简述PID原理及临界比例度法参数整定 |
您所在的位置:网站首页 › 振荡周期的计算公式 › 简述PID原理及临界比例度法参数整定 |
简述PID原理及临界比例度法参数整定
|
PID原理:
(1)P比例系数(proportional) (2)I 积分系数(integral) (3)D微分系数(derivative) 1.比例调节 Up = Kp×error(t) 其中error = currentValue - totalValue(当前测量值 - 目标值) Kp为比例系数,调节比例系数课提高系统的响应速率,使其按一定的速度比例控制进行对目标值的靠近。(就比如,水桶加水例子,设当前水量为0.6,目标量是加水到1,Kp的值为0.5,第一次加水为(1.0-0.6)*0.5,第二次加水为(1-0.8)*0.5,这样按一定的速度调节) 然而,单纯的比例调节对震荡较厉害的系统,无法将系统调节稳定。有如,当Up(比例调节输入量)与系统引起的输出量相等后相互抵消,这种情况下系统却达到稳定状态,但系统仍然没有达到目标值,这种情况也称为稳态误差。(接着水桶例子,第二次加水量为0.1,但与此同时水桶漏水量也为0.1,但水桶稳定在0.9的状态无法达到目标值) (稳态误差:系统从一个稳态过度到新的稳态,或系统受干扰作用又重新平衡后出现的偏差。简单说就是系统稳定后,系统输出和设计的期望输出之间的差值) 2.积分调节: Ui = Ki× ∫error(t)dt 其中离散化的误差可表示为Ui = Ki×Σerror,表示对前面若干次的误差进行累计(只要存在误差就会不断进行积分,并起到一定的力度调节,就比如,只要存在错误就一直在改正,连续几次犯同一种错误,改正的力度也就越来越大),从而弥补了单纯比例调节存在的问题,有效的减少稳态误差的作用。(由于公式中的积分和微分无法使用,故此需要进行离散处理) 3.微分调节: Ud = Kd×derror(t)/dt 在离散情况下,微分调节可写成 Ud = Kd × [error(t) - error(t-1)],其作用起到“阻止”作用,其对当前误差与上次误差的影响,对上次与当前值进行对误差趋势的预测,能有效的防止超调量,缩短调节时间,(就比如上次误差为0.4,这一次的误差为0.2,Ud输出量为负值,故而可以看出其通过误差变化趋势来控制其输出量,也可以认为按照趋势起抑制作用的效果)从而减少控制过程中的震荡,使其稳定在系统区域。 PID公式计算:
进行公式的离散化处理: 由于积分微分无法使用,故此将其两个进行离散化处理。 经离散化后得到下公式: 增量式计算: 增量式是因为输出量是控制量的增量,可按下式表示: 位置式计算: 位置式控制当前系统的实际位置与目标位置的偏差,故此积分调节中的积分项为误差的积累。 步骤(1) 将积分时间常数Ti =∞ ,微分时间常数Td = 0,在闭合的调节系统中将比例度取适当值; 步骤(2)将比例度从大到小地逐渐调节,观察震荡过程。等观察到等幅震荡时,记下临界比例度的值δK和临界震荡周期的值Tk。(控制量出现等幅震荡,控制作用为一种临界状态) 根据经验公式结合PID公式: 由于上表多为经验公式,故此仍需要进行微调。 有的系统不允许临界振荡,临界振荡的幅度可能较大,也可能变为振幅越来越大的发散振荡可选择以下方法: http://bbs.gkong.com/archive.aspx?id=339040 如果跃迁响应的超调量太大,应减小控制器的比例系数、增大积分时间。 如果超调量仍然较大,逐渐增大微分时间。 如果阶跃响应没有超调量,但被控量上升过于缓慢,过渡过程时间太长,应按增大控制器的比例系数。 如果消除误差的速度较慢,可以适当减小积分时间。 根据上述比例-积分-微分所起到的功能,且顺序先从比例再到积分最后才到微分的形式合理调试。 若有理解有误的话,望大佬们指出。 |
 其中: u(t) – 控制器输出控制量 e(t) – 偏差信号 (当前测量值 - 目标值) Kp — 比例系数 Ti —积分时间常数 Td—微分时间常数
其中: u(t) – 控制器输出控制量 e(t) – 偏差信号 (当前测量值 - 目标值) Kp — 比例系数 Ti —积分时间常数 Td—微分时间常数 k —采样序号(k=1,2…) T—系统周期 t—离散采样时间
k —采样序号(k=1,2…) T—系统周期 t—离散采样时间 常规的PID控制算法中一般分(增量式PID)和(位置式PID)
常规的PID控制算法中一般分(增量式PID)和(位置式PID) 将(5)式代入(6)可得:
将(5)式代入(6)可得:  故(7)为增量式最终公式。
故(7)为增量式最终公式。
 其中比例度是调节器放大倍数Kp的倒数
其中比例度是调节器放大倍数Kp的倒数 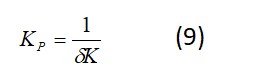 步骤(3)根据所记数据,采用经验公式,计算出调节器的各个参数:
步骤(3)根据所记数据,采用经验公式,计算出调节器的各个参数: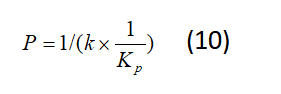 其中这里的k为上表比例度系数(k=2’,2.2,1.78)。 之前所调节出来Kp为出现等幅震荡的比例系数,也就是临界系数,通过(9)(10)式的计算,计算等到一个响应较好的比例系数P. 此时可令Kp = P(由上式子所计算出来的比例系数),代入下式计算I、D的系数
其中这里的k为上表比例度系数(k=2’,2.2,1.78)。 之前所调节出来Kp为出现等幅震荡的比例系数,也就是临界系数,通过(9)(10)式的计算,计算等到一个响应较好的比例系数P. 此时可令Kp = P(由上式子所计算出来的比例系数),代入下式计算I、D的系数 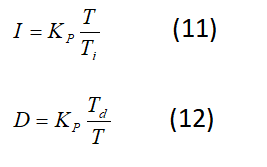
【本文地址】