控制点布设对无人机影像空三精度的影响 |
您所在的位置:网站首页 › 无人机航测精度要求是什么 › 控制点布设对无人机影像空三精度的影响 |
控制点布设对无人机影像空三精度的影响
|
1)在区域的四周布设平面控制点,在区域较大时,可以采用点组形式布设(对于无人机摄影,点组一般是指控制点之间的距离相离200~300m的几个点,有利于提高整体精度。 2)高程控制点应布成锁形。在高精度加密平面点位时,仍需要布设适当的高程控制点,以保证模型的变形不一致对平面坐标产生影响,如果旁向重叠比较小时(低于40%),每条航线两端必须各有一对高程控制点或点组。 3)如果用地面测量观测值代替或加强区域网的控制点,则有关平面的观测值(如距离、水平角、方位角等)最好布在区域周边或四周,有关高程的相对观测值(如高差、高度角等)应平行于航带方向布设[15-16]。 2 无人机航测控制点布设方案对比分析 2.1 无人机航测控制点布设方案
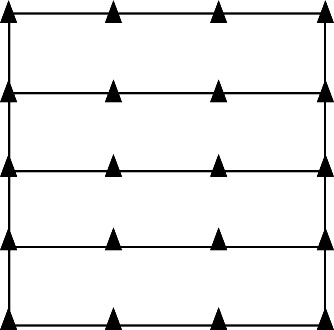
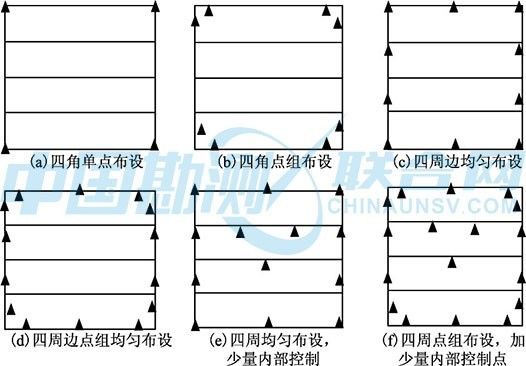
图1 传统无人机航测 若采用传统航测的布点方式(如图1所示),不但要求的控制点多,而且实施起来比较困难[1-2],性价比不高,无人机航测中,我们一般不用这种方法。本文根据上述无人机航测布设控制点的特点和原则,我们设计了以下6种无人机控制点布设方案: 1)采用四角单点布点方式(图2(a)):即只在测区的四个角布设控制点。 2)采用四角点组布点布点方式(图2(b)):即把测区的四角布设成点组的形式。 3)四周均匀布设,边角不加密(图2(c)):即在测区四周按照一定密度均匀布设控制点。 4)采用四周边均匀布设,四角点组布点方式(图2(d)):即在测区四周按照一定密度均匀布设控制点,边角处采用点组布设。 5)采用四周边均匀布设加少量内部点的布设方案(图2(e)):即在测区四周采用均匀布设控制点的方式,使用少量的内部控制点。 6)采用四周边均匀布设,四角点组布点,加少量内部点的布点方式(图2(f)):即在测区四周均匀布设控制点,边角处采用点组布设。
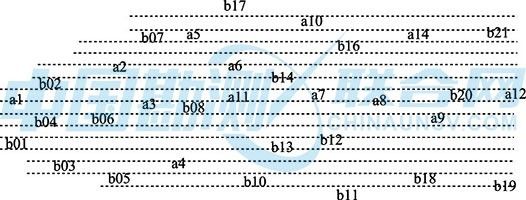
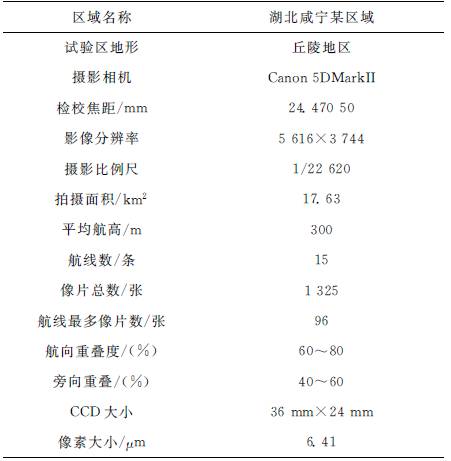
图2 适合无人机航测的6种布设方案 2.2 无人机控制点布设实验 在控制点分布与密度对无人机航测空三精度影响的研究中,我们选取了6种典型的布设方案,进行成果精度的分析和对比。以湖北省咸宁某区域作为实验区域,展开无人机航测获取该区域的无人机影像数据序列,图3为实验区域无人机影像航带图和控制点分布图,表1为作业区的相关信息。要求作业区的控制点精度相同,每个控制点都可以作为平高控制点,且每个控制点的平面坐标精度也满足作为平面控制点的精度,同时高程坐标的精度也满足单独作为高程控制点的精度。本文通过对32个不同的控制点布设方案的对比研究,来说明3种典型布设方案的优劣,找出无人机航测在满足精度的要求下最省外业的测量方法,为无人机更好应用和提高无人机摄影测量成图精度提供有意义和有价值的参考。
图3 实验区域无人机影像航带图和控制点分布图
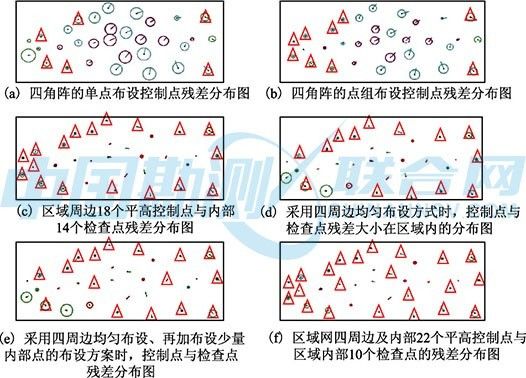
表1 无人机摄影数据相关信息 2.3 像控点布设与空三实验 1)采用四角单点的布点方式,即只在区域的四角布设6平高控制点(点b02,b03,b05,b07,b19,b21),图4(a)中三角所标示的为控制点(下同),其余的26个为量测控制点,被设为检查点。经光束法平差计算可得四角6个平高控制点与区域网内部26个检查点的残差分布,如图4(a)其中圆圈的半径代表控制点上高程的残差绝对值大小,而从圆心出发的射线的长度和方向表示控制点上X与Y 残差的向量之和(下同)。 2)采用四角点组的点组布点方式,即在区域的四角布设平高控制点(点a1,a2,b01,b02,b03,b05,b07,b19,b21),且布设成点组形式,其余的23个量测控制点,被设为检查点。经光束法平差计算可得四角9个平高控制点与区域网内部23个检查点的残差分布,如图4(b)。这样的布点是在方法1)的基础上,把单点布设改为点组布设,使整体精度有所提高。 3)采用四周边均匀布设,四角点组布点方式。即在四周均匀布设、四角点组加密布设,此方案采用了周边的18 个控制点(a1,a2,a5,a10,a12,a14,b01,b02,b03,b04,b05,b07,b10,b11,b17,b18,b19,b21),剩下的14个内部控制点被作为量测控制点。经光束法平差计算可得周边18个平高控制点与区域网内部14个检查点的残差分布,如图4(c)。该方案在方案2)的基础上,增强了对周边点的控制。 4)采用四周边均匀布设方式。即只在四周均匀布设控制点四角点组不加密。该方案共布设14个平高控制点(a2,a5,a10,a12,a14,b02,b03,b07,b10,b11,b17,b18,b19,b21),经平差后可得其控制点与检查点残差大小分布,如图4(d)。 5)采用四周边均匀布设、再加布设少量内部点的布设方案。即在方案4)的基础上,增加两个内部控制点(a8,b08)。经平差后可得其控制点与检查点残差大小分布,如图4(e)。 6)采用四周边均匀布设,四角点组布点,加中间点的布点方式。即在第3种方法的基础上,增加4个中间控制点(a3,a9,b12,b14)。经光束法平差计算可得区域网四周边检查点的残差分布,如图4(f)。
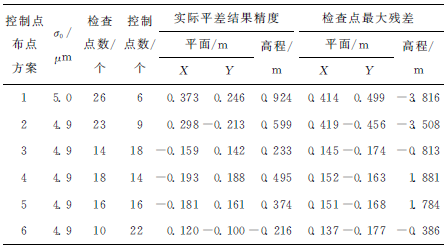
图4 残差分布图 2.4 各方案精度对比与分析 通过上述6种不同的控制点布设方案,对其相应的精度指标进行统计如表2所示。
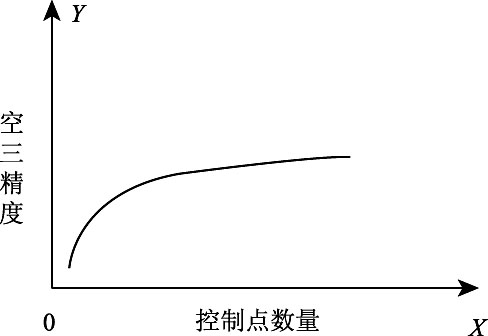
表2 不同控制点布点方案光束法区域网平差统计结果对比 通过表2各种不同控制点布设方案实验结果统计对比,我们可以得出: 1)只在区域四角布设平高控制点,虽然控制了整个测区,但是控制点精度太低。相较之下,区域四周均匀布设平高控制点可以大大提高整体精度。 2)6种方案中,采用四角点组布点,四周边均匀布设,加少量区域中间点的布点方式精度最高。根据数字化测图规范,这种控制点布设方案所获的结果完全能满足1∶2 000的数字化成图。 3)本次实验特意设定了点组控制点布设方案与单点布设方案实验比较,实验结果证明,点组布设方式与单点布设方式相比,其精度有着明显的提高,甚至恰当的区域四角点组布设控制点比四角单点布设加区域中间布设控制点的精度都要高,这就意味着对于光束法平差来说,只要区域周边均匀布点及区域四角布设合适的点组,那么区域中可以不用布设控制点,这样就大大方便了大型区域网控制点的布设,也提高了外业工作效率。 3 控制点的密度和分布对空三精度的影响 3.1 控制点的密度对空三精度的影响 实践中,对从各方案的比较分析,可以得出: 采取点组均匀布设时,控制点的密度过小,多余的观测量不足,会影响到解算精度。适当增加控制的密度,可提高空三解算的精度,但是并不是控制点密度越大越好,如图5所示,点组均匀布设时,控制点的数量对空三精度的影响。过多的控制点不但大大增加外业和内业的工作量,而且对于空三精度的提高并没有太多的作用,性价比不高。
图5 点组均匀布设时,控制点数量对空三精度的影响 3.2 控制点的分布对空三精度的影响 由于无人机区域网空中三角测量的精度最弱点位于区域的四周,而不在区域的中央,区域内部精度高而且均匀,精度薄弱环节在区域的四周。从各方案比较分析可以得出:在条件允许的情况下,控制点应该均匀布设在摄区,并且要加强测区边角的控制。这样做不但可以在满足精度要求条件下减少控制点的数量,而且可以有效改善区域四周的精度。 4 结束语 本文提出了一种适于无人机航测的布点方案:四周边均匀布设平高点、四角布设成点组,加少量内部控制点。通过对6种典型的适用于无人机航测的均匀布点方法进行实验和对比分析,表明本文提出的四角点组布点方案得到的空三精度最高,与传统的摄影测量布点方式相比,易于实施且需要的控制点数量较少。 在实践中,我们发现:无论区域大小,四周均匀布设控制点,四点布设平高控制点均有利于保证区域内部的精度。一般情况下,单点布设的精度都不如点组布设精度高,而且点组布设也可以增加平面高程的精度。另外,计算过程中,平差开始时的迭代应将控制点的权值设计较小,在迭代过程中应根据单位权中误差的大小逐步加大控制点的权值,这样就能获得较高精度的平差结果。返回搜狐,查看更多 |
【本文地址】
今日新闻 |
推荐新闻 |