高速电机之转子动力学 |
您所在的位置:网站首页 › 求解结构原始刚度方程如何处理支承条件 › 高速电机之转子动力学 |
高速电机之转子动力学
|
一、研究背景与意义 高速电机与常规电机有很大不同,转子在高速和超高速运行情况下,电机振动异常明显,当振动超过一定程度时会带来各种危害,包括噪音、材料疲劳、转子失稳和轴系断裂等一系列严重后果。引起振动的原因主要是转子设计缺陷、残余不平衡质量、转轴初始弯曲、转子不对中和转子裂纹等,而转子动力学正是为服务旋转机械而发展起来,专门研究其振动及动力特性,在电机设计阶段对转子轴系进行振动的仿真计算,保证电机在高速运行过程中有良好的动态性能。 二、理论基础概述 转子动力学分析主要包括稳定性分析、临界转速计算和加载状态下的动态响应三部分。稳定性分析的对象多是针对空气轴承、油膜轴承和磁悬浮轴承支撑的旋转机械,这三种轴承与机械轴承不同,游隙较大,所以需要分析其支撑的稳定性。 高速电机转子系统在某些转速下运行时其振动异常剧烈,从而导致机器无法正常运行,这些转速即为系统的各阶临界转速。所以,对于刚型转子,工作转速n应该低于一阶临界转速 加载状态下的动态响应研究主要是分析电机在实际工作状态下转子动态运行过程,通过仿真计算得到电机转子在高速运行过程中任何一点的轴心轨迹,从而得到转子的振动幅值,为转子系统的稳定性研究提供理论依据。 三、转子系统模型 一般转子动力学的分析模型有三种,包括有Jeffcott模型、有限元法和传递矩阵法,当然也有少数人在使用键合图法。 1、Jeffcott转子模型 Jeffcott转子模型应该是转子动力学中最简单的模型,两端弹性支承起中间的一根无质量轴,唯一需要考虑的就是中间的刚性圆盘,并且在刚性圆盘的分析中还不考虑其偏转作用,仅仅只是假设盘在平面内运动。Jeffcott转子模型对于复杂的转子的简化过于粗糙,计算的到的结果偏差较大,是转子动力学发展历史上最原始的模型。   2、传递矩阵模型 传递矩阵法的分析方法是将转子系统离散成若干个子单元,然后确定子单元端面上的力学状态矢量,建立每个单元两端之间的传递矩阵,利用矩阵相乘的方式对转子结构进行动力学分析。这种方法对于同轴多圆盘转子这样的链式结构系统具有独特的优势。优点是矩阵的阶数不会随着系统的自由度数增加,编程简单,计算量小;缺点是计算精度低,分析复杂系统时容易出现数值不稳定和漏根的现象。 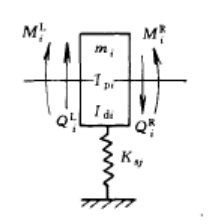 3、有限元模型 用有限元的方法分析转子动力学问题最始于1970年,而Ruhl是最早将此方法应用于转子动力学中的。用有限元法分析转子动力学时,模型的有限元微分方程简洁、规范、准确,随着现代计算机技术的发展,有限元计算越来越准确,是目前的最佳选择。  如上图所示,有限元的思想就是将转子划分成一些很小的微元,然后根据功能原理,推导得到微元的质量、阻尼和刚度矩阵,然后将所有微元的矩阵组装,得到整个转子的质量矩阵M、阻尼矩阵C、刚度矩阵K和力矩阵F,再按照一般动力学方程:  采用Newmark- 总结上诉三种方法可以得出结论:Jeffcott转子模型适合于工程中进行一个大概的估值计算,并不能得到一个精确的计算结果,但对于具体的问题研究还是要通过计算找到其中规律,严密的理论推导过程就必不可少,所以对于一些高精密的设备,理论计算还是得采用有限元法或是传递矩阵法。 四、有限元模型与算法 针对转轴系统,基于动力学问题的特性,其模型的建立主要便是运动方程的形成。动力体系运动方程的形成,即质量矩阵M、阻尼矩阵C、刚度矩阵K和力矩阵F的求取,是整个动力学分析中既重要又困难的环节。 1、连续梁理论 转子结构主要包括圆盘和轴段两种单元,应用转子动力学有限元法时 ,一般将飞轮做刚体处理并简化为集中参数单元。而轴段则应用连续梁理论来推导其运动微分方程,目前常用的梁理论包括:Euler-Bernoulli梁、Rayleigh梁、Shear梁和Timoshenko梁理论。 Euler-Bernoulli梁理论即经典梁理论,最早出现,其建立在如下假定的基础上:(1)变形前垂直于梁中心线的平截面,变形后仍保持为平面;(2)变形后的横截面仍垂直于中性层;(3)横截面上没有任何的伸长或缩短。Euler-Bernoulli梁模型没有考虑剪切变形和转动惯量,而其余三种梁模型均考虑了,如下表所示:  2、Timoshenko梁理论 2.1弹性轴单元 Timoshenko梁的质量、刚度和陀螺矩阵单元通过能量法求得单元的动能和势能便可得到。计算模型如下图2.1所示,单元长为L的弹性轴单元,单元内任意一点长为S。  从图中可以看出,梁单元含有两个节点,每个节点有U、W、 为X方向自由度,W为Y方向自由度, 所以梁单元可以看做两节点单元,单元的位移向量可以用两端的节点表示为向量  沿X轴方向,在距左边节点s的截面,截面上的位移可用插值函数与位移向量相乘得到     上式中           E为杨氏弹性模量,G为剪切弹性模量,I为截面极惯性矩,A为单元截面面积, 所以,轴单元在转速   上式中右端第一项为平动动能,第二项为转动动能,第三项为陀螺力矩动能。
单元的应变能为  上式中等号右端第一项为弯曲应变能,第二项为剪切应变能。 根据拉格朗日定理,从单元动能方程中可以得到单元质量矩阵  通过应变能方程可得单元刚度矩阵  以及陀螺矩阵  在MATLAB中按上式进行积分即可得到单元的质量矩阵、刚度矩阵和陀螺矩阵。 2.2附加零部件单元 实际的电机转子轴系除了转子和转轴外,还有螺母、套筒以及轴承内外圈等零部件,这些零部件对转子轴系的动态特性具有不可忽略的影响,在计算时必须当作附加质量矩阵  矩阵中,   式中,D、 3、转子轴系模态的求解方法 模态是指结构所固有的的频率和振型等特性,每个模态拥有特定的固有频率、阻尼和模态振型。模态参数可以由计算或实验分析获得,将利用计算分析或实验分析方法提取每一个模态所具有的模态特性参数的过程称为模态分析。 根据机械系统的动力学公式:  式中:M、C、K-转子系统的质量矩阵、阻尼矩阵和刚度矩阵, 计算转子固有频率和振型,可以忽略系统阻尼,而且在  时做得到的自然属性,即:  转子做同步简谐运动,令  代入上式可以得到:  而式有解的充要条件是:  也就是行列式的值为零,有上式可得一组解的特征值 五、有限元算法准确性校对 为验证计算程序的准确性,本章节挑选一本转子动力学教科书上的算例进行校对,算例描述如下:  某H型空气压缩机的高压转子如上图所示,转子两端外伸,各装有一个叶轮。转子中央有一小齿轮,它与电动机的大齿轮啮合=。转子由两个可倾瓦油膜轴承支撑,工作转速20194rpm,轴承节点在9与17号,转子弹性模量E=206GPa,密度7850 本算法的计算结果与教材中前两阶的结果差异在5%以内,故本算法对临界转速的计算准确度较高。 另外,教材中的给出了轴承支撑刚度为  将本算法中轴承刚度调至相同,计算转子振型如下图所示:  对比上述两振型图中的曲线能发现,本算法计算出来的振型与教材中的振型基本吻合。 如果有朋友对该方向感兴趣,推荐两本书吧,这两本是特别好的入门书籍: 本文纯从数学和力学的角度来推导转子动力学方程,对使用者理论基础要求较高,若想简单方便,可用商业软件进行计算,计算方法见下文: 温暖纯良:高速电机之转子动力学APDL温暖纯良:高速电机之转子动力学WorkBench别忘了点赞哦 |
【本文地址】
今日新闻 |
推荐新闻 |