(8 |
您所在的位置:网站首页 › 汇聚型边界特征是什么 › (8 |
(8
|
8.4 形状特征
形状特征是用于描述图像或物体形状的特征,它们可以用于图像分析、目标检测、图像识别和计算机视觉等领域。形状特征提取的目标是从图像中提取出能够描述物体形状的信息,以便对物体进行识别、分类或测量。常用的形状特征提取方法有:边界描述子、预处理后的轮廓特征、模型拟合方法、形状上的变换。 8.4.1 边界描述子边界描述子是一种常用的形状特征提取方法,它通过对物体的边界进行分析和描述,从中提取出能够描述形状的特征。下面我将详细介绍边界描述子的原理,并给出两个实用且稍微复杂的例子。边界描述子的实现过程如下所示: 获取物体的边界:首先需要获取物体的边界,可以通过边缘检测算法(如Canny边缘检测)或轮廓检测算法(如OpenCV中的findContours函数)来获得物体的边界。归一化边界:对于获取的边界点集,将其进行归一化处理,使得边界的起点为坐标原点,同时进行平移和缩放操作,使得边界点分布在一个固定的区域内。提取边界描述子:对归一化后的边界点集进行特征提取。常见的边界描述子包括:傅里叶描述子(Fourier Descriptors):将归一化的边界点集进行傅里叶变换,提取频域特征。傅里叶描述子可以用于对边界形状的旋转、缩放和平移具有不变性。形状上下文(Shape Context):通过计算边界点与其他点之间的相对位置关系,构建形状上下文描述子。形状上下文描述子可以用于对边界形状的旋转和尺度具有不变性。应用边界描述子:提取的边界描述子可以用于形状匹配、物体识别和分类等任务。在现实应用中,可以通过如下两种方法实现边界描述子在形状特征提取中的应用。 (1)使用傅里叶描述子进行形状匹配 假设我们有一组图像中的物体边界,我们想要在新的图像中识别相似形状的物体,那么: 对于每个图像的物体边界,应用边缘检测算法获取边界点集。对边界点集进行归一化处理。对归一化后的边界点集计算傅里叶描述子。在新的图像中,提取物体边界并进行归一化处理。对新图像的归一化边界点集计算傅里叶描述子。对比新图像的傅里叶描述子与之前图像的傅里叶描述子,使用相似度度量方法(如欧氏距离)进行形状匹配。例如下面是一个使用Python语言实现傅里叶描述子形状匹配的简单例子。 实例8-8:实现傅里叶描述子形状匹配 源码路径:daima\8\foliye.py import cv2 import numpy as np def calculate_fourier_descriptor(image): # 提取轮廓 contours, _ = cv2.findContours(image, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_NONE) contour = contours[0] # 假设只有一个轮廓 # 计算傅里叶描述子 contour_complex = np.empty(contour.shape[:-1], dtype=complex) contour_complex.real = contour[:, 0, 0] contour_complex.imag = contour[:, 0, 1] fourier_descriptor = np.fft.fft(contour_complex) return fourier_descriptor # 读取数据库图像和查询图像 database_image = cv2.imread('database.jpg', cv2.IMREAD_GRAYSCALE) query_image = cv2.imread('query.jpg', cv2.IMREAD_GRAYSCALE) # 预处理图像(二值化等) _, database_image = cv2.threshold(database_image, 127, 255, cv2.THRESH_BINARY) _, query_image = cv2.threshold(query_image, 127, 255, cv2.THRESH_BINARY) # 计算数据库图像和查询图像的傅里叶描述子 database_descriptor = calculate_fourier_descriptor(database_image) query_descriptor = calculate_fourier_descriptor(query_image) # 计算傅里叶描述子之间的距离 distance = np.linalg.norm(database_descriptor - query_descriptor) print("Distance:", distance)在上述代码中,请确保已准备好两幅图像作为数据库图像和查询图像,并将其命名为 database.jpg 和 query.jpg。此代码将计算数据库图像和查询图像的傅里叶描述子,并计算描述子之间的欧氏距离作为形状匹配的度量。请注意,此示例仍然假设图像中只有一个轮廓,您可能需要根据实际情况进行调整。 (2)使用形状上下文描述子进行手势识别 假设我们有一组手势的图像,我们想要对新的手势图像进行识别,那么: 对于每个手势图像,应用边缘检测算法获取边界点集。对边界点集进行归一化处理。对归一化后的边界点集计算形状上下文描述子。在新的手势图像中,提取边界并进行归一化处理。对新图像的归一化边界点集计算形状上下文描述子。对比新图像的形状上下文描述子与之前手势图像的描述子,使用相似度度量方法(如相关系数)进行手势识别。例如下面是一个使用HOG特征和支持向量机(Support Vector Machine, SVM)实现手势识别的例子。 实例8-9:使用HOG特征和支持向量机实现手势识别 源码路径:daima\8\xing.py import cv2 import numpy as np from sklearn.svm import SVC from skimage.feature import hog from skimage import data, exposure # 加载手势图像数据集 gesture_images = [] gesture_labels = [] for i in range(1, 6): image = cv2.imread(f'gesture_{i}.jpg', cv2.IMREAD_GRAYSCALE) gesture_images.append(image) gesture_labels.append(i) # 提取手势图像的HOG特征 gesture_hogs = [] for image in gesture_images: # 计算HOG特征 hog_features, hog_image = hog(image, orientations=9, pixels_per_cell=(8, 8), cells_per_block=(2, 2), visualize=True) # 对HOG图像进行直方图均衡化,增强可视化效果 hog_image = exposure.rescale_intensity(hog_image, in_range=(0, 10)) gesture_hogs.append(hog_features) # 创建SVM分类器 svm = SVC() # 使用HOG特征训练分类器 svm.fit(gesture_hogs, gesture_labels) # 加载待识别手势图像 test_image = cv2.imread('test_gesture.jpg', cv2.IMREAD_GRAYSCALE) # 提取待识别手势图像的HOG特征 test_hog = hog(test_image, orientations=9, pixels_per_cell=(8, 8), cells_per_block=(2, 2)) # 使用SVM分类器进行手势识别 predicted_label = svm.predict([test_hog]) print("Predicted Label:", predicted_label[0])在上述代码中使用库skimage的hog函数来提取手势图像的HOG特征。然后,使用这些特征和对应的标签训练了一个支持向量机(SVM)分类器。接下来,加载待识别的手势图像,提取其HOG特征,并使用SVM分类器进行手势识别,得到预测标签。请确保您准备了手势图像数据集,并将手势图像命名为 gesture_1.jpg、gesture_2.jpg 等,并将待识别的手势图像命名为 test_gesture.jpg。此代码将根据HOG特征进行手势识别,并输出预测的手势标签。 通过边界描述子的提取和匹配,我们可以实现对具有相似形状的物体或手势进行识别和分类。这些例子展示了边界描述子在形状特征提取中的应用,具有实用性、有趣性和一定的复杂性。 8.4.2 预处理后的轮廓特征预处理后的轮廓特征是一种常用的图像特征提取方法,它通过对图像进行预处理和轮廓提取,然后分析轮廓的形状、大小、方向等特征来描述图像的形状和结构。预处理后的轮廓特征基于对物体边界进行预处理,以减少噪声和不相关信息。常用的方法有: (1)链码(Chain Code):是一种用于形状描述和特征提取的方法,它将轮廓视为一系列相邻的像素点的有序序列,通过记录像素点之间的连接顺序来表示轮廓的形状。链码方法具有简洁、紧凑的表示形式,适用于描述闭合轮廓的形状特征。将边界转换为链码,描述连续的边界点之间的连接关系。例如下面是一个使用轮廓近似方法(cv2.approxPolyDP)实现链码特征提取的例子。 实例8-10:使用轮廓近似方法(cv2.approxPolyDP)实现链码特征提取 源码路径:daima\8\lian.py import cv2 import math # 读取图像并转为灰度图像 image = cv2.imread('888.jpg') gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY) # 二值化处理 _, binary = cv2.threshold(gray, 127, 255, cv2.THRESH_BINARY) # 查找轮廓 contours, _ = cv2.findContours(binary, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_NONE) # 获取最长轮廓 longest_contour = max(contours, key=len) # 使用链码获取形状特征 epsilon = 0.02 * cv2.arcLength(longest_contour, True) chain_code = cv2.approxPolyDP(longest_contour, epsilon, True) # 计算距离直方图 max_distance = 0 distance_histogram = [0] * 16 for i in range(len(chain_code) - 1): dx = chain_code[i + 1][0][0] - chain_code[i][0][0] dy = chain_code[i + 1][0][1] - chain_code[i][0][1] distance = int(math.sqrt(dx ** 2 + dy ** 2) * 15 / max_distance) if max_distance != 0 else 0 distance_histogram[distance] += 1 # 打印距离直方图 for i, count in enumerate(distance_histogram): print(f'Distance {i}: {count}') # 显示轮廓和特征提取结果 cv2.drawContours(image, [longest_contour], 0, (0, 0, 255), 2) cv2.imshow('Contour', image) cv2.waitKey(0) cv2.destroyAllWindows()在上述代码中,首先读取图像并将其转换为灰度图像,对灰度图像进行二值化处理,通过阈值将图像转换为黑白两色。然后使用cv2.findContours函数找到图像中的轮廓,根据轮廓的面积排序,选择最大的轮廓作为感兴趣的轮廓。接下来,使用cv2.approxPolyDP函数对感兴趣的轮廓进行多边形逼近,得到轮廓的链码表示。最后,计算链码中每个相邻点的距离,并统计距离的分布,并绘制距离分布直方图,展示轮廓的形状特征。执行效果如图8-3所示。
图8-3 执行效果 (2)形状上下文(Shape Context):是一种常用的形状特征提取方法,它通过描述物体轮廓上的点与其他点之间的关系来表示形状信息。形状上下文方法基于以下两个关键思想: 形状点的位置不足以完整描述形状,需要考虑其与其他点的相对位置关系。形状上下文特征用来描述形状点与其他点之间的相对距离和角度。形状上下文的提取步骤如下所示: 选择一组形状点(例如轮廓上的点)作为参考点集。计算每个参考点与其他点之间的相对距离和角度。将这些距离和角度信息组成一个向量,形成形状上下文特征。在Python中可以使用库Mahotas库实现形状特征提取功能,它提供了一个名为mahotas.features.zernike_moments的函数,用于计算Zernike矩特征。例如下面的代码演示了这一用法。 实例8-11:使用库Mahotas库实现形状特征提取 源码路径:daima\8\shangxia.py import cv2 import numpy as np import mahotas.features # 读取图像 image = cv2.imread('shape.jpg', cv2.IMREAD_GRAYSCALE) # 二值化图像 _, threshold = cv2.threshold(image, 127, 255, cv2.THRESH_BINARY) # 寻找轮廓 contours, _ = cv2.findContours(threshold, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_NONE) # 提取第一个轮廓 contour = contours[0] # 计算Zernike矩特征 zernike_moments = mahotas.features.zernike_moments(contour, radius=21) # 打印特征向量 print(zernike_moments)在上述代码中,使用OpenCV库读取图像,然后进行二值化处理。接下来,使用OpenCV的findContours函数找到图像中的轮廓,并选择第一个轮廓。最后,使用Mahotas库的zernike_moments函数计算轮廓的Zernike矩特征。 8.4.3 模型拟合方法模型拟合方法假设物体的形状可以由特定的数学模型来表示,然后通过对模型参数进行拟合来提取形状特征。常用的方法有: (1)椭圆拟合(Ellipse Fitting):将物体边界拟合为椭圆,并提取椭圆参数作为形状特征。当使用椭圆拟合进行图像特征提取时,通常的步骤如下: 读取图像并进行预处理,例如灰度化、二值化等操作。检测图像中的轮廓,可以使用图像处理库(如OpenCV)中的函数进行轮廓检测。对每个轮廓应用椭圆拟合算法,以获得拟合的椭圆参数。根据椭圆参数提取特征,例如椭圆的中心坐标、长轴长度、短轴长度、旋转角度等。例如下面是一个使用库OpenCV进行椭圆拟合的例子。 实例8-13:使用库OpenCV进行椭圆拟合 源码路径:daima\8\tuo.py import cv2 import numpy as np # 读取图像并进行预处理 image = cv2.imread('image.jpg') gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY) _, thresh = cv2.threshold(gray, 127, 255, cv2.THRESH_BINARY) # 轮廓检测 contours, _ = cv2.findContours(thresh, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE) # 对每个轮廓应用椭圆拟合 ellipses = [] for contour in contours: if len(contour) >= 5: ellipse = cv2.fitEllipse(contour) ellipses.append(ellipse) # 提取特征 for ellipse in ellipses: center, axes, angle = ellipse x, y = map(int, center) major_axis, minor_axis = map(int, axes) rotation_angle = int(angle) # 在图像上绘制椭圆 cv2.ellipse(image, ellipse, (0, 255, 0), 2) # 打印特征信息 print("椭圆中心坐标:", (x, y)) print("长轴长度:", major_axis) print("短轴长度:", minor_axis) print("旋转角度:", rotation_angle) # 显示结果图像 cv2.imshow("Ellipse Fitting", image) cv2.waitKey(0) cv2.destroyAllWindows()在上述代码中,首先读取图像并进行预处理,然后使用cv2.findContours函数检测图像中的轮廓。接下来,对每个轮廓应用cv2.fitEllipse函数进行椭圆拟合,获取拟合的椭圆参数。最后,根据椭圆参数提取特征并在图像上绘制椭圆。执行效果如图8-4所示。
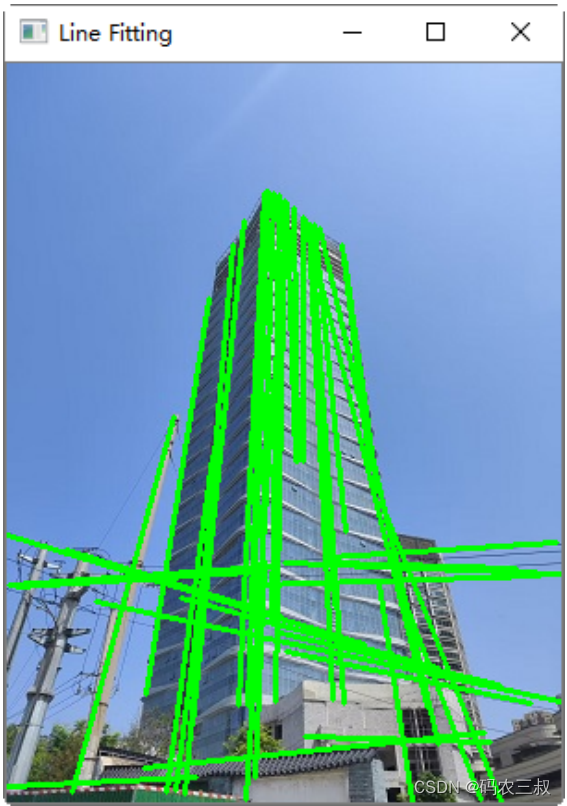
图8-4 执行效果 请注意,该例子仅演示了基本的椭圆拟合和特征提取过程。根据实际需求,您可能需要根据拟合结果进行更复杂的特征提取和分析。 (2)直线拟合(Line Fitting):将物体边界拟合为直线段,并提取直线参数作为形状特征。当使用直线拟合进行图像特征提取时,基本实现步骤如下: 读取图像并进行预处理,例如灰度化、二值化等操作。检测图像中的边缘,可以使用边缘检测算法(如Canny边缘检测)。根据边缘图像,检测图像中的直线段。对检测到的直线段应用直线拟合算法,以获得拟合的直线参数。根据直线参数提取特征,例如直线的斜率、截距等。例如下面是一个使用OpenCV库实现直线拟合的例子。 实例8-14:使用OpenCV库实现直线拟合 源码路径:daima\8\zhi.py import cv2 import numpy as np # 读取图像并进行预处理 image = cv2.imread('image.jpg') gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY) edges = cv2.Canny(gray, 50, 150) # 检测直线段 lines = cv2.HoughLinesP(edges, 1, np.pi / 180, threshold=100, minLineLength=100, maxLineGap=10) # 绘制检测到的直线 for line in lines: x1, y1, x2, y2 = line[0] cv2.line(image, (x1, y1), (x2, y2), (0, 255, 0), 2) # 提取特征 for line in lines: x1, y1, x2, y2 = line[0] # 计算直线斜率和截距 slope = (y2 - y1) / (x2 - x1) intercept = y1 - slope * x1 # 打印特征信息 print("直线斜率:", slope) print("直线截距:", intercept) # 显示结果图像 cv2.imshow("Line Fitting", image) cv2.waitKey(0) cv2.destroyAllWindows()在上述代码中,首先读取图像并进行预处理,然后使用Canny边缘检测算法获取图像的边缘图像。接下来,使用cv2.HoughLinesP函数检测图像中的直线段。然后,根据检测到的直线段在图像上绘制直线。最后,根据直线参数提取特征,例如直线的斜率和截距。执行效果如图8-5所示。
图8-5 执行效果 8.4.4 形状上的变换形状上的变换方法通过将形状进行变换,如缩放、旋转和平移等,来提取形状特征。常用的方法有: (1)尺度不变特征变换(Scale-Invariant Feature Transform,SIFT):通过对形状进行尺度空间的变换,提取尺度不变的形状特征。尺度不变特征变换是一种用于图像特征提取的算法,它可以在不同尺度、旋转和光照条件下检测和描述图像中的关键点。SIFT算法具有良好的尺度不变性和旋转不变性,因此在目标识别、图像匹配和三维重建等领域得到广泛应用。SIFT算法的主要步骤如下: 尺度空间构建:通过使用高斯差分函数对图像进行多次平滑和差分操作,构建尺度空间。关键点检测:在尺度空间中寻找极值点,作为关键点候选。关键点定位:通过在尺度空间的极值点周围进行精确定位,排除低对比度和边缘响应不明显的关键点。方向分配:为每个关键点分配主方向,用于后续的旋转不变性。关键点描述:基于关键点周围的图像区域计算特征向量,形成关键点的描述子。特征匹配:通过计算描述子之间的相似性,实现关键点的匹配。例如下面是使用库OpenCV实现SIFT算法的例子。 实例8-15:使用库OpenCV实现SIFT算法 源码路径:daima\8\chidu.py import cv2 # 读取图像 image = cv2.imread('image.jpg') # 创建SIFT对象 sift = cv2.SIFT_create() # 检测关键点和计算描述子 keypoints, descriptors = sift.detectAndCompute(image, None) # 绘制关键点 image_with_keypoints = cv2.drawKeypoints(image, keypoints, None) # 显示结果图像 cv2.imshow("SIFT Features", image_with_keypoints) cv2.waitKey(0) cv2.destroyAllWindows()本实例展示了如何使用SIFT算法提取图像的关键点和描述子,并将关键点绘制在图像上。SIFT算法具有较强的尺度不变性和旋转不变性,因此提取的特征可以在不同尺度和旋转条件下进行匹配和识别。在上述代码中,首先读取图像,并使用cv2.SIFT_create()创建SIFT对象。然后,使用sift.detectAndCompute()方法检测关键点并计算描述子。接下来,使用cv2.drawKeypoints()函数将关键点绘制在图像上。最后,显示结果图像。执行效果如图8-6所示。
图8-6 执行效果 注意:SIFT算法是一种经典的特征提取方法,但由于其涉及到专利问题,OpenCV的最新版本中可能没有SIFT算法。您可以使用之前的版本,或者考虑其他开源实现的SIFT算法,如VLFeat库等。 (2)主成分分析(Principal Component Analysis,PCA):通过对形状进行主成分分析,提取主要的形状特征。主成分分析是一种常用的降维技术,也可以用于图像形状特征提取。PCA可以通过线性变换将原始数据转换为新的坐标系,使得数据在新坐标系下具有最大的方差。在图像形状特征提取中,PCA可以帮助我们找到最具代表性的形状特征,从而实现形状的描述和分类。使用PCA进行形状特征提取的基本步骤如下: 数据准备:将形状数据表示为一组特征向量或特征点集合的形式。每个特征向量或特征点表示形状的一部分。特征标准化:对特征进行标准化处理,使其具有相同的尺度和范围。可以使用均值移除和缩放等方法来实现标准化。协方差矩阵计算:计算特征的协方差矩阵,表示不同特征之间的相关性。特征值分解:对协方差矩阵进行特征值分解,得到特征值和特征向量。特征选择:选择具有最大特征值的特征向量,这些特征向量对应的特征是数据中最具代表性的形状特征。特征投影:将原始数据投影到选定的特征向量上,得到新的特征表示,即形状特征。例如下面是一个使用库Scikit-learn实现PCA形状特征提取的例子。 实例8-16:使用库Scikit-learn实现PCA形状特征提取 源码路径:daima\8\zhu.py import numpy as np from sklearn.decomposition import PCA # 假设有一个形状数据集,表示为特征向量的集合 shape_data = np.array([[1, 2, 3], [4, 5, 6], [7, 8, 9], [10, 11, 12]]) # 创建PCA对象 pca = PCA(n_components=2) # 执行PCA降维 shape_features = pca.fit_transform(shape_data) # 输出降维后的形状特征 print(shape_features)在上述代码中,首先准备了一个形状数据集,表示为一个特征向量的集合。然后,创建了一个PCA对象,并指定要保留的主成分数量为2。接下来,使用fit_transform()方法执行PCA降维操作,并将原始形状数据集转换为降维后的形状特征表示。最后,打印输出降维后的形状特征。执行后会输出: [[ 7.79422863 0. ] [ 2.59807621 0. ] [-2.59807621 0. ] [-7.79422863 -0. ]]本实例展示了如何使用PCA进行形状特征提取。通过选择适当的主成分数量,我们可以获得最具代表性的形状特征,从而实现形状的描述和分类。 注意:PCA是一种常见的降维技术,也可以用于形状特征提取。除了上述示例中的简单数据集,PCA还可以应用于更复杂的形状数据,例如图像的轮廓或特征点集合。在实际应用中,您可以根据具体的问题和数据类型选择适当的形状表示方法和PCA参数设置。 注意:本节介绍的以上方法只是一些常用的形状特征提取方法,在实际应用中还可以根据具体任务和数据特点选择适合的方法。形状特征的选择和提取需要结合具体的应用场景和需求,并考虑图像的噪声、变形、光照等因素。 未完待续 |



【本文地址】