自制DIY 机器狗 完全教程 |
您所在的位置:网站首页 › 机器狗怎么连接网络 › 自制DIY 机器狗 完全教程 |
自制DIY 机器狗 完全教程
|
自制DIY 机器狗 完全教程 - MIT猎豹Cheetah
背景结构设计模块化关节电机性能考虑关节结构
四足平台设计腿部设计身体设计脚部设计
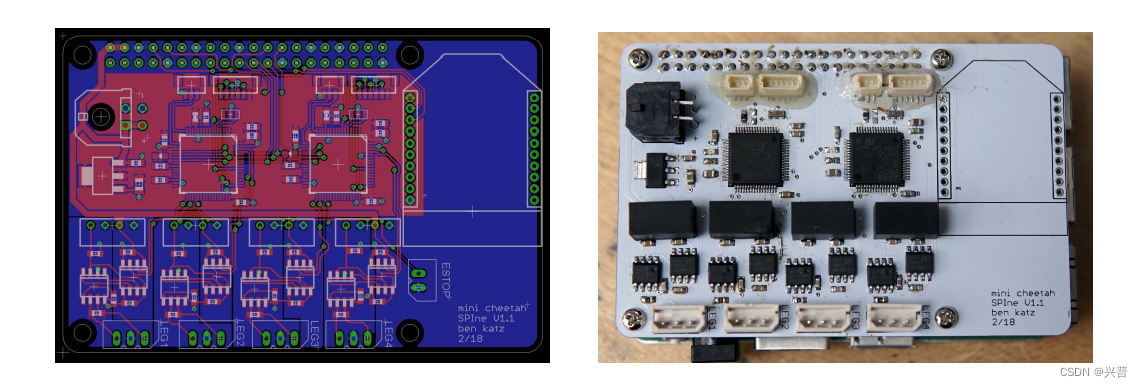
硬件设计关节驱动器通信总线板供电系统
控制系统人工智能
背景
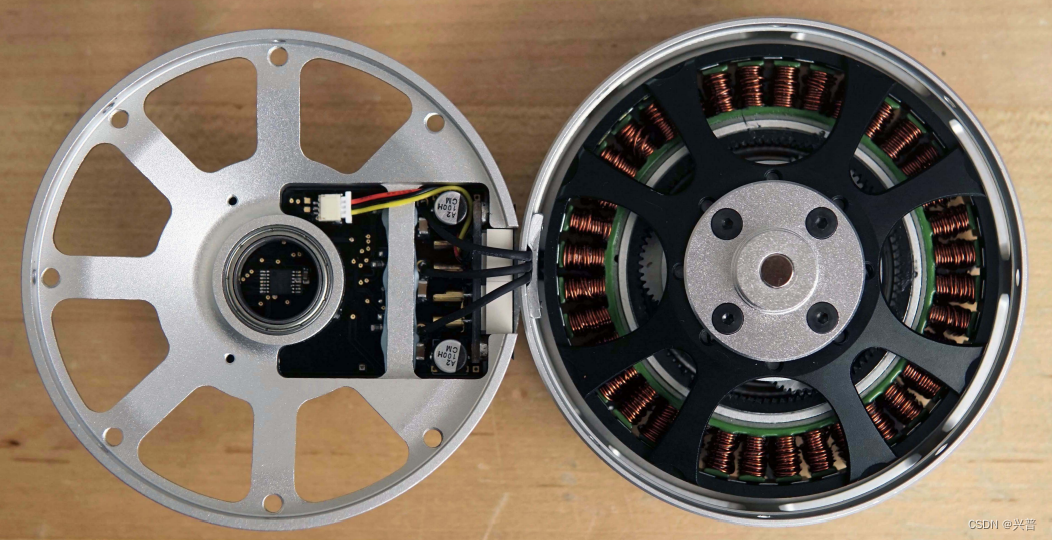
3年前,MIT开源了世界上跑得最快最灵活的猎豹机器狗,自此以后,出现了大量商业化的机器狗,这里就不再一一介绍。只能说作为一个军方赞助的项目,能够开源,实属不易。 好消息是,2个月前,MIT的一个专注于猎豹的人工智能项目开源,有了大脑的机器狗现在会更加灵活。让我们来看看,猎豹机器狗进化的程度。 MIT MIni 猎豹 强化学习 模型 MIT Mini 猎豹 后空翻 结构设计 模块化关节电机 性能考虑为了能够使得重达9.8公斤的机器狗可以灵活跑动,后空翻,对于关节电机的性能也有一定要求。每个关节电机的参数如下图,每条腿3个电机,4条腿,总共有12个电机,也就是我们通常所说的12自由度机器狗。 参数数量重量480克大小96 mm O.D, 40mm axial length最大扭矩17 N m连续扭矩6.9 N m最大转速40 rad/s @ 24V最大功率+250/-680 瓦电流4.5kHz @ 4.5 N m, 1.5kHz @ 17 N m 关节结构模块化的关节电机,如下图。 关节电机拆解后的机构。 可以看到,为了增加扭矩,电机增加了行星齿轮组,并且电机驱动器也一并组装进电机盒。
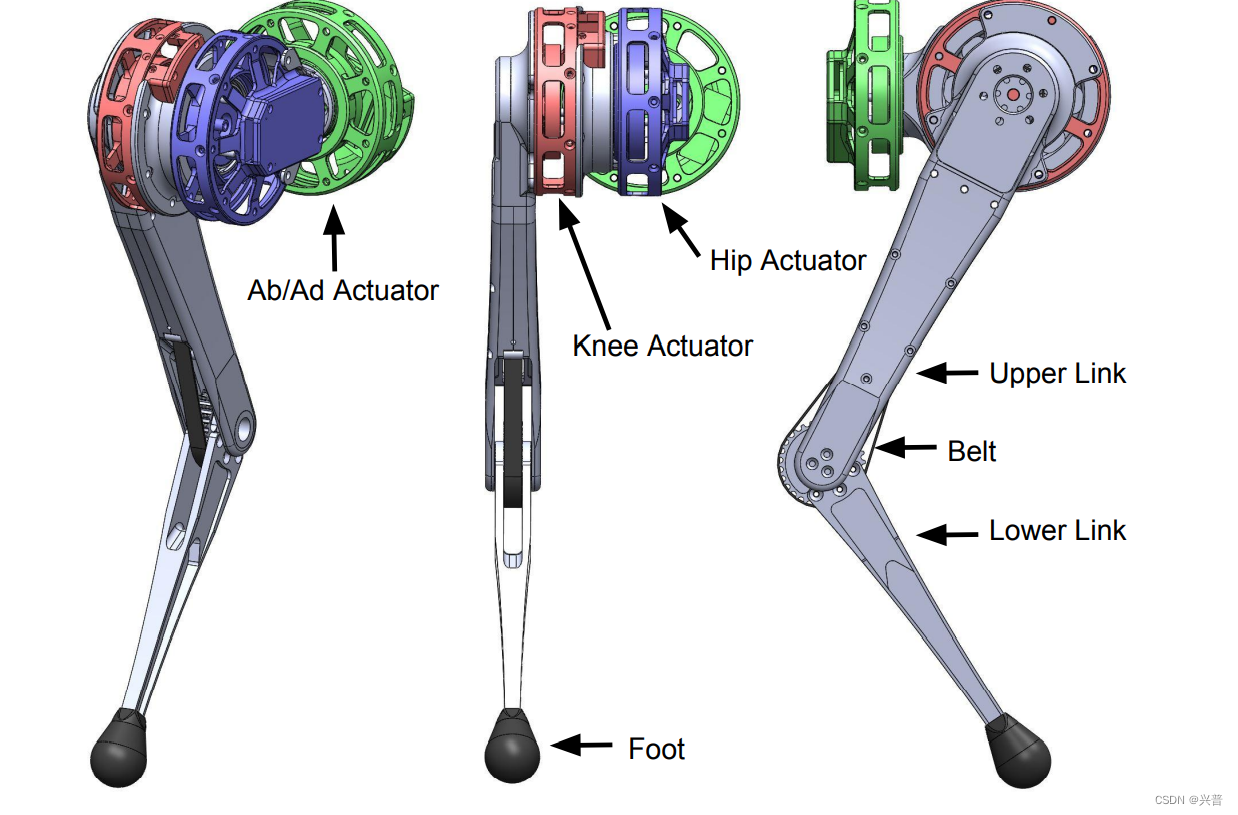
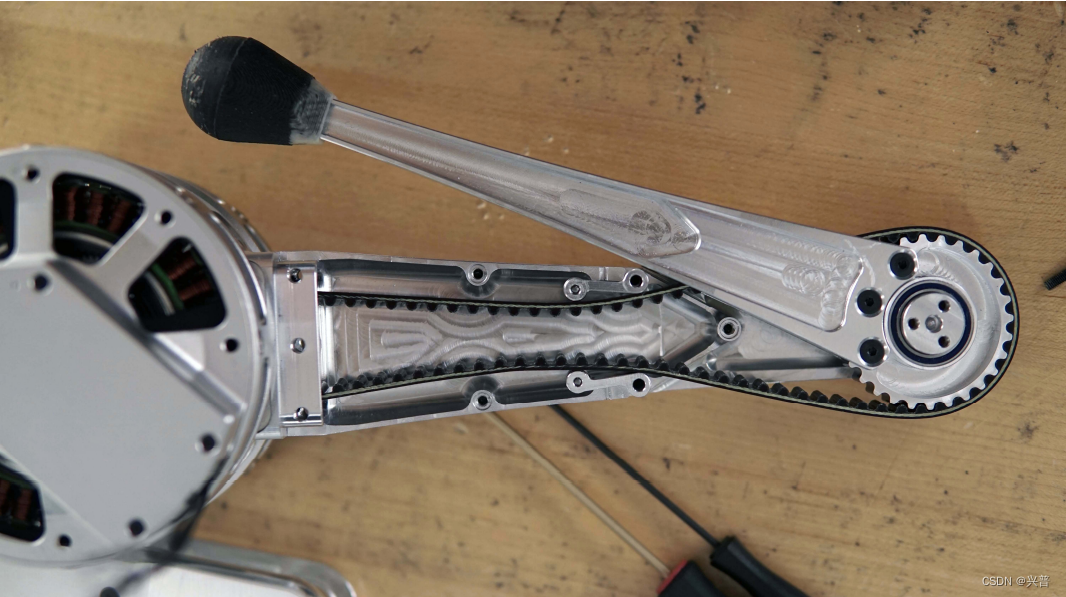
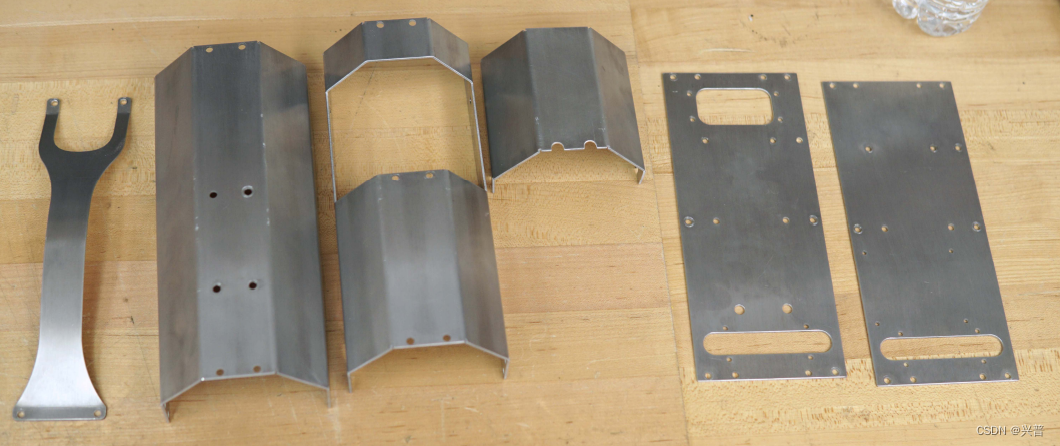
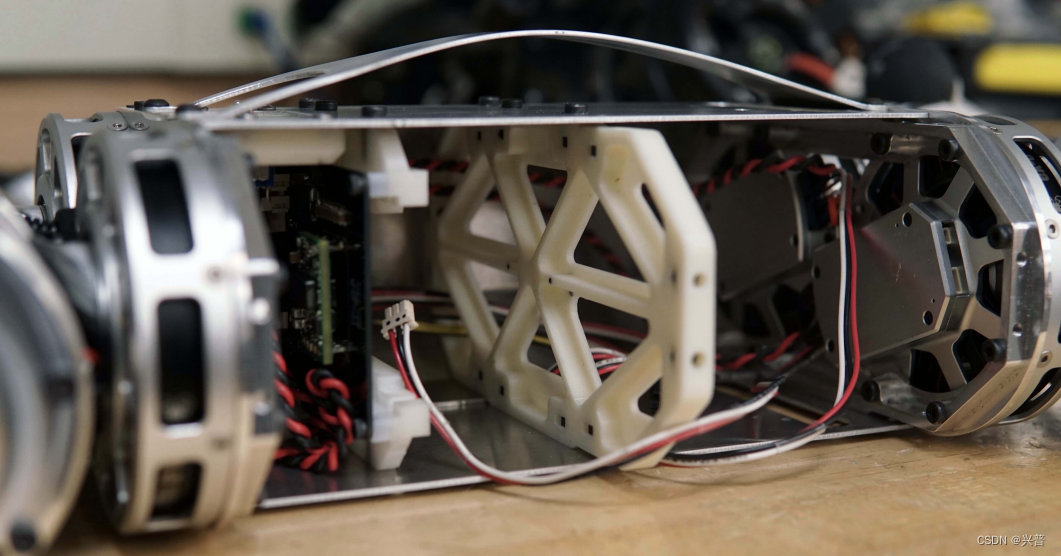
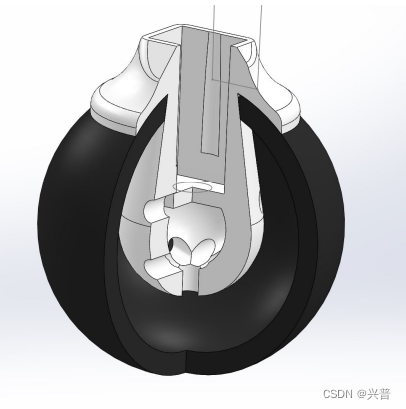
猎豹机器狗的整体设计如下图,金属气息浓厚。 腿部关节的设计。 每条腿部有3个电机,3个电机全部位于上关节处,这是为了能够减轻下腿的重量,方便机器狗可以灵活跳动。 下腿部使用皮带带动。 身体使用厚度为1.5mm的6061硬铝制作。 身体内部装有总线驱动板和小电脑。 脚部安装有橡胶球。
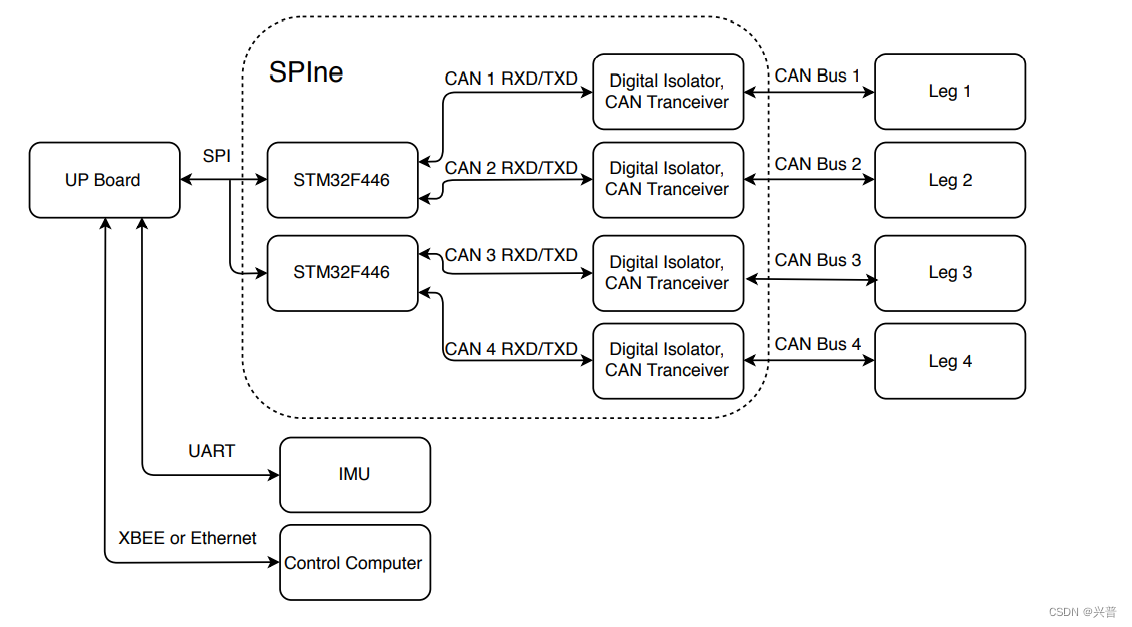
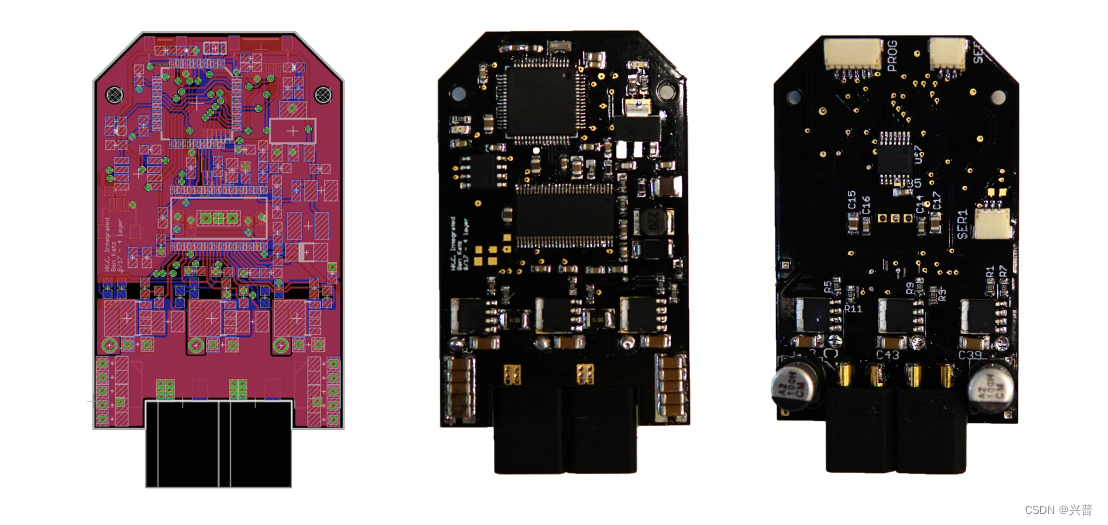
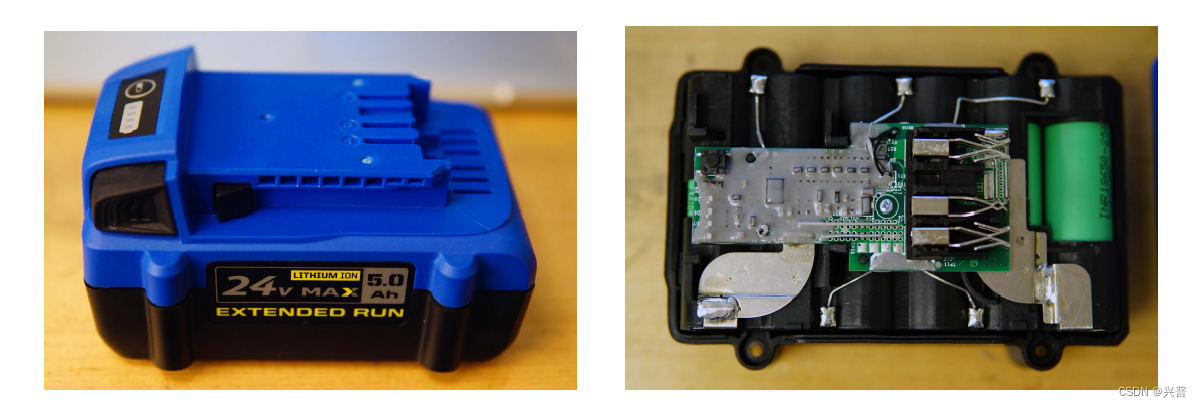
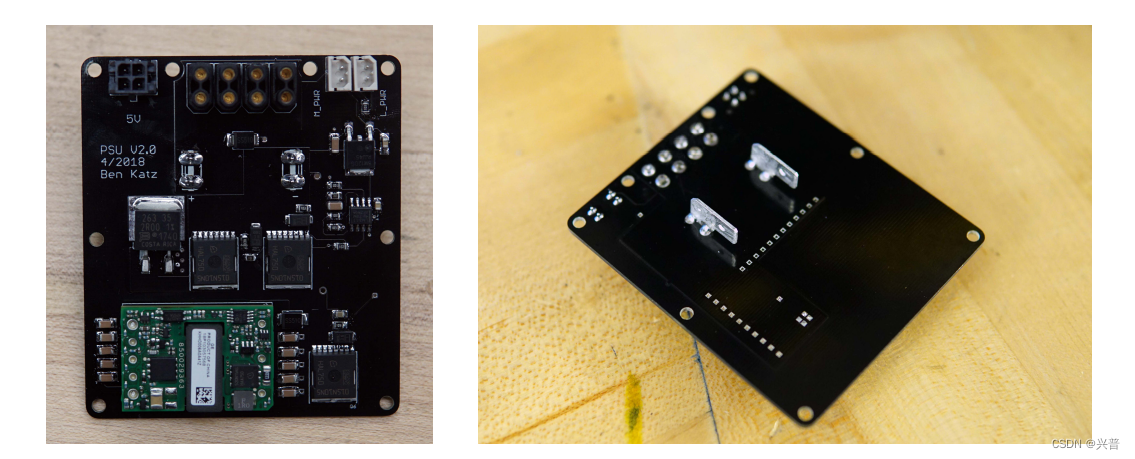
有2个总线通信板SPINE,每个SPINE负责与两条腿通信,每条腿有3个电机,每个电机都有一个关节驱动器。 SPINE与电脑连接,电脑中安装控制系统,原设计使用的是UP Board的小电脑,实际上我们可以使用树莓派4B或者Jetson Nano, Jetson TX2替代。 关节驱动器,使用FOC技术对电机进行控制。 每个电机都需要1个驱动器,驱动器安装在每个电机的电机盒中。 总线驱动板SPINE,总共需要2个SPINE,每个SPINE控制两条腿。 使用18650电池,组装成24V 5Ah的电池组。 电源板,输出5V电压,供电给电机和控制板。 MIT Mini 猎豹,相对于以前的版本和波士顿机器狗,成本都大幅下降,普通玩家基本可以接受。 相关电路板,程序资料可以自行在群文件中下载 Q 760101443 下载最新的控制系统源代码。 编译代码。 mkdir build cd build cmake .. ./../scripts/make_types.sh make -j4安装并运行控制系统。 1. 创建文件夹 $ mkdir mc-build 2. 创建可执行程序 $ cd mc-build; cmake -DMINI_CHEETAH_BUILD=TRUE ..; make -j 3.接入网络,并且可以使用ssh进入机器狗的嵌入式系统电脑。 3. 把编译好的系统传输到机器狗 $ ../scripts/send_to_mini_cheetah.sh 4. 使用ssh登录机器狗 5. 进入系统文件夹 $ cd robot-software-.... 6. 运行控制程序 $ ./run_mc.sh 人工智能以上,已经可以控制机器狗进行任何动作,不过如果想要机器狗能下楼梯,走不平的路,更加流畅的运动,就需要机器狗可以自我学习,不断进化。这就需要训练模型,给机器狗按上人工智能的大脑。 首先,下载源代码。 安装 pytorch 1.10 和 cuda-11.3 pip3 install torch==1.10.0+cu113 torchvision==0.11.1+cu113 torchaudio==0.10.0+cu113 -f https://download.pytorch.org/whl/cu113/torch_stable.html安装 Isaac Gym 1. 下载并安装Isaac Gym Preview 3 地址 https://developer.nvidia.com/isaac-gym $ tar -xf IsaacGym_Preview_3_Package.tar.gz 2. 安装python包 $ cd isaacgym_lib/python && pip install -e .安装系统 $ pip install -e .训练模型 python scripts/train.py评估模型 python scripts/play.py |

 另外搜集到一些3D打印资料已分享到群文件,可自行下载,Q 760101443
另外搜集到一些3D打印资料已分享到群文件,可自行下载,Q 760101443



【本文地址】
今日新闻 |
推荐新闻 |