无人机怎么做测绘?手把手教你制作高精度地图和数字线画图 |
您所在的位置:网站首页 › 无人机制图软件名称大全 › 无人机怎么做测绘?手把手教你制作高精度地图和数字线画图 |
无人机怎么做测绘?手把手教你制作高精度地图和数字线画图
|
3) 分区基准面高度的确定 依据分区地形起伏、飞行安全条件等确定分区基准面高度。 4) 生成航线 在地面站系统中进行航线的设计,分别将每个摄影分区的四角坐标输入到地面站软件,设置航线的间距和飞行的方向,软件可自动生成航线文件。 5) 航摄季节和航摄时间的选择 a) 航摄季节应选择摄区最有利的气象条件,应尽量避免或减少地表植被和其他覆盖物(如积雪、洪水等)对摄影和测图的不利影响,确保航摄影像能够真实地显示地面细部。 b) 航摄时,既要保证具有充足的光照度,又要避免多大的阴影。 c) 森林、草地、大面积的盐滩、盐碱地,当地正午前后各2小时内不应摄影。 d) 陡峭山区和高层建筑物密集的大城市应在当地正午前后各1小时内摄影,条件允许时,可实施云下摄影。 二、航摄作业 航摄作业时,安全是首要考虑的要素,因此飞机组装完成后,要进行一系列严格的检查并进行详细的记录,在确保安全的情况下才能升空作业。具体的检查项包括: (1)俯仰检查 检查陀螺零点正确,俯仰角正确,两个数据都是向上为正值。UAV模式下,飞机俯仰变化时,升降舵面向相应方向偏转阻尼俯仰变化。 (2)滚转检查 陀螺零点正确,滚转角正确,右滚为正值。UAV模式下,绕机身轴线滚转飞机时,副翼舵面向相应方向偏转阻尼滚转变化。 (3)水平设置 当飞控在飞机里面安装之后,通过设置俯仰滚转偏置使飞控的俯仰角和滚转角与飞机姿态对应起来。将飞机机翼水平放置,将飞控的俯仰滚转角清零。 (4)空速检查 将空速管前用手遮挡住气流,此时空速显示值在零附近,否则请重新设置空速零位。再用手指堵住空速管稍用力压缩管内空气,空速显示值应逐渐增加或者保持,否则就有可能漏气或者堵塞。 (5)高度计检查 如果有条件得到当前控制盒所在高度的气压值,在地面站上设定当前气压值和当前的高度值。变化飞机的高度,高度显示值将随之变化。 (6)转速检查 如果飞机安装了转速传感器,用手转动发动机,观察是否地面站是否有转速显示。转速分频设置是否正确。 (7)GPS定位检查 从开机到GPS3D定位的时间应该在1分钟左右,如果超过5分钟还不能定位,检查GPS天线连接或者其他干扰情况。定位后卫星数量一般都在6颗以上,PDOP水平定位质量数据越小越好,一般在1到2之间。 (8)震动测试 发动发动机,在不同转速下观察传感器数据的跳动情况,舵面的跳动情况,特别是姿态表(地平仪)所示姿态数据。所有的跳动都必须在很小的范围内,否则改进减震措施。 (9)电池测试 通过放电试验确定电池的有效工作时间,确保以后的飞行都在可靠的有保证的供电时间内。 (10)数传发射对传感器的影响测试 在UAV模式下,如果影响较大,查看传感器数据中的实际值,观察陀螺数值是否都在零点左右;否则发射机天线位置必须移动。其他发射机也必须这样测试。 (11)接插件检查 所有接插件接插牢靠,特别是电源。 (12)风门设置检查 发动发动机,捕获设置风门最大值,最小值(稳定工作怠速偏上)和能够收风门停车的位置。确保能够控制停车。 (13)动态传感器数据观察 遥控飞行中观察所有传感器数据,特别是高度计,空速计和陀螺。 (14)空速计系数 无风天气飞行中观察GPS地速与空速,修正空速计系数。 (15)相机检查 三、地面站监控 飞机升空作业后,地面站开始对飞机工作状态进行实时监控,驾驶人员应时刻关注发动机的转速、飞机的高度及速度等指标,如发现异常应立刻做出判断和处理。 四、现场数据整理、检查 航摄完成后应在现场对航摄数据进行检查和整理。检查曝光点数与影像数是否一致,若不一致应及时查找原因;检查每条航线的记录值与实际飞行的影像数是否一致。在保证原始影像每张都能打开,每张存储完整,且不发虚曝光适中的情况下进行数据整理。将影像按照航线数分别装载于文件夹,每条航线的影像数量应一致。 五、质量检查及补飞 利用航空摄影测量系统软件,对航摄成果质量的进行全面、快速检查。该软件的检查功能包括:计算航向重叠度、旁向重叠度、生成检查结果报表等。检查完成后输出检查记录,不合格影像做好相应记录并安排补飞。
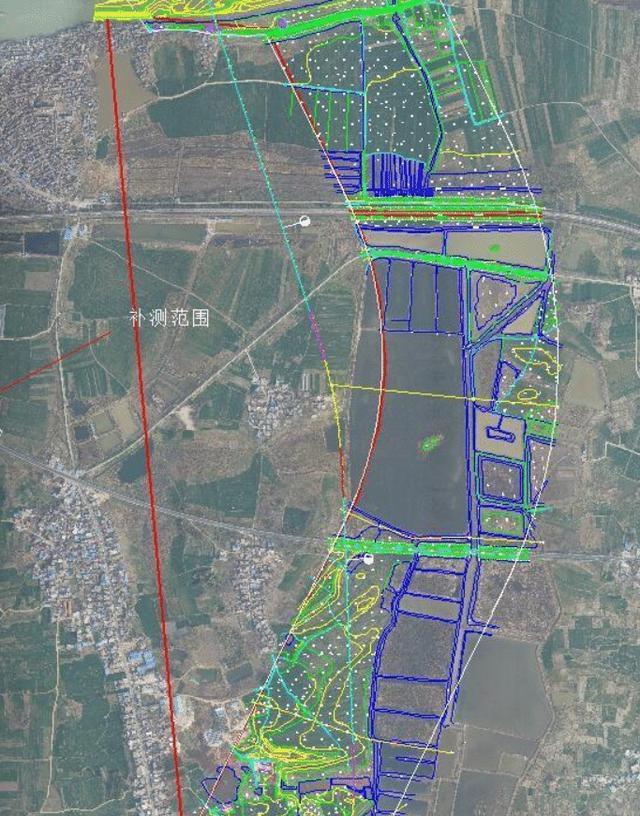
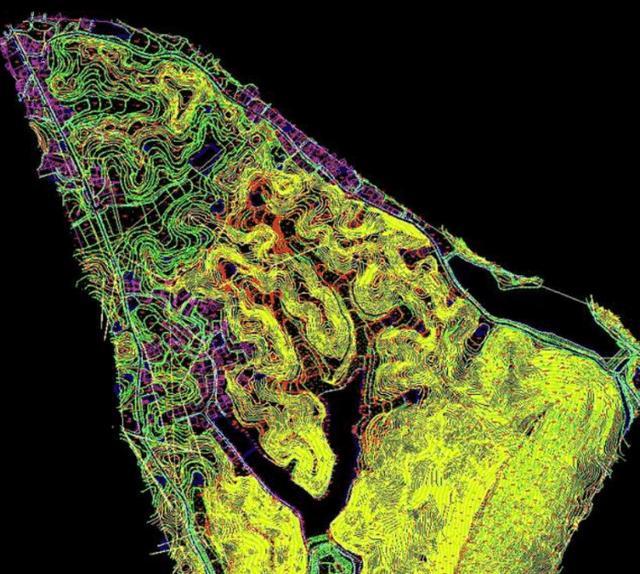
六、航飞成果整理 通过检查的航摄成果按以下内容逐项整理,并提交给内业: 1) 影像数据; 2) 相机检校报告; 3) POS曝光点数据 机载GPS辅助空中三角测量 空中三角测量的任务是以像片控制点、数码航摄资料为依据,在SmartVisionSpace近低空摄影测量系统进行像点观测,采用光束法平差进行区域网平差计算。 七、空中三角测量 空三加密是每个做航测的软件都要有的流程,做测绘需要的是精确的位置和高程,而空三的目的就是计算出每个点所在的位置。 1)标准点位缺点时,要人工补点。自动选取、保留的加密点和人工补加的加密点应满足规范要求。 2)每个模型选取4个以上检查点,且点位要选在明显的地物上并裁出点位小影像;检查点成果、小影像整理后交院资料室备查,该成果仅提供给检查使用。 3)量测外业控制点时,要按外业提供的像控点小影像及点位说明认真判读。 4)加密点、控制点要保证全测区没有重号。 5)区域网接边。当接边出现超限现象时应查明原因,及时上报处理。 6)创建立体模型后,用Mapmatrix作绝对定向并检查绝对定向的残差是否满足测图精度。成果经100%作业员自查互校、100%分事业部检查、30%公司总工级检查合格后整理提交下工序。 九、航测内业采集 做完空三后,就可以生成正射影像,就是我们的高精度地图。我们现在的航测做出来的地图精度要比卫星地图清晰非常多了。同时,我们可以采集线画图,采集的线画图就是我们的最终成果啦! 我们的成果可以给设计、规划等部门,他们会让我们的城市建设变得更加美丽!
|
 返回搜狐,查看更多
返回搜狐,查看更多【本文地址】
今日新闻 |
推荐新闻 |