过程控制课程设计前馈 |
您所在的位置:网站首页 › 控制系统仿真总结报告 › 过程控制课程设计前馈 |
过程控制课程设计前馈
|
文末 获取完整设计报告+matlab/simulink仿真源文件
一、课程设计任务分析
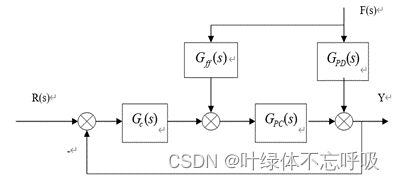
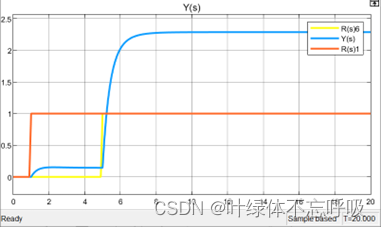
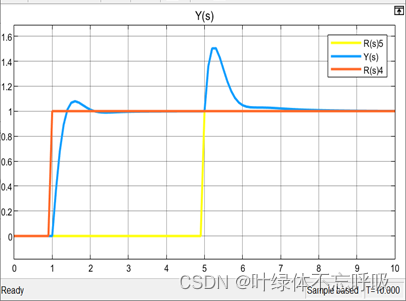
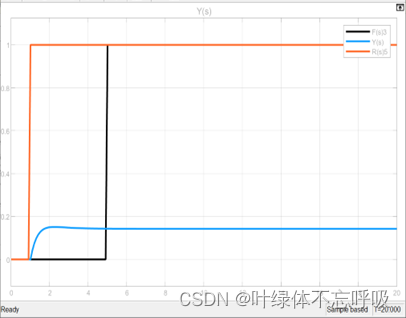
已知过程的传递函数为 G_PC (s)=(s+1)/(s+2)(2s+3) ,G_PD (s)=5/(s+2) ,控制器使用PID规律。试设计一个前馈-反馈控制系统中前馈调节器的数学模型G_ff,并用SIMULINK和MATLAB程序仿真实现。当扰动信号F(s)分别用单位阶跃信号和SINS信号,系统设定值R(s)为1时,调整PID参数,既能克服干扰F对系统的影响,又能跟踪设定值R的变化。(假设检测变送环节的传递函数为1)。 1、设计要求 ①给出前馈控制器的模型表达式; ②提供系统仿真图; ③给出设计完成后系统的调试步骤说明,实验结果的说明及实验数据分析; ④若控制通道存在大纯滞后,即G_PC (s)=(s+1)/(s+2)(2s+3) e^(-10s),控制性能会如何变化?给出改进前馈-反馈孔控制系统结构模型控制方案和仿真分析结果。 ⑤撰写实验报告。 2、流程分析 系统中既有针对主要扰动信号进行补偿的前馈控制,又存在对被调量采用反馈控制以克服其他的干扰信号,这样的系统就是前馈-反馈控制系统。前馈控制系统的作用是对主要的干扰信号进行补偿,可以针对主要干扰信号,设置相应的前馈控制器。引入反馈控制是为了是系统能够克服所有的干扰信号对被调量的影响,除了己知的干扰信号以外,系统中还存在其他的干扰信号,这些扰动信号对系统的影响比较小,有的是能够考虑到的,有的无法考虑或是无法测量,都通过反馈控制来克服。系统中需要测量的信号既有被调量又有扰动信号。 二、对象特性分析由题目可知,系统的控制通道传递函数为G_PC (s)=(1/6(s+1))/(1/2 s+1)(2/3 s+1) ,扰动通道传递函数为G_PD (s)=5/(s+2)。因此该被控过程为自衡的多容过程,也就是当输入发生变化时,无需外加任何控制作用,过程能够自发地趋于新的平衡状态。 被控过程的静态增益(放大系数)K=1/6,即输出变化量与输入变化量之比,易知放大系数较小,过程的控制作用较弱。根据其时间常数T_1=1/2,T_2=2/3,可知控制过程较慢。 干扰通道传递G_PD (s)=5/(s+2),其静态增益K=5/2,可以看出扰动通道的放大系数较大,即较小的扰动就会给系统带来较大的影响,应采用前馈-反馈控制来消除扰动的影响。 三、控制方案设计与仿真1、系统初始结构 由设计要求可知,控制通道传递函数为G_pc(s)=(s+1)/((s+2)(s+3))和干扰通道传递函数为G_pd(s)=5/(s+2),输入设置为单位阶跃信号,在不加入PID控制器与前馈控制器时,组成简单的单闭环系统,建立出系统的原始结构框图如图4-1所示。 当干扰输入设置为单位阶跃响应信号时,仿真时间设置为20s,在第10s时加入干扰,得到系统仿真波形如图4-2所示。 由图4-2可知,在没有控制器时,输出不能跟随给定,有严重的余差,在干扰加入之后,系统的抗扰性能非常差。 当干扰输入设置为正弦信号时,仿真时间设置为10s,得到系统仿真波形如图4-3所示。 2、加入PID控制器后 为系统加入PID控制器来使控制变量维持在设定值上。得到系统仿真结构图4-4所示。 当干扰输入设置为单位阶跃响应信号时,仿真时间设置为10s,在第5s时加入干扰,得到系统仿真波形如图4-5所示。
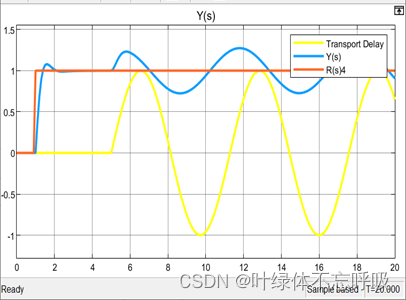
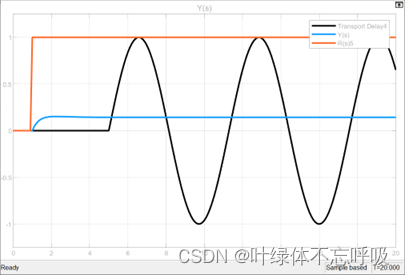
由图4-5可知,系统可以快速稳定,但是在干扰出现后系统稳定性明显下降,有较大的超调,并且需要更长的时间再次恢复稳定。 当干扰输入设置为正弦信号时,仿真时间设置为20s,在第5s时加入干扰,得到系统仿真波形如图4-6所示。
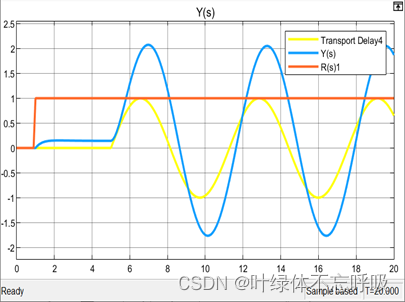
由图4-6可知,系统在干扰出现时受到影响产生超调而且反馈控制作用有一定的滞后,不能及时消除扰动。 3、加入前馈控制器后 引入前馈控制器来测量进入过程的干扰量并根据测量值立刻产生控制作用改变控制量。此时未加入PID控制器,仅构成前馈控制系统如图4-7所示。 当干扰输入设置为单位阶跃响应信号时,仿真时间设置为20s,在第5s时加入干扰,得到系统仿真波形如图4-8所示。
由图4-8可知,系统在干扰出现时受到干扰影响很小,但系统有较大的余差,不能很好的跟随给定。 当干扰输入设置为正弦信号时,仿真时间设置为20s,在第5s时加入干扰,得到系统仿真波形如图4-9所示。
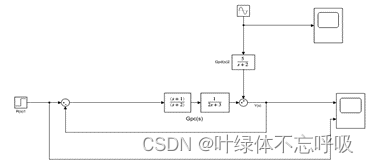
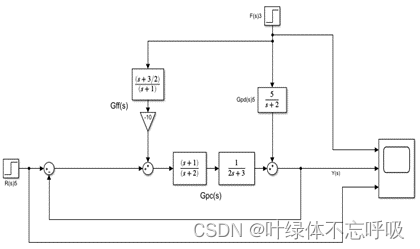
由图4-9可知,系统在正弦信号干扰出现时仍然可以保证系统稳定,使系统受到干扰影响很小,但系统有较大的余差,不能很好的跟随给定。 4、前馈-反馈控制系统 在系统中同时加入前馈控制器和PID控制器,得到完整的前馈-反馈控制系统如图4-10所示。(详见文末获取) 对于系统PID参数的整定,此处使用Tuner功能来完成PID参数的自动整定。如图4-11所示。(详见文末获取) 当干扰输入设置为单位阶跃响应信号时,仿真时间设置为10s,在第5s时加入干扰,得到系统仿真波形如图4-13所示。(详见文末获取) 由图4-13可知,前馈-反馈控制系统虽然有一定的超调,但系统快速性好,且在干扰加入时,系统基本不受干扰影响。 当干扰输入设置为正弦信号时,仿真时间设置为20s,在第5s时加入干扰,得到系统仿真波形如图4-14所示。(详见文末获取) 由图4-14可知,系统在正弦信号干扰加入时,系统稳定性仍然保持不受影响。满足设计目标的要求。 5、系统存在大滞后 在前馈-反馈控制系统的控制通道加入大滞后环节,滞后时间设置详见源文件。组成系统仿真框图如图4-15所示。(完整内容详见文末获取) 6、史密斯预估补偿器 利用史密斯补偿原理设计史密斯预估补偿器。它的特点是预先估计出过程在基本控制输入下的动态特性,然后由预估器进行补偿,使调节器提前动作,从而减小超调量和加速调节过程。其仿真模型框图如图4-18所示。(完整内容详见文末获取) 四、设计总结与体会通过此次课程设计,我们小组三人对前馈反馈控制、PID参数整定、滞后环节危害以及史密斯控制有了更深的认识,体会到了小组分工合作的重要性,并将我们在课本所学的知识应用到实际中。在这个过程中,我们也遇到了很多问题,很多次都无法调到理想的PID控制器参数,通过查询资料,明白了Simulink可以进行PID自整定。了解了这一点,我们摒弃了传统的整定参数方法,使用Simulink Library Browser中的Continuous模组中的PID controller自带的Tuner功能来完成PID参数的自动整定。这让我们对于MATLAB使用有了更深刻的认识。 尽管PID参数整定问题解决了,但刚开始输出波形结果不是特别理想。在这个过程中,我们小组三人认真讨论并通过曲线对比分析原因所在,把每一处可能出现的问题的地方细致地的检查,各尽所能,最终取得了良好的控制效果。这个过程,我们不仅仅学习了新知识,巩固了所学的知识,更锻炼了我们的思维能力与团队合作能力,这或许是课程设计的魅力所在。
|
 由图4-3可知,系统不仅快速性差,而且在引入正弦信号后无法稳定产生振荡。
由图4-3可知,系统不仅快速性差,而且在引入正弦信号后无法稳定产生振荡。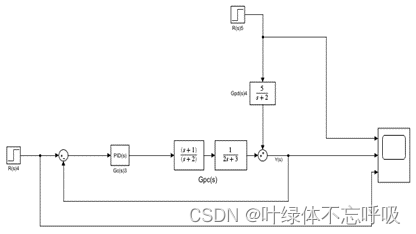
【本文地址】
今日新闻 |
推荐新闻 |