SPH(光滑粒子流体动力学)流体模拟实现五:PCISPH |
您所在的位置:网站首页 › 流体碰撞 › SPH(光滑粒子流体动力学)流体模拟实现五:PCISPH |
SPH(光滑粒子流体动力学)流体模拟实现五:PCISPH
|
SPH(光滑粒子流体动力学)流体模拟实现五:PCISPH
我们知道真实的液体是不可压缩的,但我们在计算机中离散的计算流体运动,在一定的时间步长内,用标准的SPH方法求解,在在粒子聚集处容易发生挤压,造成压缩。有两种常用的方法模拟不可压缩性:1.在WCSPH(弱可压缩SPH)中,利用刚性状态方程(EOS)建模压力。2.通过求解压力泊松方程实现不可压缩性。但这两种方法都有很昂贵的计算费用。 文章“Predictive-Corrective Incompressible SPH”中,提出了一种预测矫正的方法,来使粒子达到不可压缩性,其性能上相比传统两种方法,更加的高效。 PCISPH模型 SPH概述 在拉格朗日粒子描述下, 控制流体运动的偏微分方程 Navier-Stokes 方程可表示为:
SPH方法的核心思想是以离散化粒子的形式来表征连续的场, 并对场量使用积分近似的方式进行计算。位置在xi粒子i的场量:
第i个粒子的密度计算公式为:
压力场直接从Navier-Stokes方程式推导而得:
在PCISPH方法中,速度和位置会及时更新,并估计新的粒子密度。然后,对于每个粒子,计算出参考密度的预测变化,并用于更新压力值,压力值又进入压力的重新计算。此过程一直迭代到收敛,即直到所有粒子密度波动均小于用户定义的阈值η(例如1%)。在完成矫正后,我们再更新速度和位置。详细算法流程图如下:
该算法总体思路如下: 1.计算每个粒子的邻居信息,并记录在邻接表内。 2.计算出了压力之外的所有其他力(黏力,重力)。 3.执行矫正循环:执行1).,2).,3).。 1).预测所有粒子新的的速度和位置。 2).预测所有粒子新的密度,以及计算新密度和旧密度之间的差值。 3).预测所有粒子的压力。 4.完成矫正后,利用矫正的压力计算粒子速度和位置。 压强导数 我们的算法是根据预测的密度计算新的压力值,因此我们需要找到它们之间变化的关系。我们的目的是找到一个压强p,该压强以这样一种方式改变粒子的位置,即预测的密度与参考密度相对应。 对于给定的内核平滑长度h,使用SPH密度求和公式计算时间点t + 1处的密度:
其中
带入
我们令 我们假设邻居具有相等的压强
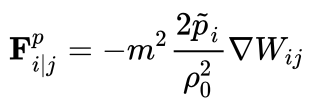
PCISPH算法在每次迭代校正时只矫正d流体粒子的压力,通过迭代计算出的压力让粒子之间不至于靠的过近(粒子之间距离太近可以理解为流体可压缩)。在只考虑压力
粒子i在获得粒子j的压力同时,也会对领居粒子j施加反作用力,因此:
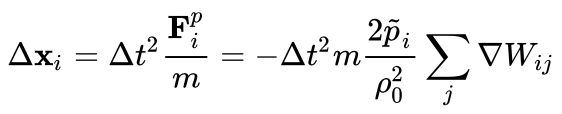
同样,由于粒子i导致粒子j产生的位移为:
将位移增量带入密度增量公式:
因此 其中
这个压强计算公式在邻居粒子数目不足的时候会导致计算错误,解决办法是进行一次预计算,即在流体粒子周围充满邻居粒子的情况下计算。我们可以直接在初始化流体时计算一次系数
因此,我们的压强改变量
由于只要不满足不可压缩条件,我们就重复进行预测校正步骤,因此,我们需要在迭代中不断矫正压强:
算法实现 我们之前提到,在计算系数 其中_computeGradWValues()代码如下: void FluidSystem::_computeGradWValues(){ float h2=m_smoothRadius*m_smoothRadius;//h^2 const int numP=m_pointBuffer.size(); for (int i=0; isum_grad_w=glm::vec3(0.0f); pi->sum_grad_w_dot=0.0f; } for (int i=0; ikernel_self=_computeNeighbor(i); m_neighborTable.point_commit(); int neighborCounts=m_neighborTable.getNeighborCounts(i); //预测密度计算 for (int j=0; jpos-pj->pos)*m_unitScale; float r2=pi_pj.x*pi_pj.x+pi_pj.y*pi_pj.y+pi_pj.z*pi_pj.z; if(h2>r2){ float h2_r2=h2-r2; r=pow(r2,0.5f); float h=m_smoothRadius; glm::vec3 gradVec=(pi->pos-pj->pos)*m_kernelSpiky/r*(h-r)*(h-r); pi->sum_grad_w+=gradVec; pj->sum_grad_w-=gradVec; pi->sum_grad_w_dot+=glm::dot(gradVec,gradVec); pj->sum_grad_w_dot+=glm::dot(-1.0f*gradVec,-1.0f*gradVec); } } } }我们在其中计算所有粒子的 之后我们在函数_computeDensityErrorFactor()中计算系数 值得注意的是,我们还在 计算完成预计算的 我们按照算法流程,首先求解领居结构,这在之前的章节里介绍过,这里就不多提了。 然后计算除了压力的所有外力,该函数_computerExternalForces()代码如下: void FluidSystem::_computerExternalForces(){ float h2=m_smoothRadius*m_smoothRadius;//h^2 for(int i=0;iforces=glm::vec3(0.0); //邻居粒子装载 pi->kernel_self=_computeNeighbor(i); m_neighborTable.point_commit(); //外力计算 int neighborCounts=m_neighborTable.getNeighborCounts(i); const float restVolume=m_pointMass/m_restDensity; for(unsigned int j=0;jforces-=(pi->velocity-pj->velocity)*vterm; } //F_gravity pi->forces+=m_gravityDir*m_pointMass; //F_boundary pi->forces+=_boundaryForce(pi)*m_pointMass; //初始化矫正因子 pi->correction_pressure=0.0f; pi->correction_pressure_froce=glm::vec3(0.0); } }计算完成外力后,进入矫正预测环节,该函数_predictionCorrection()代码为: void FluidSystem::_predictionCorrection(){ _density_error_too_large=true; int iteration=0; while ((iteration |











【本文地址】
今日新闻 |
推荐新闻 |