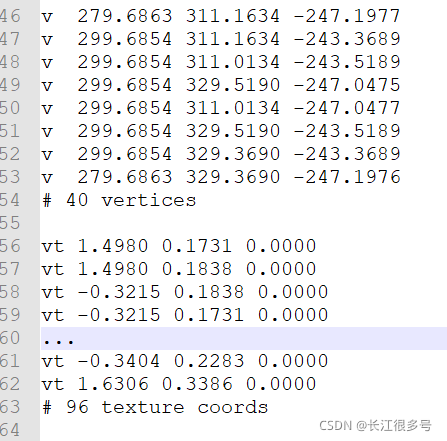

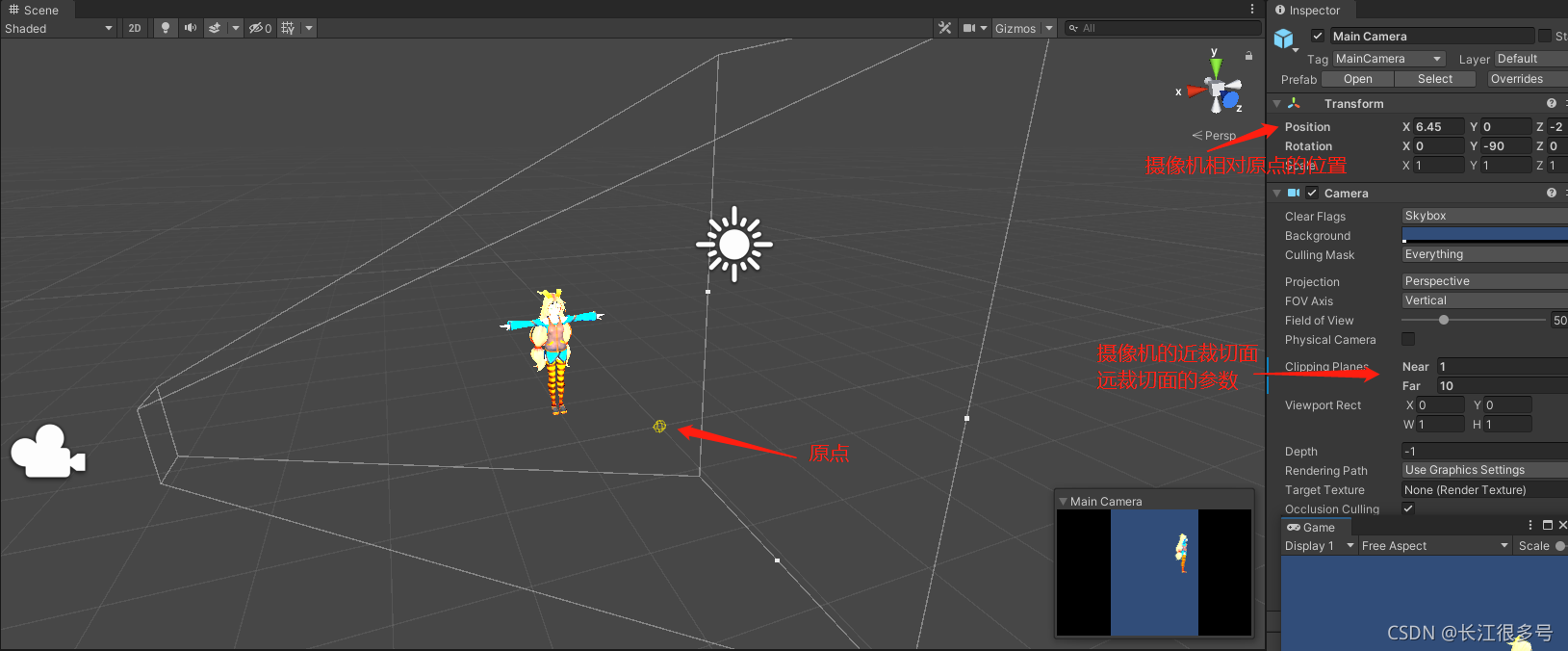 当然了,图中的Near 和Far,我是为了显示方便,设置了比较小的值。实际游戏中,Near和Far差别很大,比如Near = 0.1, Far = 1000。这跟人眼可看的范围是差不多的,近到贴眼睛的东西看不见,非常远的东西,也看不见。
当然了,图中的Near 和Far,我是为了显示方便,设置了比较小的值。实际游戏中,Near和Far差别很大,比如Near = 0.1, Far = 1000。这跟人眼可看的范围是差不多的,近到贴眼睛的东西看不见,非常远的东西,也看不见。
 视频播放的顶点坐标,都可以用上图作为参考。 即,顶点用于是4个,值,保证负一到一。
视频播放的顶点坐标,都可以用上图作为参考。 即,顶点用于是4个,值,保证负一到一。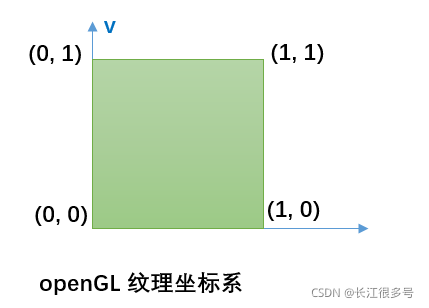
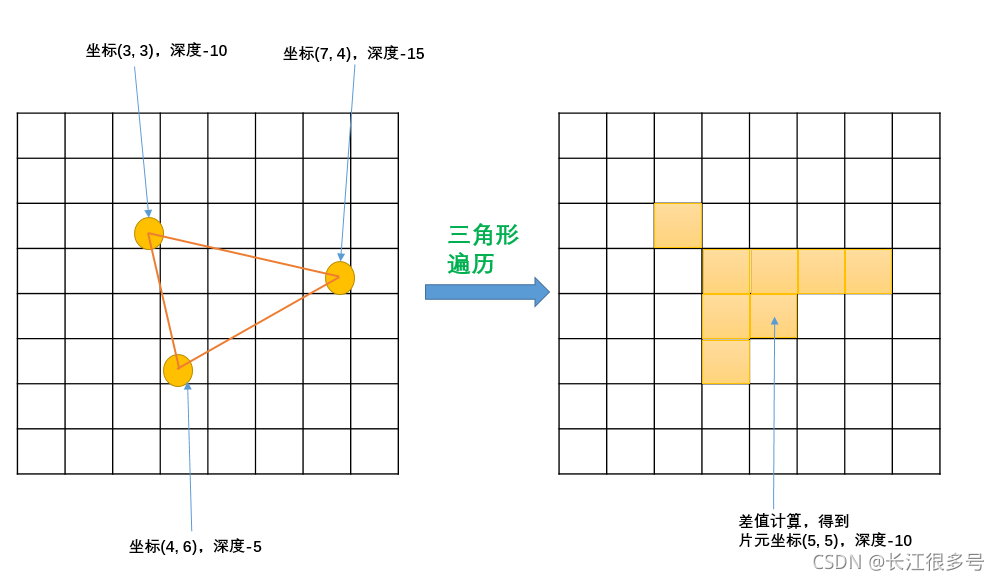 根据几何阶段输出的顶点信息,得到三角网格覆盖的像素位置。对应的像素会生成一个片元,片元中的状态,由三角形的顶点信息,进行差值计算得到。 像上图的三角网格,共产生了8个片元。
根据几何阶段输出的顶点信息,得到三角网格覆盖的像素位置。对应的像素会生成一个片元,片元中的状态,由三角形的顶点信息,进行差值计算得到。 像上图的三角网格,共产生了8个片元。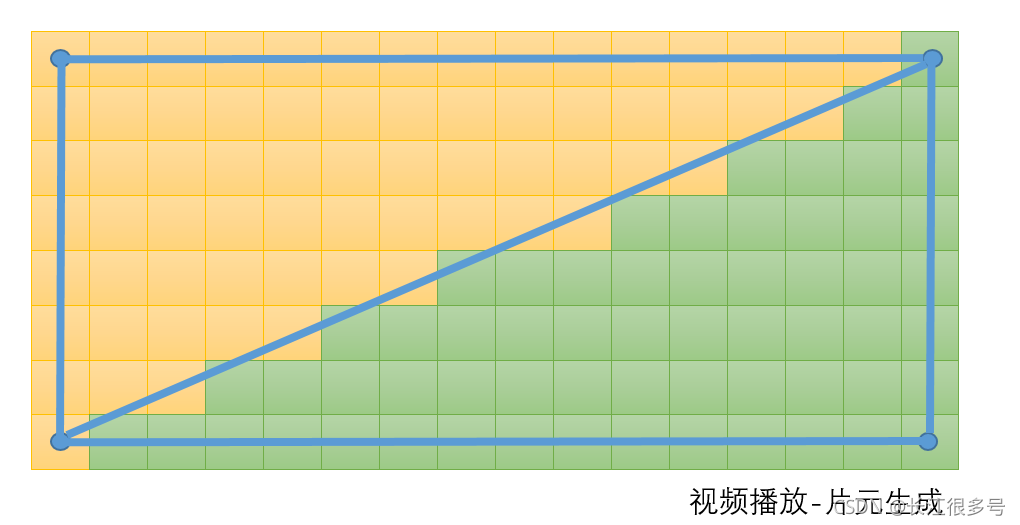 总共就2个三角形,深度都一样,也就是没有重叠的三角形,遍历
总共就2个三角形,深度都一样,也就是没有重叠的三角形,遍历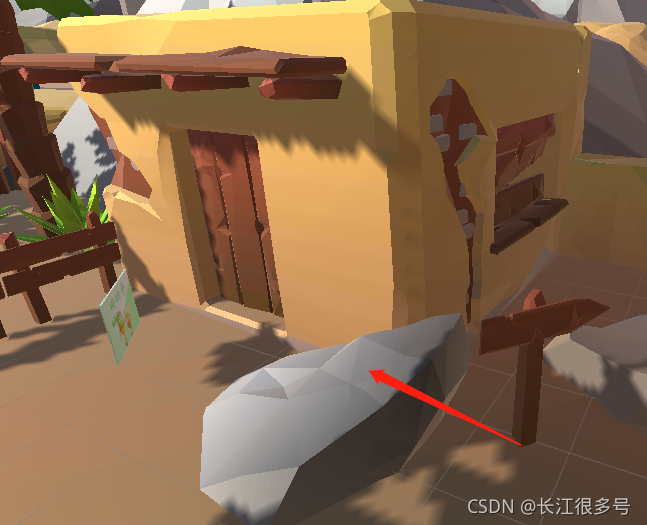 比如游戏中这种场景,有好几个物理模型,模型有重叠。比如石头后面有个房子。
比如游戏中这种场景,有好几个物理模型,模型有重叠。比如石头后面有个房子。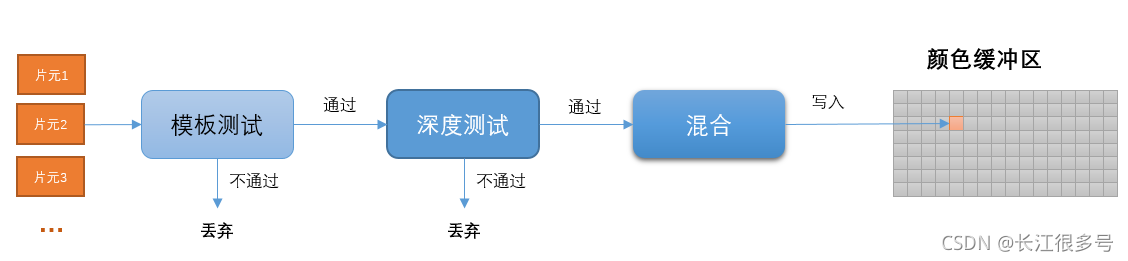
 片元的坐标如果在可见区域外,则直接丢弃。
片元的坐标如果在可见区域外,则直接丢弃。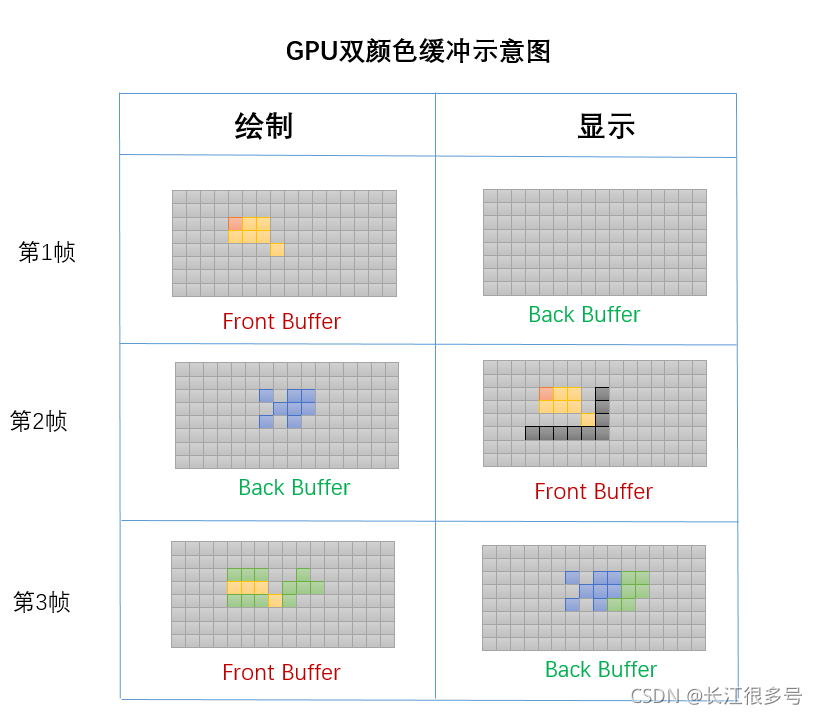 绘制完一帧图像,调用一下eglSwapBuffers,就可以切换缓冲区。
绘制完一帧图像,调用一下eglSwapBuffers,就可以切换缓冲区。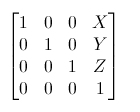 其中,X、Y、Z是点的位移增量。 例如,若想把向量(10, 10, 10, 1)沿X轴方向平移10个单位,可得:
其中,X、Y、Z是点的位移增量。 例如,若想把向量(10, 10, 10, 1)沿X轴方向平移10个单位,可得:  看到没,如果平移要用矩阵来运算,矩阵必须是4x4的,那点(10, 10, 10)只能增加一维w,才能被计算(矩阵乘法的要求,mn的矩阵,只能乘于nt 的矩阵)。
看到没,如果平移要用矩阵来运算,矩阵必须是4x4的,那点(10, 10, 10)只能增加一维w,才能被计算(矩阵乘法的要求,mn的矩阵,只能乘于nt 的矩阵)。 例如把一个向量(点或方向皆可)沿各方向放大2倍:
例如把一个向量(点或方向皆可)沿各方向放大2倍: 
【本文地址】
今日新闻 |
推荐新闻 |