论文笔记:基于增强随机游动算法与双尺度焦点图的多焦点图像融合 |
您所在的位置:网站首页 › 测量尺度的优缺点 › 论文笔记:基于增强随机游动算法与双尺度焦点图的多焦点图像融合 |
论文笔记:基于增强随机游动算法与双尺度焦点图的多焦点图像融合
|
摘要
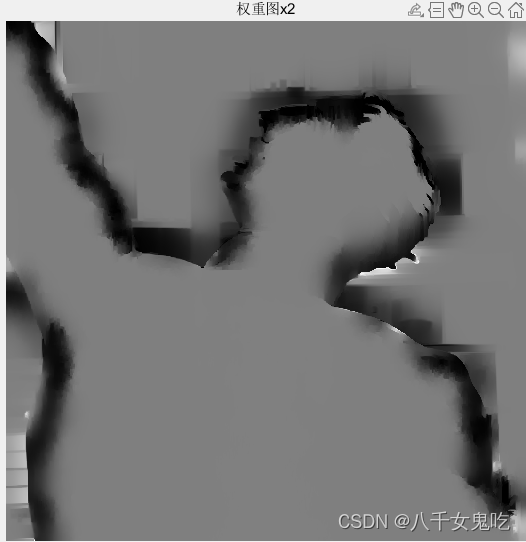
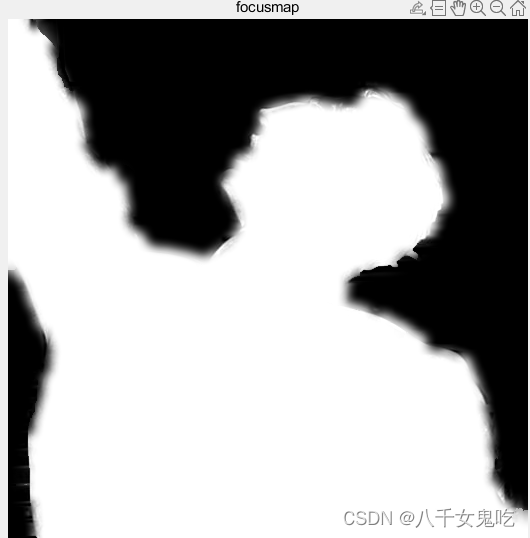
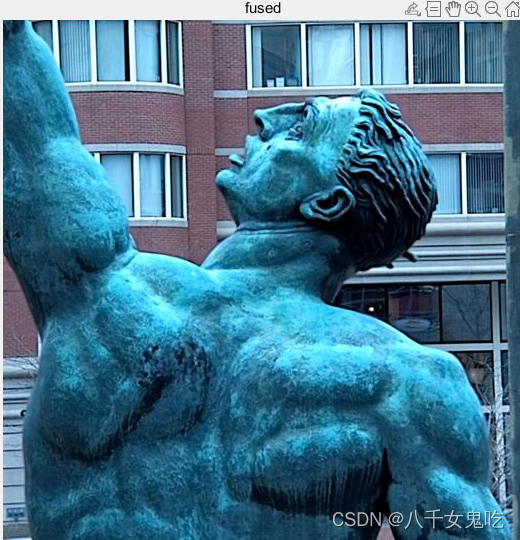
在多焦点图像的传统融合方法中,由焦点测量生成的焦点图通常对配准错误和噪声敏感,或者产生对齐不良的边界。虽然许多最先进的算法使用更复杂的策略或程序来解决这个问题,但在本文中,我们建议直接从获得使用小尺度和大尺度聚焦测量的两个尺度的不完美观测(聚焦图)中估计聚焦图。这将有助于通过利用两个尺度观察到的焦点图的互补特性,即对误配准(和噪声)的鲁棒性和更好对齐的边界,实现更稳健的融合。首先使用基于随机游动的算法从概率角度对估计进行建模,在该算法中,我们试图求解焦点图的每个像素与观测到的像素相关联的概率。然后我们发现,这种方法等效于求解一个替代目标函数,大大提高了计算效率和估计结果。 1介绍在基于多尺度加权梯度的融合(MWGF)中,我们宣布,在确定多焦点图像融合的聚焦区域时,焦点测量与其尺度密切相关,并且单个尺度通常不足以获得对误配准和噪声具有鲁棒性的良好融合。因此,提出首先通过使用大尺度聚焦测量来识别确定的聚焦和散焦区域的映射,旨在减弱各向异性模糊和配准错误的影响,然后主要依靠小尺度聚焦测量提供的信息来确定聚焦和散聚焦物体之间过渡区域的权重图。 基于引导滤波的融合方法(GFF)也分别在小尺度和大尺度上基于引导滤波创建了两个尺度权重图,但不是生成一个单独的权重图来进行空间域融合,而是在多尺度融合框架中采用生成的两个尺度图,通过使用小比例尺地图来融合细节层,使用大比例尺地图来进行基础层的融合。 尽管多尺度融合策略有助于通过将每个尺度的映射分布到不同的层来衰减它们引入的伪影,但它仍然无法极大地避免误配准和噪声的影响。 不同于复杂的基于多尺度加权梯度的融合方法(MWGF),其中分别使用大尺度和小尺度聚焦测量来确定确定的聚焦区域和过渡区域的权重图,在本文中,由两个尺度聚焦测量生成的聚焦图被直接馈送到一个统一的估计框架中,以产生一个能够与当前最先进的算法进行良好融合的聚焦图。与许多其他方法相比,所提出的方法不仅可以非常有效地计算,而且更具鲁棒性。 特别是,与GFF和其他现有技术的融合方法相比,它可以克服MWGF可能错过小聚焦或散焦区域检测的限制,并在配准错误的影响下产生更好的融合结果。 2提出的多焦点图像融合方法 2.1双比例聚焦图生成虽然焦点测量的性能在焦点图确定中与其尺度有内在的关系,但我们也可能希望测量本身具有更好的可靠性,从而使我们仅使用有限的两个尺度即可获得良好的焦点图。本文选择我们之前在[25]中提出的基于结构的焦点度量来生成焦点图。该方法是基于图像结构的显著性提出的。它建立在这样一个基本思想之上,即由边缘、角和脊的结构单元组成的图像结构通常是图像中对我们有意义的主要信息。因此,与其他基于梯度、局部方差或二阶导数的焦点度量不同,基于结构的焦点度量对整个有意义的结构非常敏感,这使得它受噪声和其他无关信息的影响较小。 更具体地说,基于结构的焦点度量是基于梯度协方差矩阵的[30]。对于图像I,在X = (x, y)处的梯度协方差矩阵C定义为: 2.2使用随机游动的估计 2.3基于随机游走算法的改进 3结论本文提出了一种基于两尺度聚焦图的有效估计方法来融合多焦点图像。所提出的方法利用了小尺度聚焦图和大尺度聚焦图的互补特性。为了获得更好的聚焦图,引入了一种基于两个尺度聚焦图的随机游动估计。然后,通过重新考虑随机游动的线性系统,我们提高了其在估计结果和运行时间。因此,所提出的方法可以正确地区分小的聚焦或散焦区域,并且对误配准和噪声具有鲁棒性。 此外,我们的方法可以很快产生融合结果。主观和客观评估的实验结果证明,与许多其他最先进的融合方法相比,我们的方法可以获得更好的性能。 核心代码TwoScale_Fusion :综合来看,这个算法首先通过结构相似性焦点方法生成了两个尺度的焦点图,然后通过导向滤波和权重计算对焦点图进行改进。最后,使用稀疏数据插值估计了权重,将两个尺度的焦点图结合起来,得到最终的焦点图 FocusMap。最后,使用 FocusMap 对原始图像进行融合,生成最终的融合图像 Fused。这个算法旨在通过结合不同尺度的信息来提高图像融合的效果。 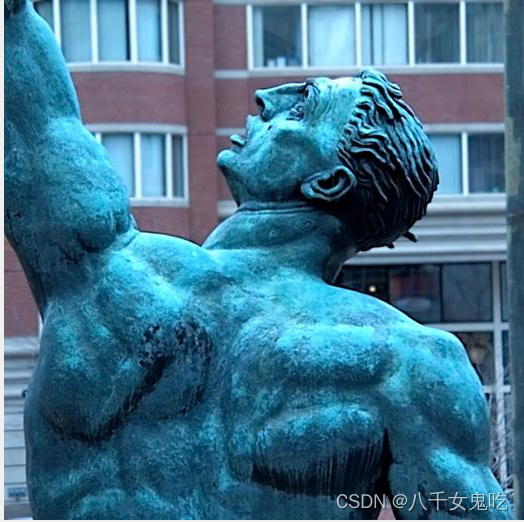 源图像I1
源图像I1
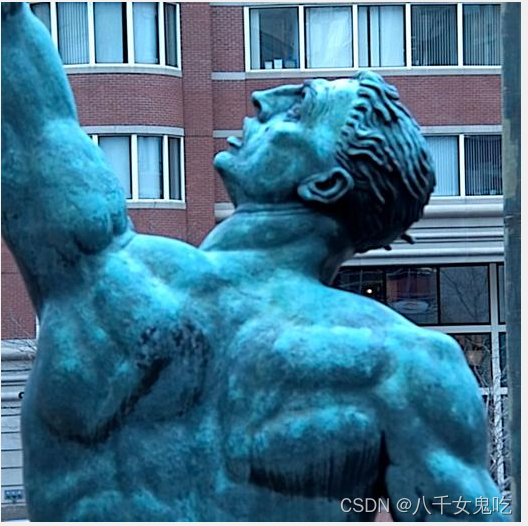 源图像I2
源图像I2
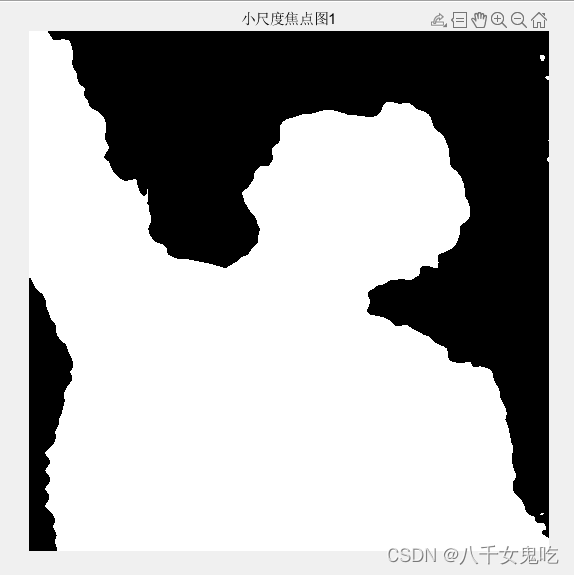
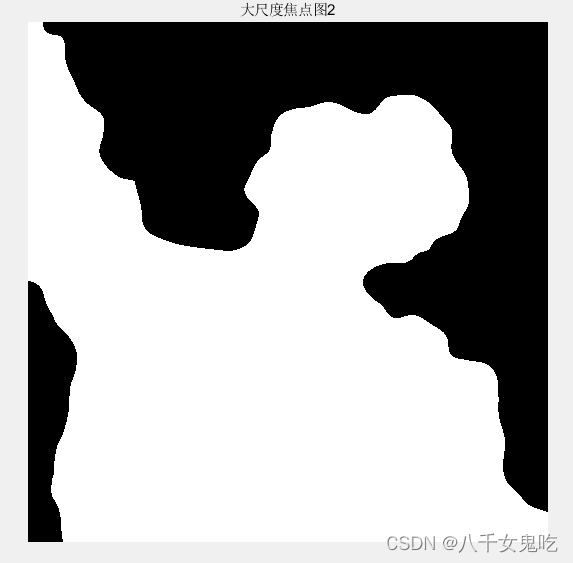
% 调用 Multiscale_ST 函数,生成两个尺度的结构相似性焦点图 map1 和 map2。 % 这两个尺度的焦点图用于表示图像中不同尺度下的焦点分布。 sigma1 = 3; sigma2 = 8; [map1,map2] = Multiscale_ST(I1,I2,sigma1,sigma2);
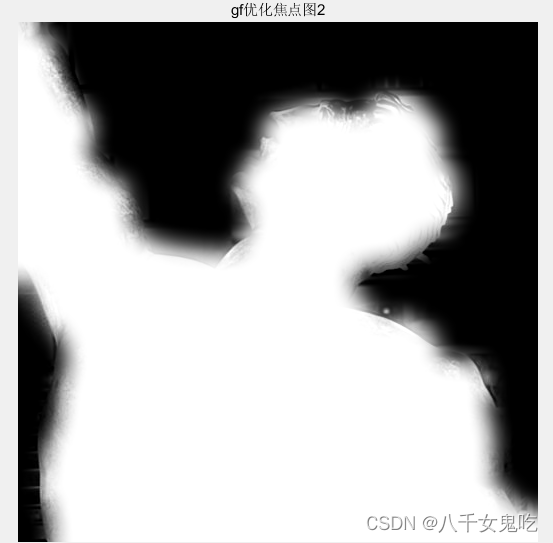
% 使用导向滤波对焦点图进行平滑,以提高焦点图的质量,引导图像为I1。 r1 = 5; eps1 = 10^(-2); r2 = 11; eps2 = 10^(-2); [map1_guided,map2_guided] = Multiscale_Guided(I1, map1, map2, r1, eps1, r2, eps2);
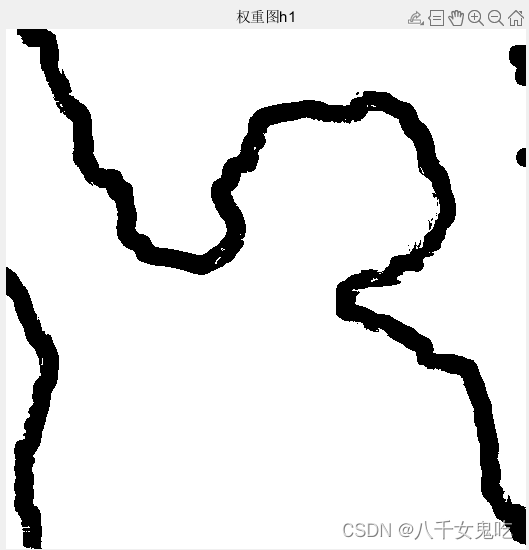
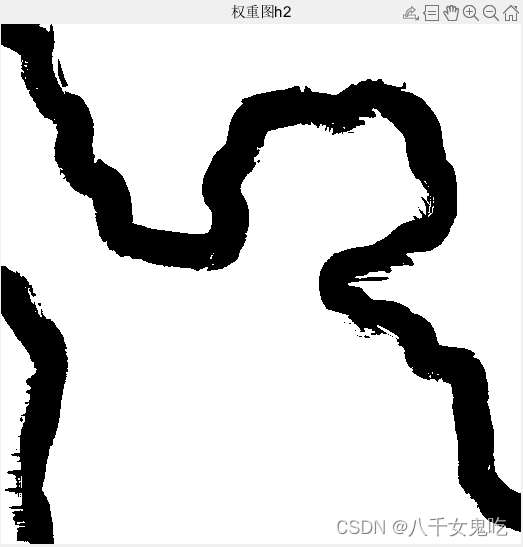
% weight h_ik,基于输入的焦点图,计算两个尺度的权重,用于后续的图像融合。 alpha1 = 0.9; alpha2 = 0.8; [h1,h2] = weight_h(map1_guided,map2_guided,alpha1,alpha2);
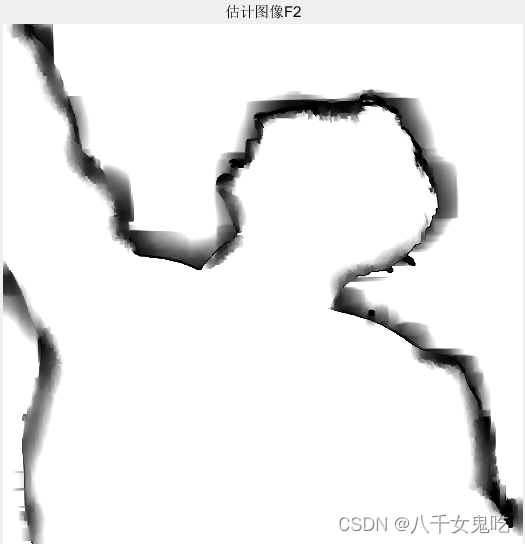
% 使用稀疏数据插值,对权重图 h 进行插值,以获得估计图像 F sigma = 0.02; g = uint8(I1 * 255); h = h1 + h2; F1 = FGS(h1, g, sigma); F2 = FGS(h, g, sigma); x1 = F1 ./ (F2 + eps(F2)); x2 = 1 - x1;
%生成预估焦点图和融合图像 % generating the estimated focus map FocusMap = zeros(size(map1_guided)); FocusMap(x1 >= x2) = map1_guided(x1 >= x2); FocusMap(x2 >= x1) = map2_guided(x2 >= x1); % construct the fused image if size(img1,3) == 1 Fused = FocusMap.*img1 + (1-FocusMap).*img2; else Fused(:,:,1) = FocusMap.*img1(:,:,1) + (1-FocusMap).*img2(:,:,1); Fused(:,:,2) = FocusMap.*img1(:,:,2) + (1-FocusMap).*img2(:,:,2); Fused(:,:,3) = FocusMap.*img1(:,:,3) + (1-FocusMap).*img2(:,:,3);
|



【本文地址】
今日新闻 |
推荐新闻 |