无人驾驶综述:单车智能技术架构 |
您所在的位置:网站首页 › 无人驾驶是怎么做到的 › 无人驾驶综述:单车智能技术架构 |
无人驾驶综述:单车智能技术架构
|
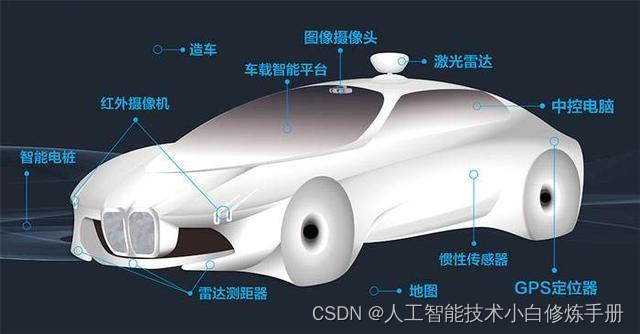
单车智能即通过车辆本身的传感器获取外界信息,通过算法进行处理,自动控制车辆行驶。 单车智能主要通过以下三个部分实现。 环境感知:①在哪(定位)②周围有什么(感知) 预测规划:①周围的交通参与者要做什么(预测) ②应该往哪走(规划) 车辆控制:①控制车辆行驶在规划的路线上(控制) 本章将介绍环境感知的定位方式以及主要的传感器。 1 定位定位是让车知道自己在哪里。而除了最为大众熟知的GPS,车辆的定位还需要结合惯性导航来达到厘米级别的定位精度。 1.1 GPS全球定位系统(Global Positioning System,GPS)是一种以人造地球卫星为基础的无线电导航的定位系统。通过三角测量方式定位当前位置。它在全球任何地方以及近地空间都能够提供目标的地理位置、车行速度及时间信息。 但是GPS定位系统存在定位精度和更新频率的问题。GPS只能提供精度1m到3m的位置信息,这对于无人驾驶车辆来说仍然不够。在高楼山脉环绕的地方等信号弱的地区,精度会更低。同时它的更新频率较低,大概10Hz,而在无人驾驶领域中,信息更新频率需要达到50Hz以上才能满足需求。 1.2 惯性导航惯性导航利用惯性测量单元(Inertial Measurement Unit,IMU)通过汽车的初始速度、加速度和初始位置计算汽车的位置和速度。IMU由加速度计和陀螺仪构成,它可以测量汽车的运动形态和姿态,比如汽车以恒定速度运动,如果知道汽车的起始位置、速度和行驶时长,就可以知道汽车的位置。 IMU更新频率高,但更新过程存在误差累积,因为位置信息和姿态信息是积分求得的。而GPS的每次更新不存在误差累积,因为每次信息不依赖于上一次的值。因此两者可以实现互补,通过GPS实现长时间定位,在GPS两次位置更新中间可以采取IMU进行定位,从而实现较为准确的实时定位。 2 感知一位优秀的驾驶员应该能够做到耳听六路,眼观八方。在这个过程中,驾驶员就是在感知道路环境。相应的,无人驾驶车辆通过车载传感器来实现“听”和“看”。其中“看”,就像人类司机一样,承担了绝大部分的感知任务。感知通常依赖摄像头、毫米波雷达和激光雷达“看到”信息,依赖听觉传感器“听到”信息。通过获取的信息帮助无人驾驶车辆“理解”道路环境,从而进行预测和规划。
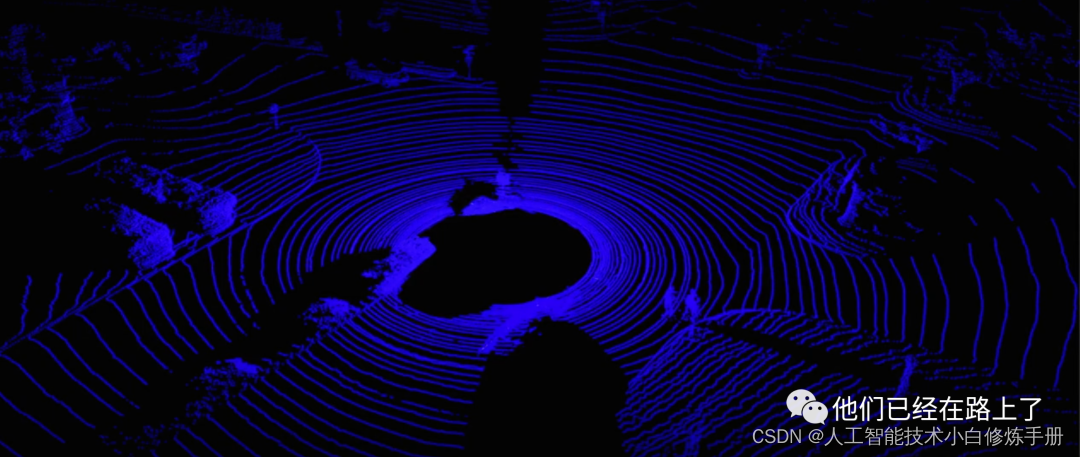
摄像头(Camera)采集图像,将图像转换为二维数据。对采集的图形进行模式识别,通过图像匹配算法识别行驶过程中车辆、行人、交通标志等。依据目标物体的运动模式或使用双目定位技术,以估算目标物体与本车的相对距离和相对速度。 人类在驾驶过程中所接收的信息大多来自视觉,例如交通标志、 道路标志、交通信号等,这些视觉信息成为人类驾驶员控制车辆的主要决策依据。相较于其他传感器,视觉传感器安装使用的方法简单、获取的图像信息量大、投入成本低、作用范围广,并且近些年更是受益于数字图像处理技术的快速发展和计算机硬件性能的提高。 但是在复杂交通环境下,视觉传感器依然存在目标检测困难、图像计算量大、算法难以实现的问题,视觉感知技术在应对道路结构复杂、人车混杂的交通环境时也还存在很多不足。并且基于视觉的感知技术受光线、天气影响较大,在恶劣天气和类似于隧道内的昏暗环境中其性能难以得到保障。 2.2 毫米波雷达毫米波雷达(Radar)通过发射无线电信号并接收反射信号来测定汽车车身周围的物理环境信息,如汽车与其他物体之间的相对距离、相对速度、角度、运动方向等。 毫米波雷达的工作频段为30~300GHz毫米波,毫米波的波长为波长为1~10mm,介于厘米波和光波之间,因此毫米波兼有微波制导和光电制导的优点。同时,毫米波雷达不受天气状况限制,即使是雨雪天都能正常运作,穿透雾、烟、灰尘的能力强。具有全天候、全天时的工作特性,且探测距离远,探测精度高,被广泛应用于车载距离探测,如自适应巡航、碰撞预警、盲区探测等。 但是毫米波雷达精度低、可视范围的角度偏小,一般需要多个雷达组合使用。雷达传输的是电磁波信号,因此它无法检测上过漆的木头或是塑料。并且行人的反射波较弱,几乎对雷达“免疫”。同时,雷达对金属表面非常敏感,如果是一个弯曲的金属表面,它会被雷达误认为是一个大型表面。因此,路上一个小小的易拉罐甚至可能会被雷达判断为巨大的路障。此外,雷达在大桥和隧道里的效果同样不佳。 2.3 激光雷达激光雷达可以创建周围环境的点云表征,提供了摄像头难以提供的一些信息,例如距离和高度。激光雷达传感器使用激光来测量自身与环境中的物体之间的距离,激光雷达发射激光脉冲,激光投射到物体上,然后反射回传感器,这时可以记录下所花费的时间,同样就能推算出物体距离传感器的距离,激光雷达就是这样来构建环境的视觉表征。下面这张图就是一个激光雷达感知数据的可视化展示。
激光雷达感知数据可视化展示 中间黑色的块区是无人驾驶车辆本身占据的空间,蓝色的线就是激光照射的物体,这种图我们通常称为点云图。点云密度越大,对于物体的描述会越清晰。点云中的每个点代表反射回传感器的激光束。这些点可以告诉我们很多关于物体的信息,比如物体的形状和表面的纹理。这些数据提供了足够的对象检测、跟踪或分类信息。激光雷达更多的提供了周围环境的空间级别的信息,这些信息是计算机视觉非常重要的输入内容。同时,激光雷达可以获得极高的角度、距离和速度分辨率。通常角分辨率不低于0.1mard也就是说可以分辨3km距离上相距0.3m的两个目标,并可同时跟踪多个目标;距离分辨率可达0.lm;速度分辨率能达到10m/s以内。距离和速度分辨率高,意味着可以利用距离——多谱勒成像技术来获得目标的清晰图像。 但是激光雷达工作时受天气和大气影响大,在大雨、浓烟、浓雾等坏天气里,激光传播距离大受影响。而且,大气环流还会使激光光束发生畸变、抖动,直接影响激光雷达的测量精度。同时,由于激光雷达产业发展还不成熟,激光雷达的价格高昂,使得无人驾驶车辆的制造成本急剧增加。 2.4 其他传感器超声波雷达。超声波雷达工作在机械波波段,工作频率在 20KHz 以上。超声波雷达多用于测距,其基本原理是通过测量超声波发 射脉冲和接收脉冲的时间差,结合空气中超声波的传输速度计算相对距离。超声波测距的优势主要有四点:对恶劣天气不敏感,穿透性强、衰减小;对光照和色彩不敏感,可用于识别透明和漫反射性差的物体;对外界电磁场不敏感,适用于存在电磁干扰的环境;原理简单、制作方便、成本较低,容易进行市场推广。但是超声波雷达也存在很大的不足,测距速度无法与光电测距和毫米波雷达测距相比,而且无法测量方位,应用领域受限。 听觉传感器。目前大部分智能驾驶车辆仅依靠视觉感知和雷达感知,已经能够完成绝大多数交通环境感知任务,因此往往忽略了听觉感知,很多智能驾驶车辆甚至是“聋子”。然而在人类驾驶员开车时,交通环境中有许多声音也会携带重要信息,例如喇叭、警笛等。智能驾驶车辆同样需要对环境中的声音有所感知并做出反应。按照相对于智能车辆位置区域的范围,听觉感知能力可分为三类: 1)个域听觉感知,即“听”车厢内的声音,主要是根据感知到的异常声音判断发动机等汽车零件的运行情况;2)局域听觉感知,通过辨识车体周边一定范围内的相关声音并做出反应;3)广域听觉感知, 即感知电磁波中的音频以获取最新道路信息等。个域听觉感知和局域听觉感知一般是通过麦克风阵列采集车体内部及外界环境中的声音信息,而广域听觉感知多是通过车载电台、手机、网络终端等平台获取无线通信系统承载的音频信息。 2.5 多传感器融合技术不同的传感器具备不同的性能,在不同的场景下使用不同的传感器或多种传感器同时作用对结果进行分析这就是感知融合。无人驾驶车辆通常使用激光雷达和毫米波雷达检测障碍物,用于融合输出的主要算法为卡尔曼滤波。卡尔曼滤波有两个部分,第一部分是预测状态,第二部分是更正测量结果。传感器融合可以提高感知性能,因为各传感器相辅相成,融合也可以减少跟踪误差,所以我们可以更加精准实现对道路上物体位置的预测。 |
【本文地址】
今日新闻 |
推荐新闻 |