嵌入式毕设分享 STM32智能语音控制家政机器人(源码+硬件+论文) |
您所在的位置:网站首页 › 智能机器人保姆多久能实现的 › 嵌入式毕设分享 STM32智能语音控制家政机器人(源码+硬件+论文) |
嵌入式毕设分享 STM32智能语音控制家政机器人(源码+硬件+论文)
|
文章目录
0 前言1 实现内容2 硬件设计3 软件设计3.1 安卓端3.2 小车端
4 实现效果5 最后
0 前言
🔥 这两年开始毕业设计和毕业答辩的要求和难度不断提升,传统的毕设题目缺少创新和亮点,往往达不到毕业答辩的要求,这两年不断有学弟学妹告诉学长自己做的项目系统达不到老师的要求。 为了大家能够顺利以及最少的精力通过毕设,学长分享优质毕业设计项目,今天要分享的是 🚩 毕设分享 STM32的智能家政机器人(源码+硬件+论文) 🥇学长这里给一个题目综合评分(每项满分5分) 难度系数:3分工作量:4分创新点:4分🧿 项目分享: https://gitee.com/sinonfin/sharing
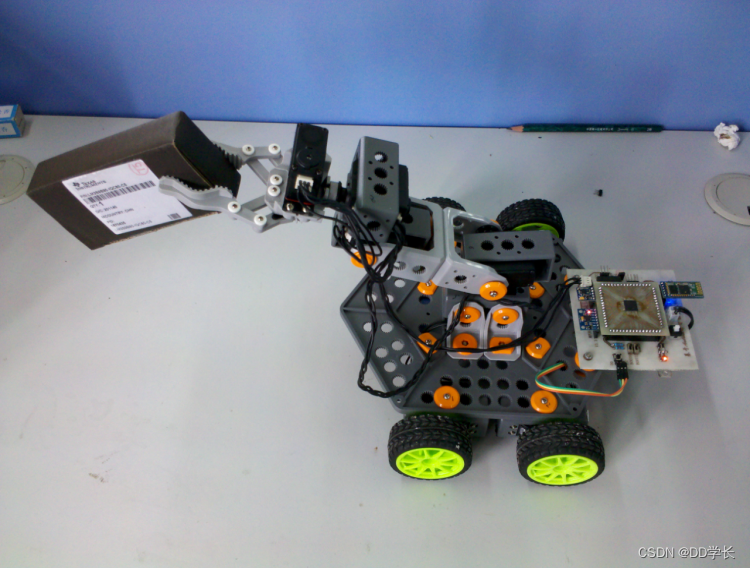
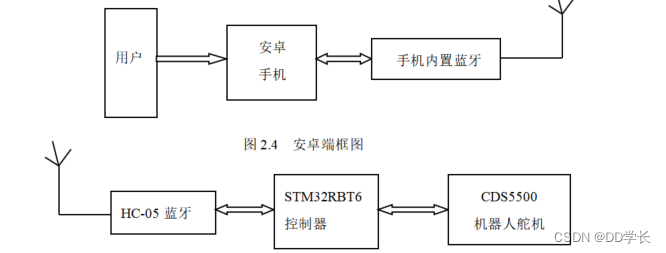
(1)家政服务机器人要求为移动车体,具有机械手; (2)基于“安卓”实现简单语音识别; (3)实现机械手臂简单操作; (4)通过蓝牙实现“安卓”对机器人的无线控制; (5)实现自动定位。 作为语音识别系统,当需要对输入语音信号进行识别时,如果不能对于大部分人群进行准确识别,将大大降低系统的实用性。只有对于普通话发音进行准确识别,才可以得到广泛的应用。 本系统通过在安卓平台调用Google Voice Search引擎实现了此功能,通过这种方式,可以准确识别语音输入命令,大大的提供了系统的性能。同时,上位机通过识别说话人的语音信息,将此信息通过蓝牙模块发送至下位机。通过下位机控制机器人的动作,可使机器人进行前后左右的移动和手部的动作。 2 硬件设计通过系统方案的分析,并结合实际需求我选择语音识别方案二和自动定位方案二作为系统设计方案。这是由于在本系统中,我们可以在安卓平台通过使用Google Voice Search引擎很方便的实现对家政机器人的语音控制。同时,安卓平台也能够很方便的通过蓝牙与机器人进行通信。本系统的安卓端控制软件可以运行在任何安卓手机,故基于本系统有很强的通用性。本系统的安卓端、机器人端结构框图如图所示。通过图中所示,可以对系统有个大致了解。
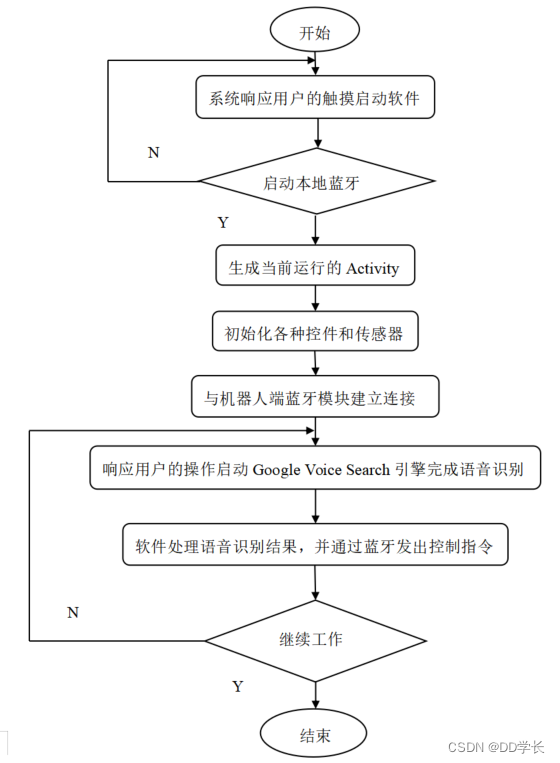
本系统中安卓端软件为运行在操作系统中的软件,这就需要我从操作系统的层面来考虑软件的内部架构,以使得软件能够在启动操作系统后所剩无多的资源下高效的运行
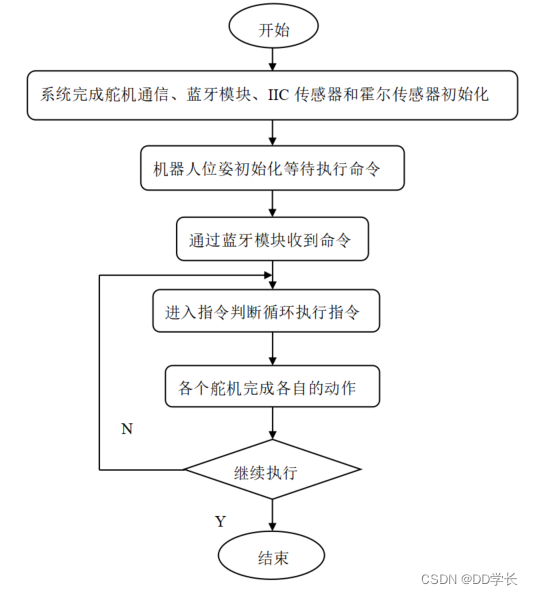
机器人端程序主要实现通过HC-05蓝牙模块接收用户的指令,然后控制机器人完成相应的动作。在程序运行过程中还要涉及到各个模块和传感器的初始化,以及各个模块与控制器的实时通信。
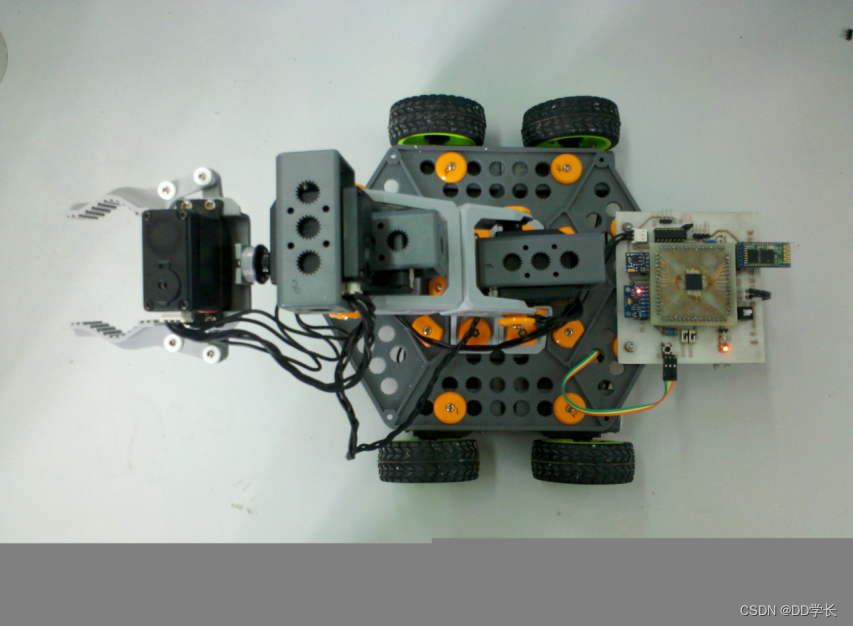
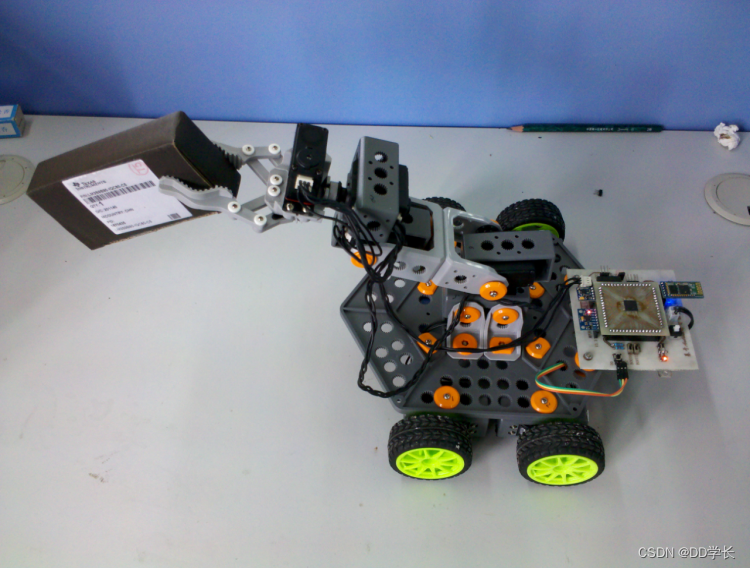
下图为机器人正常启动之后的效果图
下图为安卓端软件正常启动后效果图
🧿 项目分享: https://gitee.com/sinonfin/sharing |

【本文地址】
今日新闻 |
推荐新闻 |