机械结构篇之四足机器人腿部结构 |
您所在的位置:网站首页 › 机器人的关节分为几种类型 › 机械结构篇之四足机器人腿部结构 |
机械结构篇之四足机器人腿部结构
|
欢迎关注微信公众号 “四足机器人研习社”,本公众号的文章和资料和四足机器人相关,包括行业的经典教材、行业资料手册,同时会涉及到职业知识学习及思考、行业发展、学习方法等一些方面的文章。 目录 1.四足机器人腿部机构概述 2.足式机器人腿部设计要点 3.四足机器人足端 1.四足机器人腿部机构概述足式机器人的出现,使得机器人通过复杂地形的能力大大提升。与一般的轮式机器人相比,其灵活性也大大增加。例如在越障中,轮式机器人往往难以跨越比自身车轮半径高的障碍物,或者通过复杂地形时容易出现“嵌顿”现象而失效,而足式机器人通过合理的结构设计和步态规划却可以轻松跨越各种具有挑战性的地形。 尽管在不平度远小于车轮半径的起伏路面上,轮式机器人可以通过充气轮胎或其他弹簧阻尼系统的隔振,来保证机器人运动的平稳性和速度但在不平地面上行驶时,轮式运动的能耗大大增加。而在障碍环境下,轮式结构的越障能力与障碍物的尺寸大小有关,轮式机器人一般能越过小于车轮半径的障碍,在摩擦力足够大的情形下可以勉强越过车轮半径大小的障碍物,但是由于牵引力很大程度上依赖于重力,在松软地面和严重崎岖不平的恶劣地形上,车轮的作用将严重丧失。 腿足式移动方式是采用了类似人、兽或昆虫用脚迈步移动的运动方式,它的主要特点是只需要断续、离散的着地点,既能在坚硬平地上行走,也能在凹凸不平和松软的地面行走,跨越沟壑与障碍物,上下台阶,到达一些轮式和履带式车辆难以到达的禁区,具有广泛的地形适应性。足运动方式还可以保证机身运动轨迹与足运动轨迹解耦,起到主动隔振的功效,使得行走地面的高低不平不会影响到机身的平稳运动。通常情况下步行系统对波长小于两倍腿行程的地面不平度没有响应,对较大波长的地形变化影响则可通过控制机体的姿态加以过滤。足式移动机器人由于结构复杂,而且难以控制。与其它机构在坚硬平坦地面上行进时相比,它在很高的能量消耗下却只有很小的移动速度,效率较低。但是在崎岖松软的地表上行走时,步行系统却具有良好的能耗特性。 由于轮式、履带式、腿足式在地形适应性能和运动能力上各有特色,于是一些综合了腿关节式和轮式、履带式特点的混合式移动机器人开始出现在各种应用场合,显示了优越的地形适应性能,大大提高了传统轮式、履带式移动机器人的越障运动能力,降低了步行机器人的控制复杂性。但是混合移动方式机器人行进过程中仍然要和地形之间发生连续的接触,相比两足步行机器人,在障碍丛生的环境中移动,其本体的运动平稳性和能量消耗还是有所差距。
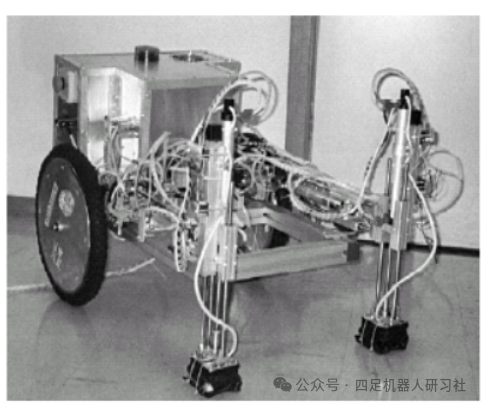
图,一种轮腿混合机器人 早期的足式机器人采用一定结构的连杆来生成机器人所需的运动,这种机构一般是单自由度的。单自由度腿部无疑大大降低了足式机器人的运动规划和控制难度,然而上帝是公平的,这种简单的腿部机构也使得其无法完成复杂的运动:一旦机构确定下之后,其末端往往只能生成有限的运动轨迹,这使得机器人的灵活性非常有限。
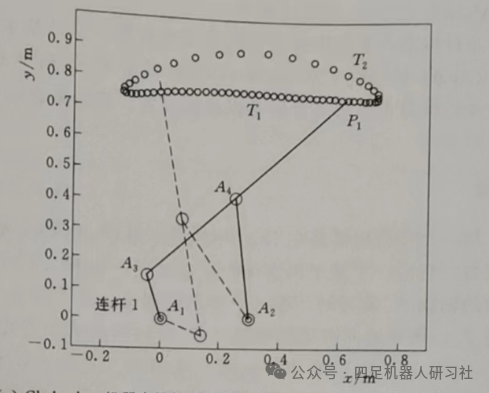
Chebyshev机器摆动轨迹
单自由度腿
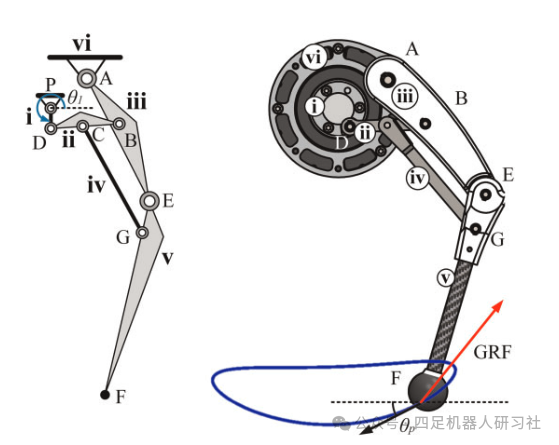
为了应对更复杂的作业环境的挑战,足式机器人单腿往往需要三个自由度(对于成本敏感的小型四足机器人,有些只采用两个自由度:即髋关节摆动自由度和膝关节的屈伸,采用舵机进行驱动。
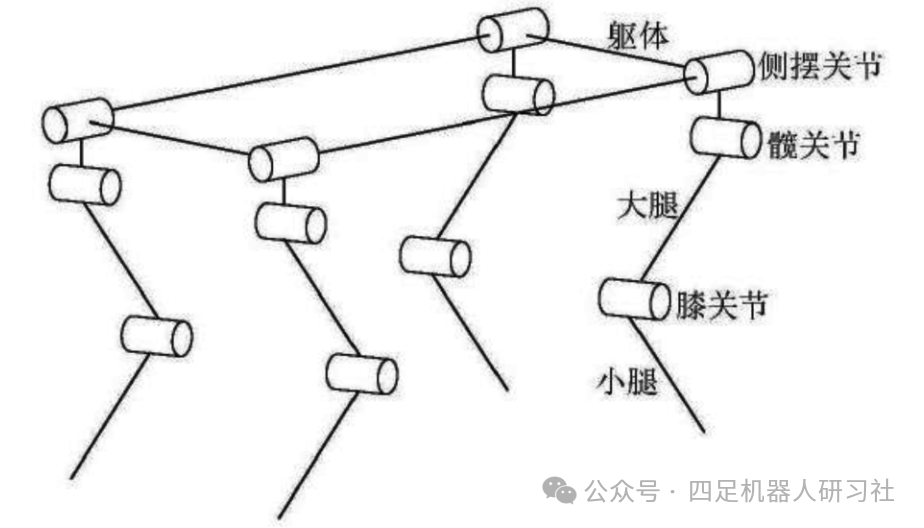
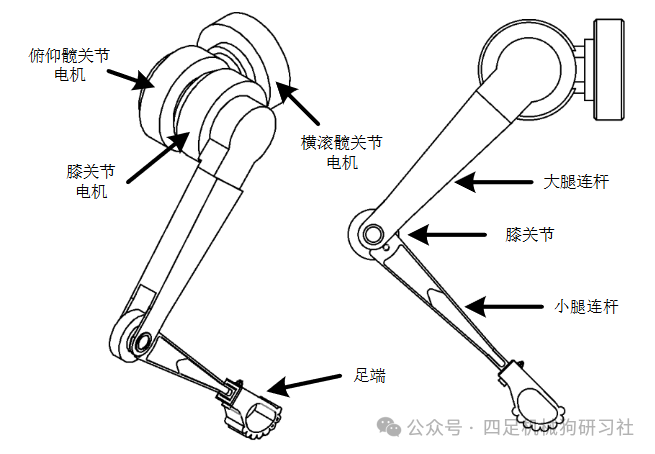
三自由度腿 从仿生角度来说,三自由度足式机器人一般有两种配置形式,如上图所示,大体型四足机器人一般采取哺乳动物式结构。该结构中,机器人腿部第一个关节轴线与躯干的纵向方向平行,此关节作为髋关节,用于实现腿部的侧向迈跨。其余关节轴线与髋关节轴线垂直,同时平行于躯干横向方向,用于实现腿部的弯曲和伸展。而爬行动物式四足机器人结构较为简单。其髋关节轴线与躯干所在平面垂直用于实现腿部的摆动。腿部其余关节轴线与髋关节轴线垂直,且与躯干所在平面平行,用于实现腿部的弯曲和伸展。爬行动物式四足机器人,一般比较矮小,适用于中小型四足机器人。其竖直方向上腿部工作空间较小。相较哺乳动物式四足机器人,其越障能力较差、运行速度较慢。但其重心较低,足端围成的支撑多边形面积较大,因而具备更强的稳定性。本文以哺乳动物式结构为例进行说明。 2.足式机器人腿部设计要点1.四足机器人关节往往采用关节电机直接驱动,因为过多的传动虽然提高了传动比,降低了腿部动力学对轨迹的影响,然而传动的增加往往使得系统中间隙、摩擦和弹性显著增加,这些额外的影响往往比机械部件的动态模拟更难。因此应尽量减少中间传动,合理设计减速比。 2.如果腿部质量占比较大,通常情况下,腿部需要通过使用高减速比齿轮传动,通过降低速度来增加输出转矩,因此会使得腿部运动较慢。降低腿部惯性有利于提高四足机器人的响应的快速性,同时,当腿部质量远低于质心的时候,这部分惯性对机体运动影响大大降低,可以简化机器人的动力学模型,降低控制的复杂性。因此应尽量降低腿部惯性,将质量集中在靠近躯体部分。 由于腿部结构对机器人的运动性能有着巨大的影响,所以设计腿部结构时最大限度的减少腿的质量以及最大限度的扩大腿部的活动范围;除此之外,要求腿部达到必要的强度和刚度,使得四足机器人能够完成快速奔跑和后空翻等高难度 动作。下图为 CAD 绘制的腿部结构示意图,从图中可以看出腿部采用了串联 结构,驱动小腿连杆的膝关节电机没有放置在膝关节位置,而是放置在俯仰髋关 节电机同轴位置,并通过同步带连接小腿连杆传递动力,这最大限度减少了膝 关节的质量以及运动带来的惯性。较大的腿部活动范围和工作空间在机器人运 动和执行任务过程中可以有效增加腿的效用。所以腿部横滚髋关节外展和内 收角度范围可达±60°,俯仰髋关节向前向后角度范围可达±90°,膝关节可向前 向后旋转±120°,这意味着四足机器人可以向上向下攀爬楼梯而不会与楼梯边缘 碰撞以及跨越较高的障碍物而不会触碰到小腿连杆,也可以使得四足机器人倒 地后能够自行爬起而不需要人为的帮助。
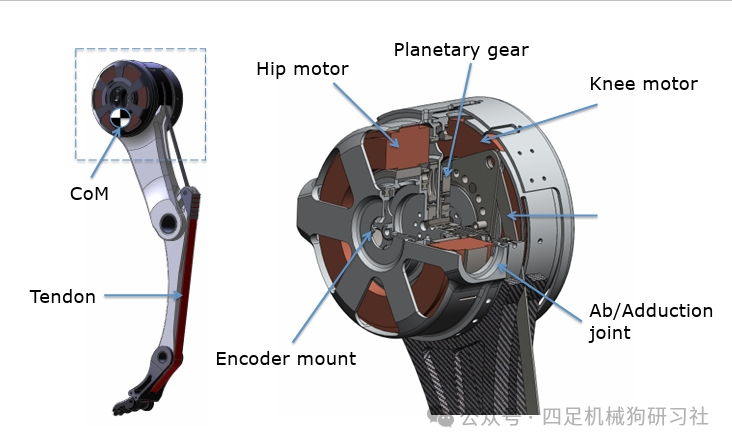
腿部连杆具有质量轻且刚度强的特点,由于小腿连接只承受弯曲载荷,所以 在截面上设计为工字梁,既能达到刚度要求,又减轻了连杆的重量;膝关节连接 端固接一个齿轮,用于连接同步带。大腿连杆要承受弯曲载荷和扭矩,并需要一 个内部空间安放同步带,所以大腿连杆为两部分壳体设计,由两个薄壁部分沿边 缘紧固在一起,形成一个连续的管。机器人身体为中空设计,里面有足够的空间 用以放置电池、微型处理器、电路板等部件。四足机器人结构设计合理,整体轻巧美观。腿部结构不仅刚度强,运动空间 大,而且灵活性高,能够快速响应控制器发出的指令,完成高速奔跑、跳跃和后空翻等高难度动作。 麻省理工学院猎豹前腿设计的实体模型机器人。腿的设计是为了最大限度地提高控制的稳定性。腿的转动惯量是最小的定位所有驱动部件在肩部。腿的质心定位 肩关节旋转中心以下3cm处。
下图的狗子除了将腿部质量集中在躯体处之外,为了提高运动效率,增加了弹性执行元件。 足式机器人的固有问题是“低能效”和“速度慢”。根据生物学观察,更快的跑步速度是通过更长的步幅来实现的(Lstride)腿部运动不快(fstride)力越大,步幅越长 。然而,更大的力意味着与地面的能量相互作用更大。它伴随着能量耗散大和低能效。此外,足式机器人使用“行走”,这是几种运动(飞行、游泳、步行)中效率极低的形式,因此提高能源效率是腿机器人的重要问题。 一些研究试图使用三种主要方法提高腿式机器人的性能和效率:被动动力学、直接驱动驱动(或具有机械透明的小减速比)和串联弹性执行器(缩写为 SEA)。
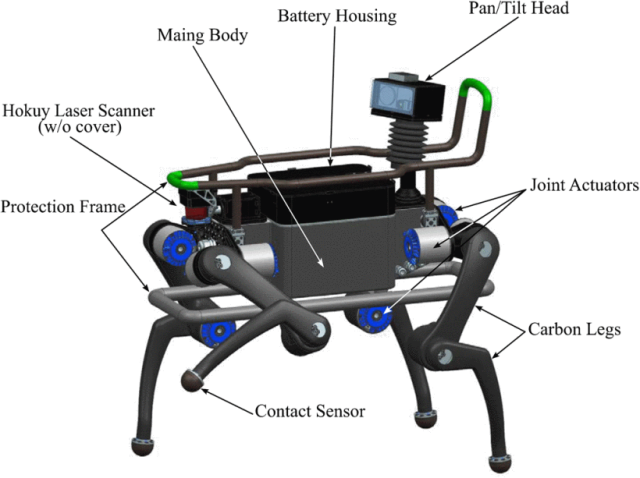
下图是著名的ANYmal 四足机器人,ANYmal 的所有关节均可完全旋转,可进行各种配置。作为高机动性的证明,ANYmal 测试了爬上大约 50° 工业梯子的能力。由于小腿采用异形连杆,其小腿结构与足底不在一条直线,动力学模型与传统直线连杆有区别,但这种设计使得其膝关节和小腿活动范围很大,进而整个ANYmal的运动范围很大,腿可以翻过头顶,以防止与地面或侧轨发生碰撞。
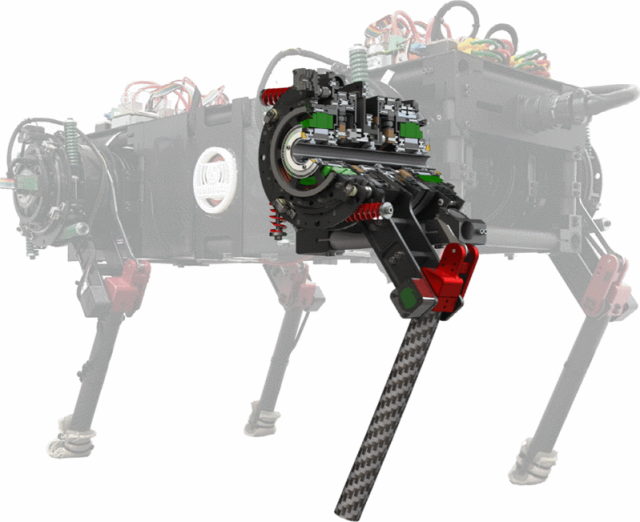
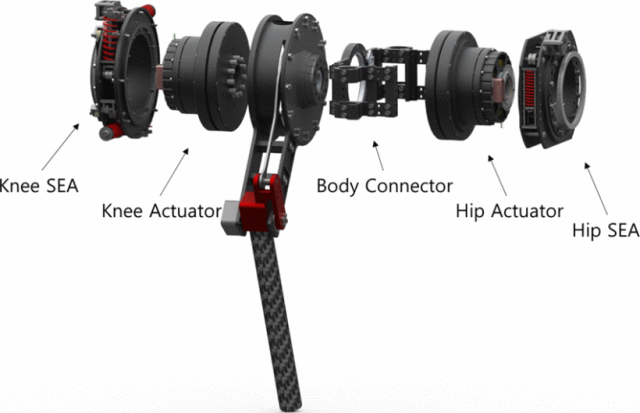
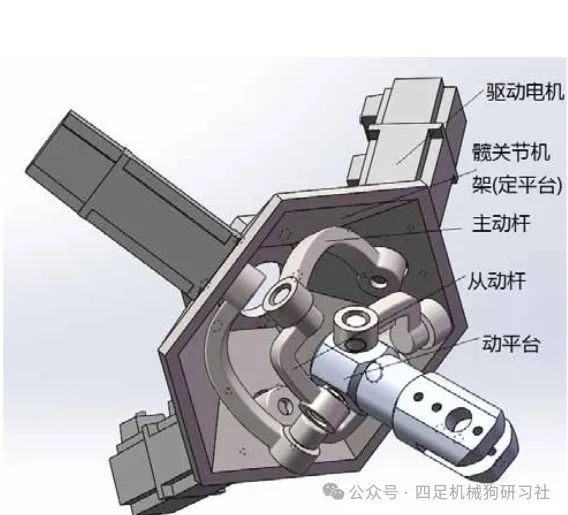
下面这种设计也是将两个髋关节和膝关节的电机集中在一块。髋关节处由三个驱动电机驱动,三个驱动电机都固定在髋关节定平台上, 减轻了该新型四足步行机器人行走时的抬腿惯量,提高了机器人行走的快速性 和稳定性。混联腿部机构的大腿与髋关节的动平台固定连接,小腿与小腿通过 膝关节转动连接,具有一个转动自由度。在膝关节处采用电缸驱动,电缸体通 过铰链与大腿和小腿相互铰接,通过控制电缸的行程控制膝关节的转动角度。这种设计提高了膝关节的中心位置,使得整腿的重心更靠近机器人的运载平台,减小了腿部机构对于髋关节的转动惯量,提高了腿部的运动灵活性。由于该新 型四足步行机器人的每条腿都采用串并混联结构,每条腿都兼有并联机器人整 体刚度大、运动惯量小、运动精度高和串联机器人工作空间大的优点,因此也 使得整机具有更高的承载能力、运动稳定性和更大的工作空间。
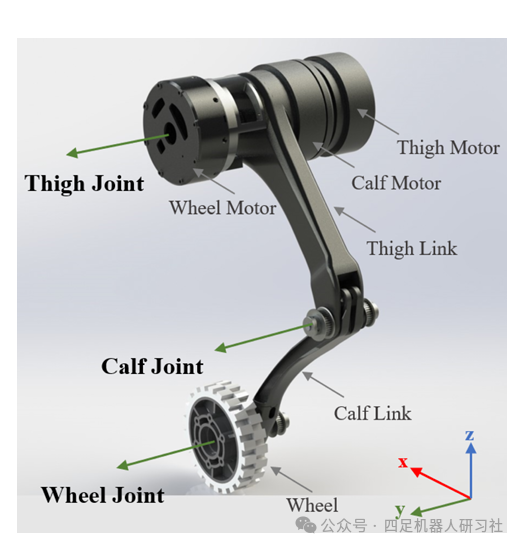
为了进一步挖掘四足的潜力,有的四足腿部配有轮足,甚至还加了一个踝关节的自由度,单腿共五个自由度。轮腿的引入使四足机器人更加灵巧,但也给机器人建模和控制增加了难度。
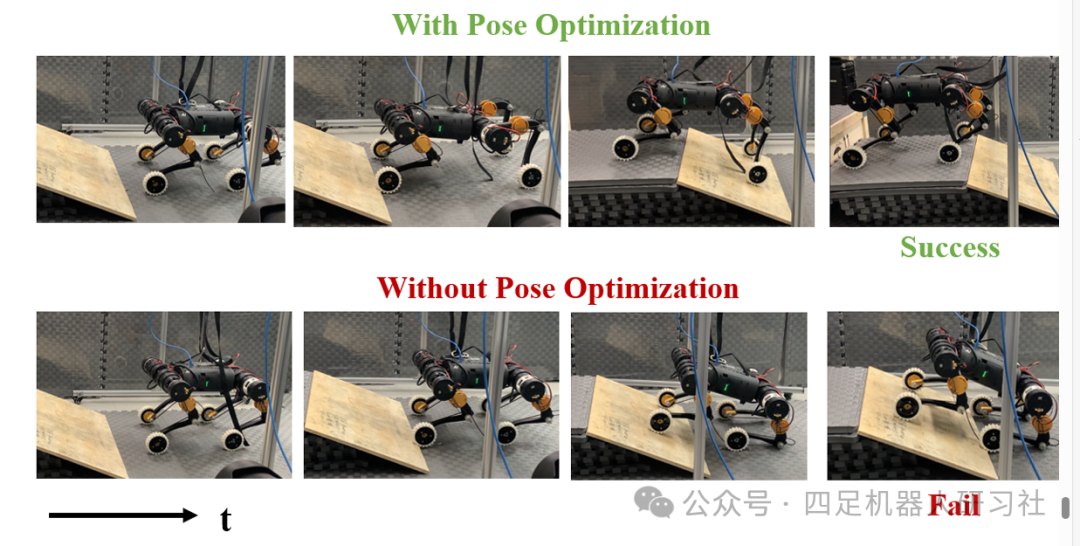
四自由度轮足腿 这种轮足腿的配置使得四足机器人能够攀爬更陡峭的坡度,为足式机器人越障提供了另一种思路。
图,轮腿机器人爬坡越障过程 ANYmal 的轮足机器人,可以做到四足-人形两种不同形态的切换,这无疑大大增加了足式机器人的通过性——毕竟人形重心高,比四足形态更加灵活,可以通过更高的障碍物。而平时四足形态时还能当移动机器人用,与足式机器人不同,移动机器人运动时不需要克服腿部的重力势能,具有更高的能量效率。
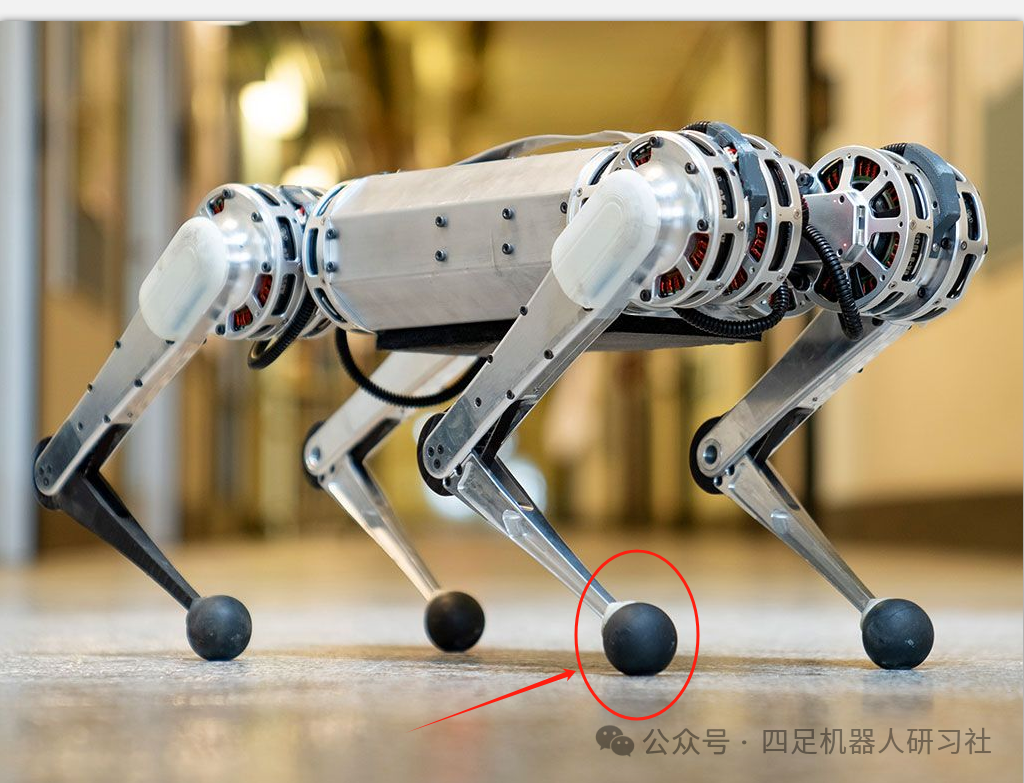
ANYmal 轮足 3.四足机器人足端在机器人腿部当中,足端部分是实际参与地 面接触的部分,合适的足端设计应提供稳定的支 撑面积和良好的地面附着力,以确保机器人在不 同地形和外部力的作用下保持稳定. 目前,足式 机器人的足端形状主要有平面型、半圆型、圆柱 型、仿生型这四大类,材质多为橡胶材料、聚合物 材料、金属材料、3D打印材料。 平面型足端接触面积较大,能够提供较大的附着力,承重能力较强 ,但缺点在于适应性不高,在复杂地形下,容易造成机器人行走不稳。 半圆形(球形)足端与地面是点接触足端,地形适应性较强,在复杂地形环境中应用 ,不足之处是在山区类地形中,足端与地面接触面小,导致附着力性能差,容易打滑。 圆柱形足端与地面是线接触足端,复杂地形适应性好,且结构简单,但是 缺点在于与地面线接触,容易导致接触面积不够,大斜度地面容易打滑。 仿生形足端优点:进行仿生设计,通过模仿各类行走时附着性能高的动物足端,提高对复杂环境的适应性 。缺点:仿生型足端,结构较复杂,耐久性仍需验证。
cheetah球形足端
平面足端
仿生羊蹄足端
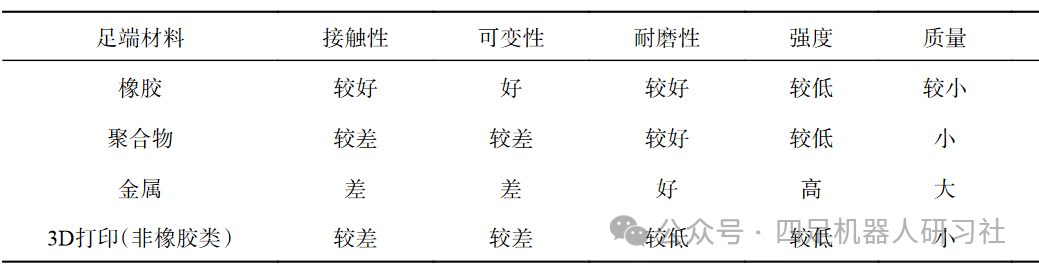
不同足端材料特点 参考文献: [1]吴宇飞. 基于足端触地驱动四足机器人步态实时规划及控制算法设计[D].南昌大学,2022.DOI:10.27232/d.cnki.gnchu.2021.001871. [2]S. Seok, A. Wang, D. Otten and S. Kim, "Actuator design for high force proprioceptive control in fast legged locomotion," 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems, Vilamoura-Algarve, Portugal, 2012, pp. 1970-1975, doi: 10.1109/IROS.2012.6386252. [3]Y. H. Lee et al., "Development of torque controllable leg for running robot, AiDIN-IV," 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 2017, pp. 4125-4130, doi: 10.1109/IROS.2017.8206271. [4]M. Hutter et al., "ANYmal - a highly mobile and dynamic quadrupedal robot," 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Daejeon, Korea (South), 2016, pp. 38-44, doi: 10.1109/IROS.2016.7758092. [5]Yujiong Liu, Pinhas Ben-Tzvi, Dynamic Modeling, Analysis, and Design Synthesis of a Reduced Complexity Quadruped with a Serpentine Robotic Tail, Integrative and Comparative Biology, Volume 61, Issue 2, August 2021, Pages 464–477, https://doi.org/10.1093/icb/icab083 [6]姜晓勇,应凯健,吴起威等.足式机器人触地检测方法的研究综述[J].浙江大学学报(工学版),2024,58(02):334-348. |






【本文地址】
今日新闻 |
推荐新闻 |