TI的FMCW毫米波雷达培训笔记1:FMCW基本原理以及如何测量不同距离的物体的距离(雷达小白知识点整理) |
您所在的位置:网站首页 › 激光雷达波形表达式 › TI的FMCW毫米波雷达培训笔记1:FMCW基本原理以及如何测量不同距离的物体的距离(雷达小白知识点整理) |
TI的FMCW毫米波雷达培训笔记1:FMCW基本原理以及如何测量不同距离的物体的距离(雷达小白知识点整理)
|
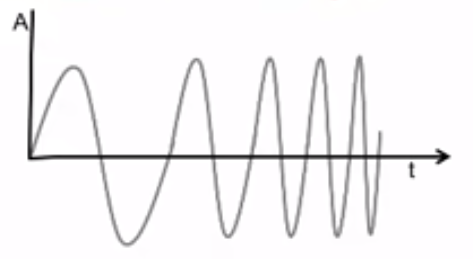
参考: 培训地址:https://training.ti.com/mmwave-training-series Indish翻译Chinese:https://www.bilibili.com/video/BV1tE411j7vT 一篇蛮不错的傅里叶变换通俗理解:https://blog.csdn.net/l494926429/article/details/51818012/ 一、一些基本概念FMCW(Frequency Modulated Continuous Wave):调频连续波,其核心是线性调频脉冲信号(chirp),即频率随时间增长的正弦波,A-t图如下:
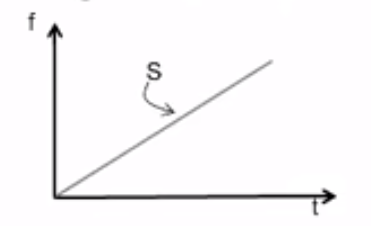
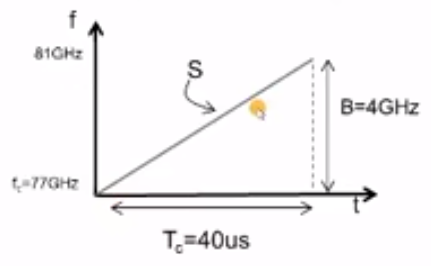
加速度与时间图像(a-t图像)有如下几个特点: 1、意义:反应了物体加速度随时间变化的规律。 2、如果图像平行于t轴,表示物体做匀变速直线运动;如果图像是曲线或倾斜的直线,表示物体做变加速度运动。 3、图像在第一象限,表示物体加速度方向为正方向;图像在第四象限,表示物体加速度方向为负方向。 4、图像与t轴围成的面积表示为物体速度变化量,面积在第一象限表示物体速度在正方向上的增加量,面积在第四象限表示物体速度在负方向上的增加量。 其中,这个正弦波的频率由小变大,假设以fc开始,到fc+B结束,那么B就是调频脉冲的带宽。这是一个线性过程,在频率-时间图中就是一条斜率为S的直线。 线性调频脉冲本质上是频率以线性方式进行调制的连续波,这就是FMCW名字的来源。 给上面的那个图加上一些数字,如下图:
该图就表示,以77GHz的频率开始跨越 4GHz带宽最终以81GHz结束的波,其中S决定了这个波频率的增长速度。其中,B和S是定义整个系统的最重要的两个参数。 二、一个雷达测量距离的工作机制
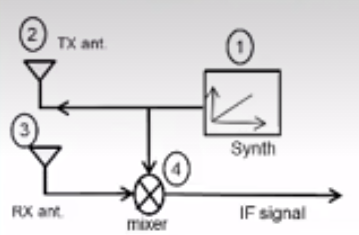
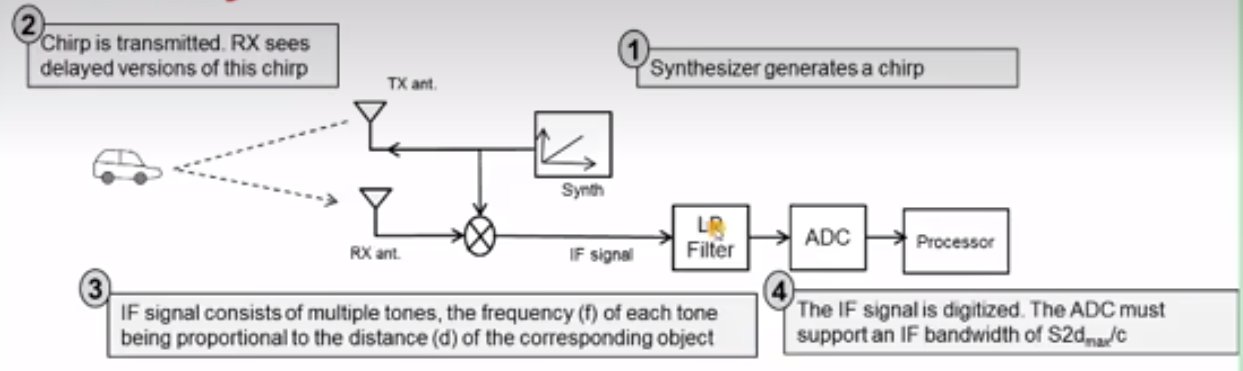
如上图,首先由一个生成器生成波,随后用一个发射天线(TX)发射出去,再用接收天线(RX)接受回来,将两个波都输入到一个mixer中,生成IF信号。 IF信号具有两个特性,即频率为输入信号之差,相位为输入信号之差。 即:x=sin[(w1 - w2)t +(φ1- φ2)]
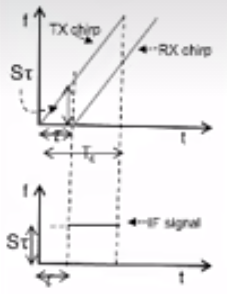
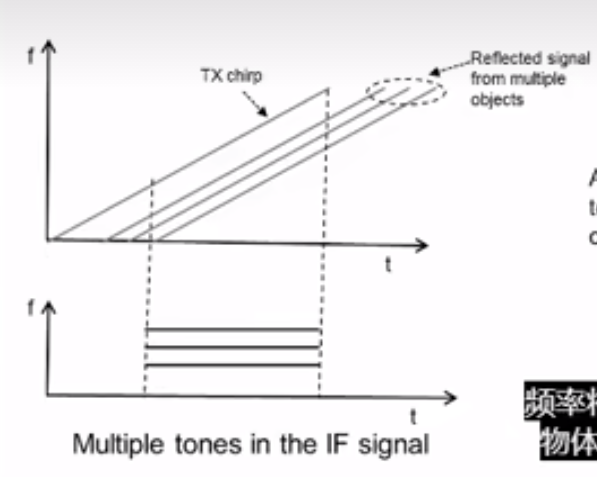
那对于TX和RX天线的波,可以表示在一个f-t图中,二者之差,即为IF signal,前面的τ即为接收延迟,即波一个来回的时间,那让这个时间乘以光速再除以2,就是物体距离雷达的距离d。那么,这个IF信号的频率就等于S2d/c,因为τ=2d/c。 需要注意的是,这个τ相对于整个时间段来说,可能非常小。 而对于多个物体而言,也是同样的,如下:
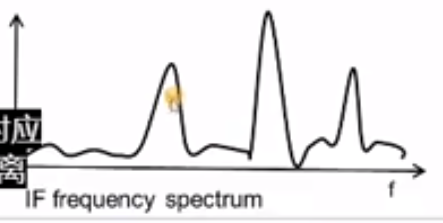
TX发出了一个波,RX接受了三个,但是三个波延迟不同,所以我能产生三个IF信号,而IF的频率与雷达与物体的距离成正比,因此最上面的就是最远的物体。此图画的有点问题,f-t函数的起点不应该相同,远距离的τ肯定要大于近距离的τ。 傅里叶变换能将IF信号转换成多个峰值,这些都代表不同物体,其中f越大(频率越大),对应的物体离雷达距离越远。
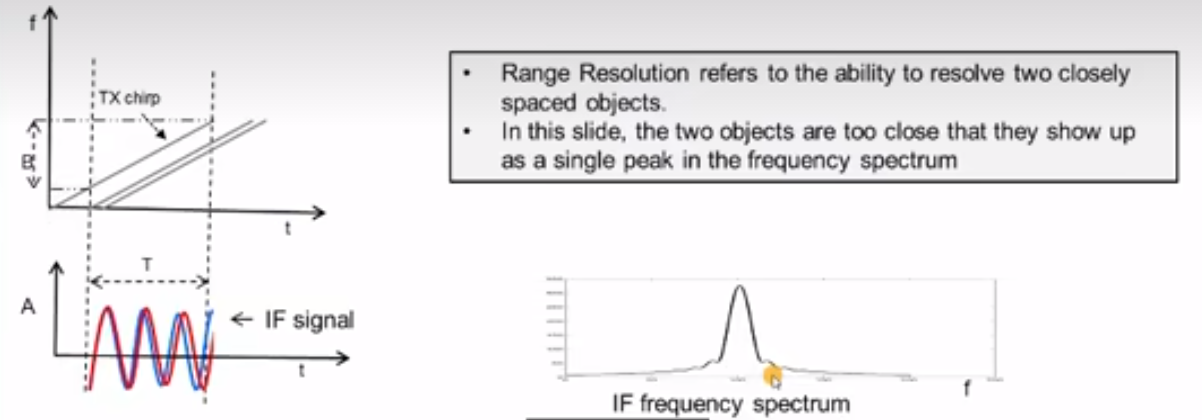
那么,如何分辨两个距离相近的物体呢?或者,雷达的距离分辨率是由什么决定的?
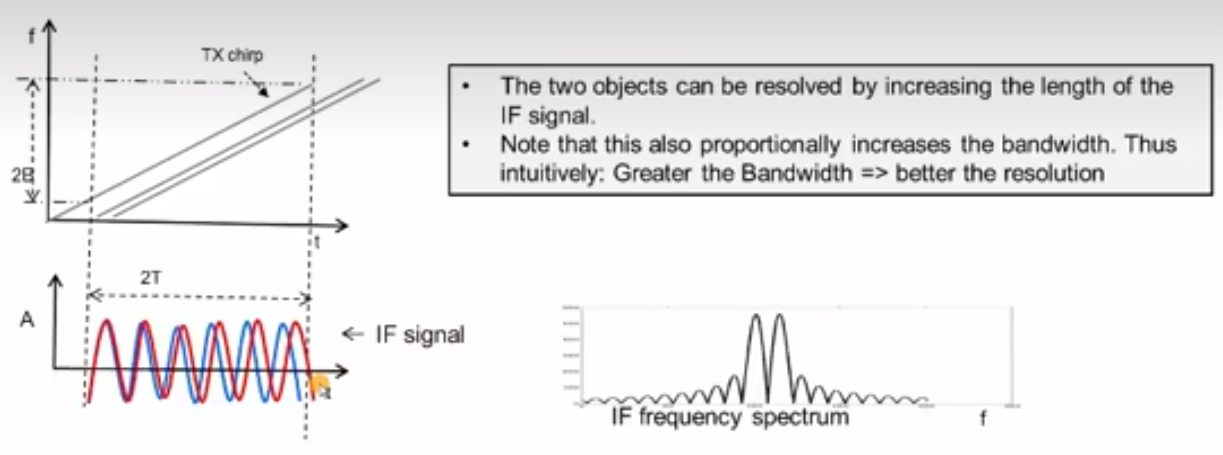
如上图,对于两个距离相近的物体来说,其形成的IF正弦波非常相近,做傅里叶变换后没有办法区分出两个波。比较直观的方案是增大带宽B,如下图:
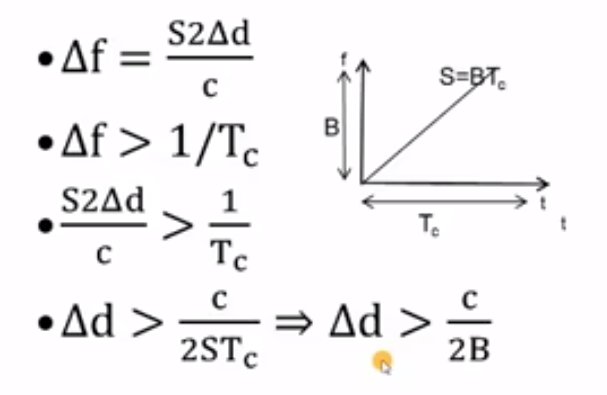
因此我们说,正常情况下,更大的带宽对应更好的距离分辨率。 用公式表示就是:二者的距离必须大于光速除以两倍的带宽。
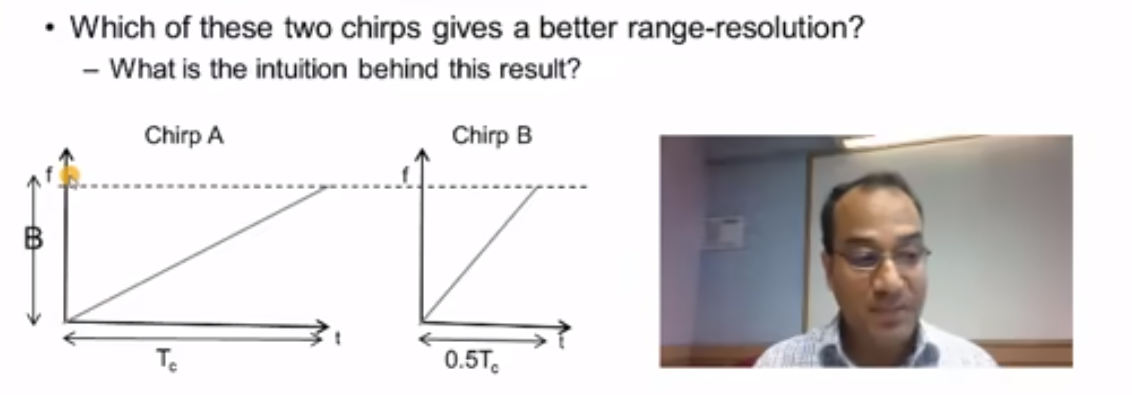
(这里这个第二行的不等式还不理解,慢慢来用到再说) 那么,对于下面的例子来说,具有相同带宽的两个chirp肯定具有相同的距离分辨率。但是A生成的IF信号窗口更大一些。
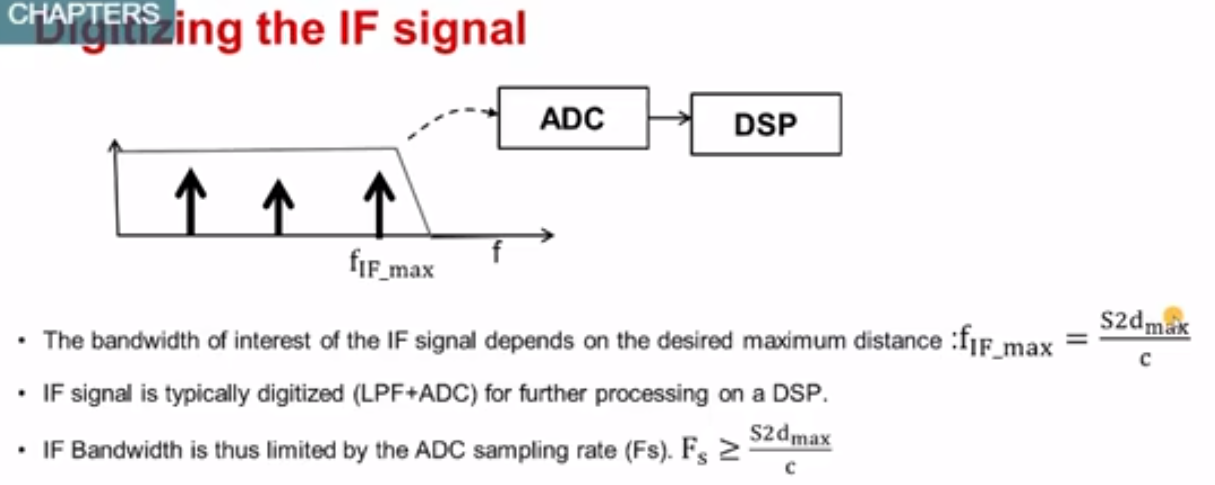
三、IF信号的数字化机制
在数字化之前,我们首先要明确我们到底有多大带宽,对哪段距离的物体感兴趣。 首先通过一层低通滤波,滤掉dmax以外的物体,我们不感兴趣,所以设置一个fIF_max;而ADC的采样率也应该高于此最高频率(如果采样率比频率低那将不可描述) 可以看到,带宽取决于斜率与最大距离乘积;如果ADC的采样率或者带宽B是任务雷达的瓶颈,那么我们可以平衡斜率S和最大距离dmax。现实中往往倾向于更大的dmax和更小的S。 对于第二章两个chirp例子A和B,就是折中的部分,即二者带宽相同,A的S更小,那么A就能够获取更大的dmax,相对来说,比起chirpB对带宽B的要求更加宽松;但是B的优势在于时间短,这就是需要考量折中的部分。
大致总结一下:
1、生成器生成一个chirp,交给TX天线; 2、TX把这个chirp发送出去,在物体返回过来之后,由RX天线接收; 3、对获取的两个chirp进行mix,得到IF Signal 4、通过低通滤波之后的IF Signal,可以被一个ADC数字化,然后输入到处理器中。 总之,今天主要讲的是FMCW如何检测物体距离以及区分不同距离的物体。后序更加有挑战性的工作,我们下篇再见~ 第二期:https://www.cnblogs.com/loveandninenine/p/16818575.html |
【本文地址】
今日新闻 |
推荐新闻 |