【项目实战】基于STM32单片机的智能小车设计(有代码) |
您所在的位置:网站首页 › 智能小车循迹实验报告 › 【项目实战】基于STM32单片机的智能小车设计(有代码) |
【项目实战】基于STM32单片机的智能小车设计(有代码)
|
【1】背景意义
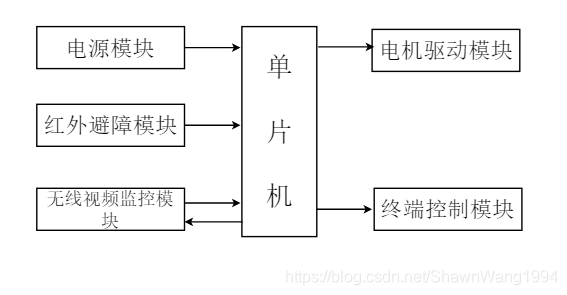
近些年随着国民生活水平的提升,以小车为载体的轮式机器人进入了我们的生活,尤其是在一些布线复杂困难的安全生活区和需要监控的施工作业场合都必须依赖轮式机器人的视频监控技术。因此,基于嵌入式技术的无线通信视频监控轮式机器人应运而生。由于它们与人类工作相比具有成本低廉、安全稳定的优点,目前已经在许多危险作业以及工业场合得到了广泛应用而且轮式机器人不需要像人那样采取过多的保护措施,因此轮式机器人更适合在危险困难的工作环境中工作。然而轮式机器人在行驶中所能碰到的障碍很多,例如前部凸出物的碰触,后部凸出物的拖托,中部凸出物的顶举,特别还有垂直障碍和壕沟等,所以必须对轮式机器人的越障问题进行研究来解决类似问题。 针对复杂地形环境的巡检作业,设计一种基于wifi视频监控的智能小车。基于STM32F103主控板搭建智能小车的控制系统,并采用模块化的设计思想编写控制系统程序,为能够在复杂地形下进行巡检作业的轮式机器人研究提供理论依据。 【2】总设计方案本课题利用STM32作为智能小车的主控制器来驱动智能小车的直流电机工作,电机驱动芯片采用L298N微型集成电路电机驱动芯片,配合STM32核心板使用实现四个直流电机运行和pwm软件调速,通过改变直流电机占空比的电压来改变平均电压的数值,从而改变电机的转速变化来驱动轮式机器人运行。轮式机器人行驶的状态有:前进、后退、左转、右转和停止。当轮式机器人在行驶过程中遇到障碍物,红外避障检测模块检测周围障碍物,轮式机器人自动停止或转向。通过WIFI无线信号作为传输媒介,以上位机或手机作为控制端来控制机器人的运动以及将摄像头所拍摄的视频信息在控制端界面中显示,这样便可观察轮式机器人周围的环境并对机器人进行实时监控。主要设计步骤有: (1)根据提出方案的功能需求对智能小车进行结构设计。 (2)根据主控制器的基本结构和特点,设计总体硬件电路模块。总体硬件电路模块的设计包括电机驱动电路设计、红外避障电路设计、无线传输电路设计等。 (3)选择符合系统设计需求的系统软件,并在该软件的基础上编写驱动代码和应用软件代码。针对系统功能的具体要求,从系统信号稳定传输的角度出发,对电机驱动、调速、无线路由器系统的改造、视频信息的接受与发送、红外避障模块的改造和控制端界面的设计等进行详细的分析与设计,并完成代码的编写与调试。 (4)把硬件开发板和软件平台结合起来,对视频监控智能小车整个系统进行了整体测试。对测试中出现的问题进行相关的改进工作,进一步提高系统工作的可靠性和稳定性。 【3】结构设计根据提出方案的功能需求,对轮式机器人的整体结构进行设计,采用双面覆铜加硬的PCB板料作为轮式机器人的底盘,其优点是:不易变形、不易折断、轻量化、不易造成短路;选用抗干扰TT马达,其加入压敏抗组的转子可抵抗电机突然启动产生的火花干扰,避免触发信号错误,可有效降低马达启动噪音,并在启动时可提供更大电流,使马力更强;使用航模级抗滑橡胶轮胎内带海绵表面平整不易变形,在避障行走时刹车不易撞上障碍物。马达用马达锁片固定到机器人底盘上,轮子通过轴与马达相连。 硬件系统主要由单片机主控模块、电源模块、电机驱动模块、红外避障模块控制终端模块和无线视频监控模块组成。硬件系统框图如图: |

 其余硬件设备均固定到机器人底盘上,包括电池座、红外避障传感器、wifi模块、摄像头、STM32单片机主控模块和L298N电机驱动芯片。机器人底盘俯视图示意图如图:
其余硬件设备均固定到机器人底盘上,包括电池座、红外避障传感器、wifi模块、摄像头、STM32单片机主控模块和L298N电机驱动芯片。机器人底盘俯视图示意图如图: 
 (1)主控模块 主控模块采用STM32F103为主控制器,STM32F103属于中低端的32位ARM微控制器,该系列芯片是意法半导体(ST)公司出品,其内核是Cortex-M3。该系列芯片按片内Flash的大小可分为三大类:小容量(16K和32K)、中容量(64K和128K)、大容量(256K、384K和512K)。芯片集成定时器,CAN,ADC,SPI,I2C,USB,UART,等多种功能。STM32F103可使用keil C语言编译,支持STLink-SWD在线调试,主要用于收集信息、处理数据、协调系统中的每个功能模块预计要完成的任务。
(1)主控模块 主控模块采用STM32F103为主控制器,STM32F103属于中低端的32位ARM微控制器,该系列芯片是意法半导体(ST)公司出品,其内核是Cortex-M3。该系列芯片按片内Flash的大小可分为三大类:小容量(16K和32K)、中容量(64K和128K)、大容量(256K、384K和512K)。芯片集成定时器,CAN,ADC,SPI,I2C,USB,UART,等多种功能。STM32F103可使用keil C语言编译,支持STLink-SWD在线调试,主要用于收集信息、处理数据、协调系统中的每个功能模块预计要完成的任务。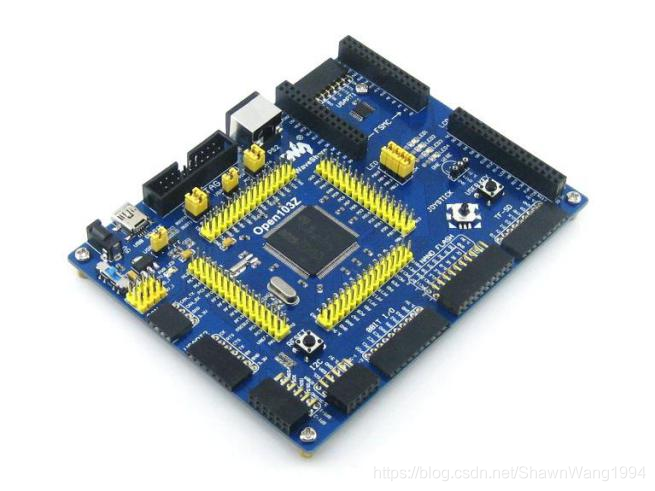 (2)电源模块 电源模块在机器人的运行过程中,需要给单片机、电机、各大模块及传感器供电。为了保证系统的可靠供电,所以选择可充电的18650锂电池,如图3.5所示。**18650是锂离子电池的鼻祖–日本SONY公司当年为了节省成本而定下的一种标准性的锂离子电池型号,其中18表示直径为18mm,65表示长度为65mm,0表示为圆柱形电池。**常见的18650电池分为锂离子电池、磷酸铁锂电池。锂离子电池电压为标称电压为3.7v,充电截止电压为4.2v,磷酸铁锂电池标称电压为3.2V,充电截止电压为3.6v容量通常为1200mAh-3350mAh,常见容量是2200mAh-2600mAh。
(2)电源模块 电源模块在机器人的运行过程中,需要给单片机、电机、各大模块及传感器供电。为了保证系统的可靠供电,所以选择可充电的18650锂电池,如图3.5所示。**18650是锂离子电池的鼻祖–日本SONY公司当年为了节省成本而定下的一种标准性的锂离子电池型号,其中18表示直径为18mm,65表示长度为65mm,0表示为圆柱形电池。**常见的18650电池分为锂离子电池、磷酸铁锂电池。锂离子电池电压为标称电压为3.7v,充电截止电压为4.2v,磷酸铁锂电池标称电压为3.2V,充电截止电压为3.6v容量通常为1200mAh-3350mAh,常见容量是2200mAh-2600mAh。 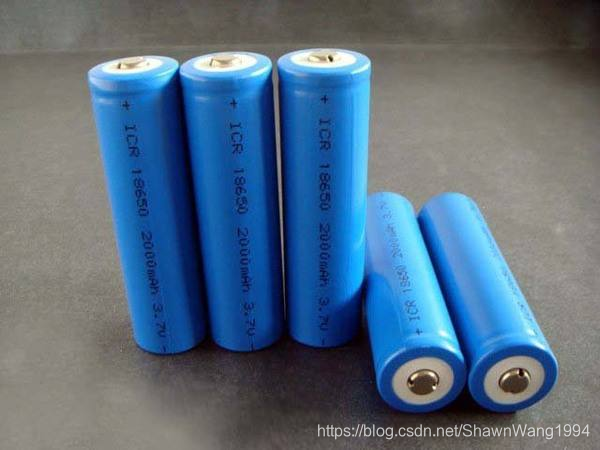 (3)电机驱动模块 电机驱动模块采用L298N为电机驱动芯片,其原理图如图3.6所示。L298N是ST公司生产的一种高电压、大电流电机驱动芯片。该芯片采用15脚封装。主要特点是:工作电压高,最高工作电压可达46V;输出电流大,瞬间峰值电流可达3A,持续工作电流为2A;额定功率25W。内含两个H桥高电压大电流全桥式驱动器,可以用来驱动直流电动机和步进电动机、继电器线圈等感性负载;采用标准逻辑电
(3)电机驱动模块 电机驱动模块采用L298N为电机驱动芯片,其原理图如图3.6所示。L298N是ST公司生产的一种高电压、大电流电机驱动芯片。该芯片采用15脚封装。主要特点是:工作电压高,最高工作电压可达46V;输出电流大,瞬间峰值电流可达3A,持续工作电流为2A;额定功率25W。内含两个H桥高电压大电流全桥式驱动器,可以用来驱动直流电动机和步进电动机、继电器线圈等感性负载;采用标准逻辑电【本文地址】
今日新闻 |
推荐新闻 |